
仿昆虫四翼扑动机构.pdf

是你****馨呀

1/8
2/8

3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
仿昆虫四翼扑动机构.pdf
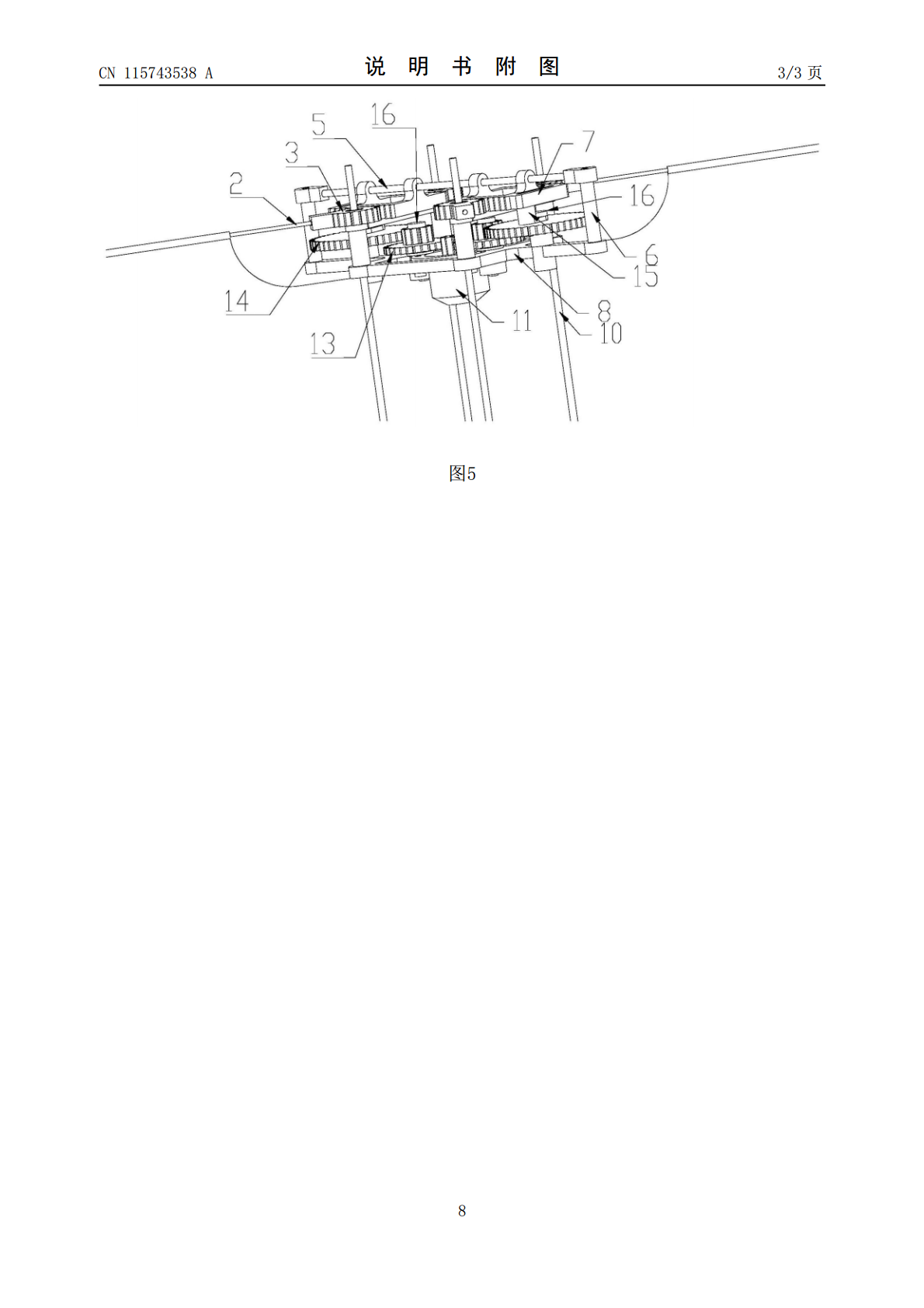
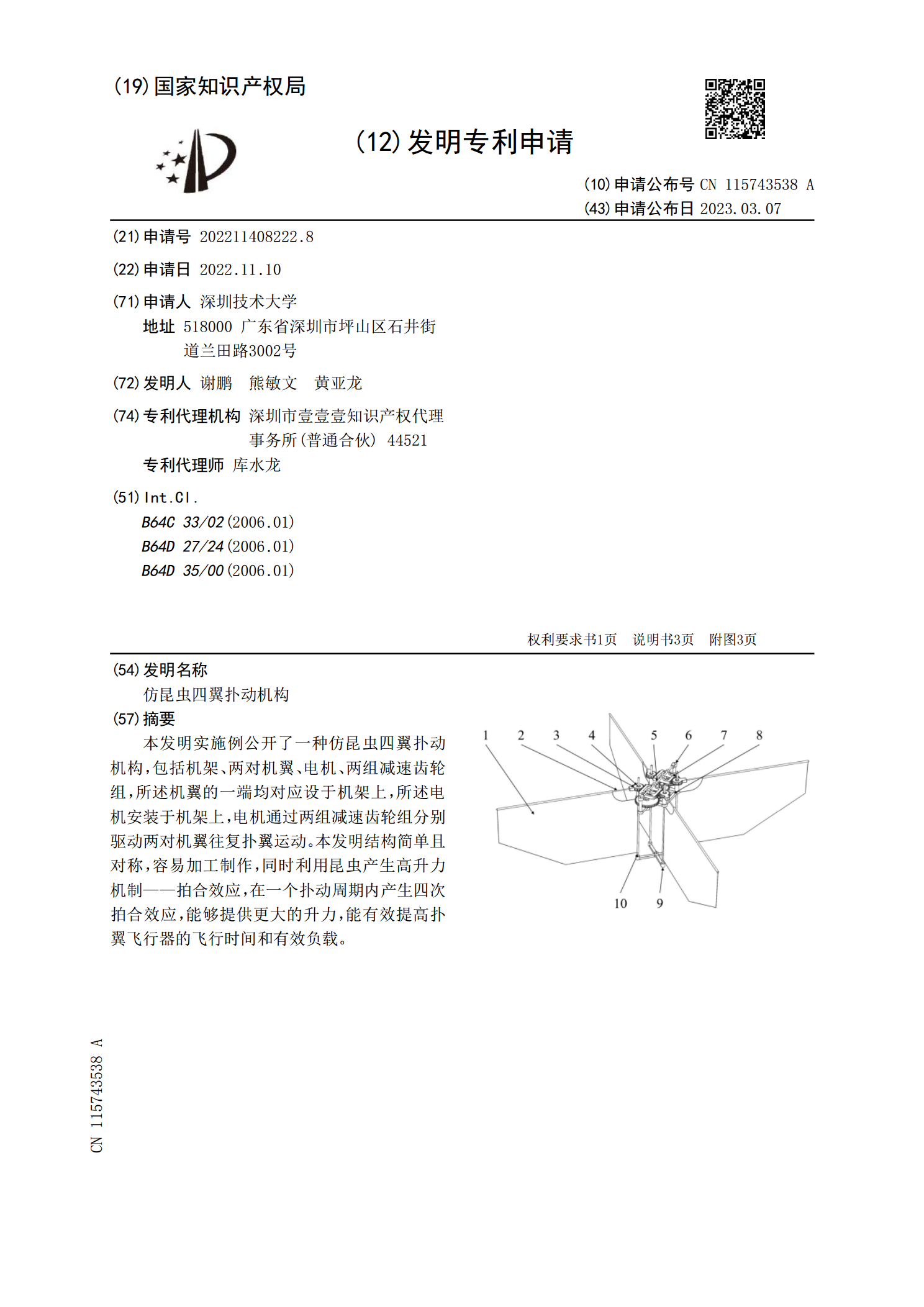
本发明实施例公开了一种仿昆虫四翼扑动机构,包括机架、两对机翼、电机、两组减速齿轮组,所述机翼的一端均对应设于机架上,所述电机安装于机架上,电机通过两组减速齿轮组分别驱动两对机翼往复扑翼运动。本发明结构简单且对称,容易加工制作,同时利用昆虫产生高升力机制——拍合效应,在一个扑动周期内产生四次拍合效应,能够提供更大的升力,能有效提高扑翼飞行器的飞行时间和有效负载。

一种仿昆虫飞行器的扑翼机构.pdf
本发明公开了一种仿昆虫飞行器的扑翼机构,包括机体、平面8字形轨迹生成机构,翼杆和连接节,平面8字形机构由曲柄滑块机构和曲柄摇杆机构组合而成,曲柄滑块机构中的滑块(7)通过导杆(8)与曲柄摇杆机构中的摆轨(6)形成滑动副,翼杆包括内翼杆(19)和外翼杆(20),内翼杆(19)和外翼杆(20)形成滑动副,内翼杆(19)通过万向节(21)与滑块(7)连接,万向节(21)一端固接于滑块(7)上,另一端固接于内翼杆(19)上,外翼杆(20)与连接节形成转动副。采用此机构,可以在翼尖画出8字形轨迹,改变齿轮、连杆或安
仿蝴蝶微型扑翼机飞行原理及扑翼机构研究(已处理).pdf
仿蝴蝶微型扑翼机飞行原理及扑翼机构研究摘要微扑翼飞行器Flapping-wingmicroaerialvehicles模仿鸟类或昆虫的飞行原理,具有体积小、重量轻、隐身性好等优点,被广泛使用到军用和民用领域。本文以仿蝴蝶微型扑翼机为研究对象,首先分析凤蝶的飞行参数,在此基础上,建立了仿蝴蝶扑翼机的参数化模型,研究了仿蝴蝶扑翼机的流体和扑翼机构的运动特性。(1)对凤蝶的扑翼飞行和微观形态进行了整理和分析,获得了凤蝶扑翼飞行的尺寸参数及运动参数,为仿蝴蝶扑翼机的数值建模和机构分析提供了数据参考。(2)以流体仿

基于齿轮齿条机构的仿蜂鸟扑翼机构.pdf
本发明实施例公开了一种基于齿轮齿条机构的仿蜂鸟扑翼机构,包括机架、电机、电池、飞行控制器、尾翼、一对机翼、扑动机构、飞行姿态控制机构,所述一对机翼对称设置在机架两侧,扑动机构、飞行姿态控制机、电机、电池、飞行控制器设于机架上;扑动机构采用齿轮齿条机构,驱动机翼做往复扑翼运动;飞行姿态控制机构由两个旋转舵机和一个电磁舵机组成,两个旋转舵机分别控制两个机翼的角度;电磁舵机控制尾翼的运动,实现扑翼机构的滚转。本发明结构简单、对称性好、容易加工制作、飞行姿态控制简单、可实现较大的扑动幅度。

基于PD控制的仿昆虫扑翼样机研制.docx
基于PD控制的仿昆虫扑翼样机研制基于PD控制的仿昆虫扑翼样机研制摘要:本文针对仿生机器人领域中的仿昆虫扑翼样机研制进行了研究。该样机以昆虫飞行机理为基础,通过采用PD控制策略进行控制,实现了扑翼运动的模拟。研究结果表明,该样机在模拟昆虫飞行过程中具有较好的稳定性和控制性能,为进一步探索昆虫飞行机理提供了实验基础。关键词:仿昆虫扑翼样机;PD控制;飞行机理;稳定性;控制性能1.引言仿生机器人是一种模仿生物形态、生理和行为的机器人,旨在实现生物的特定功能。其中,仿昆虫扑翼样机是一种近年来备受关注的研究方向。昆