
基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构.pdf

康平****ng


1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构.pdf
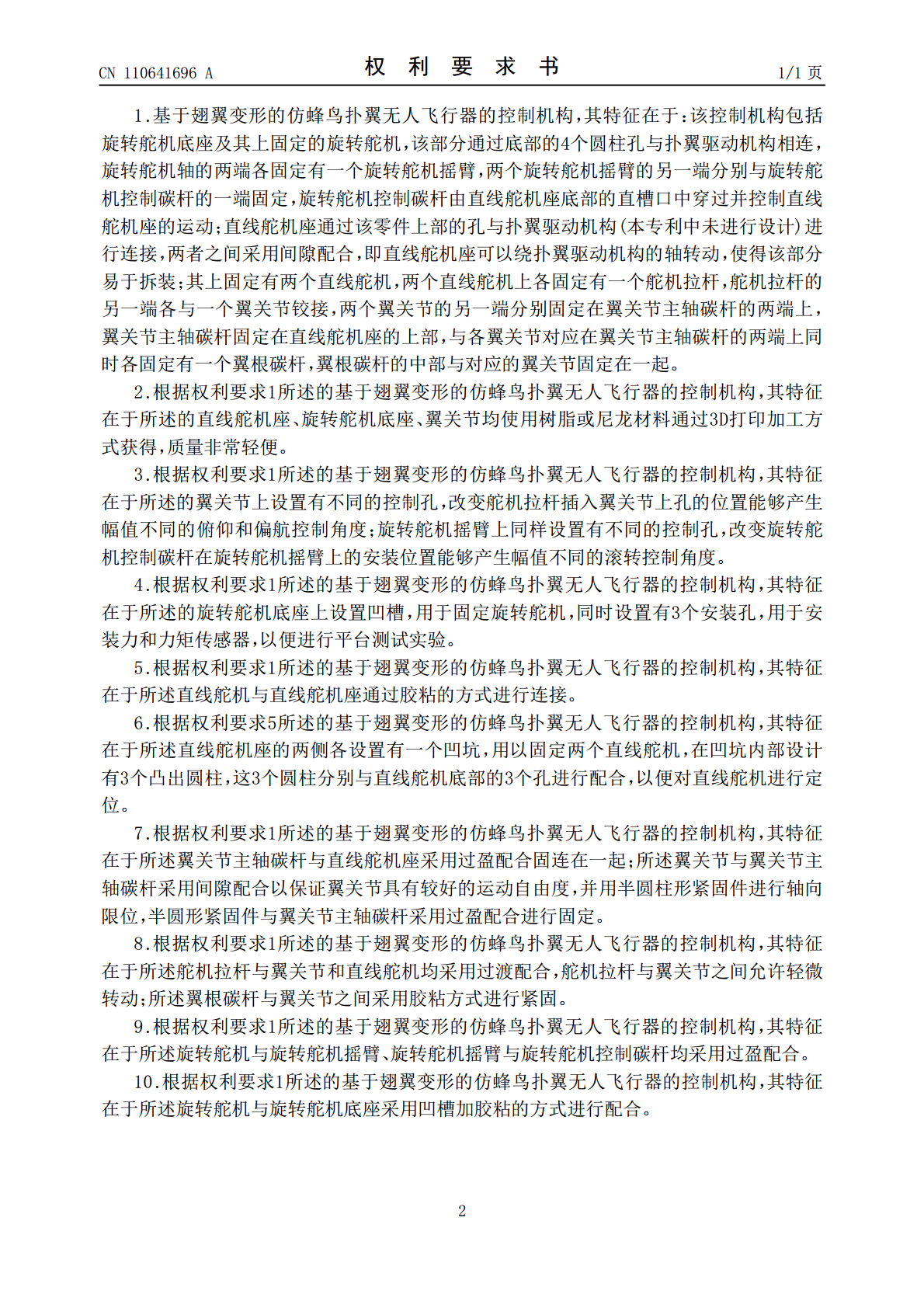
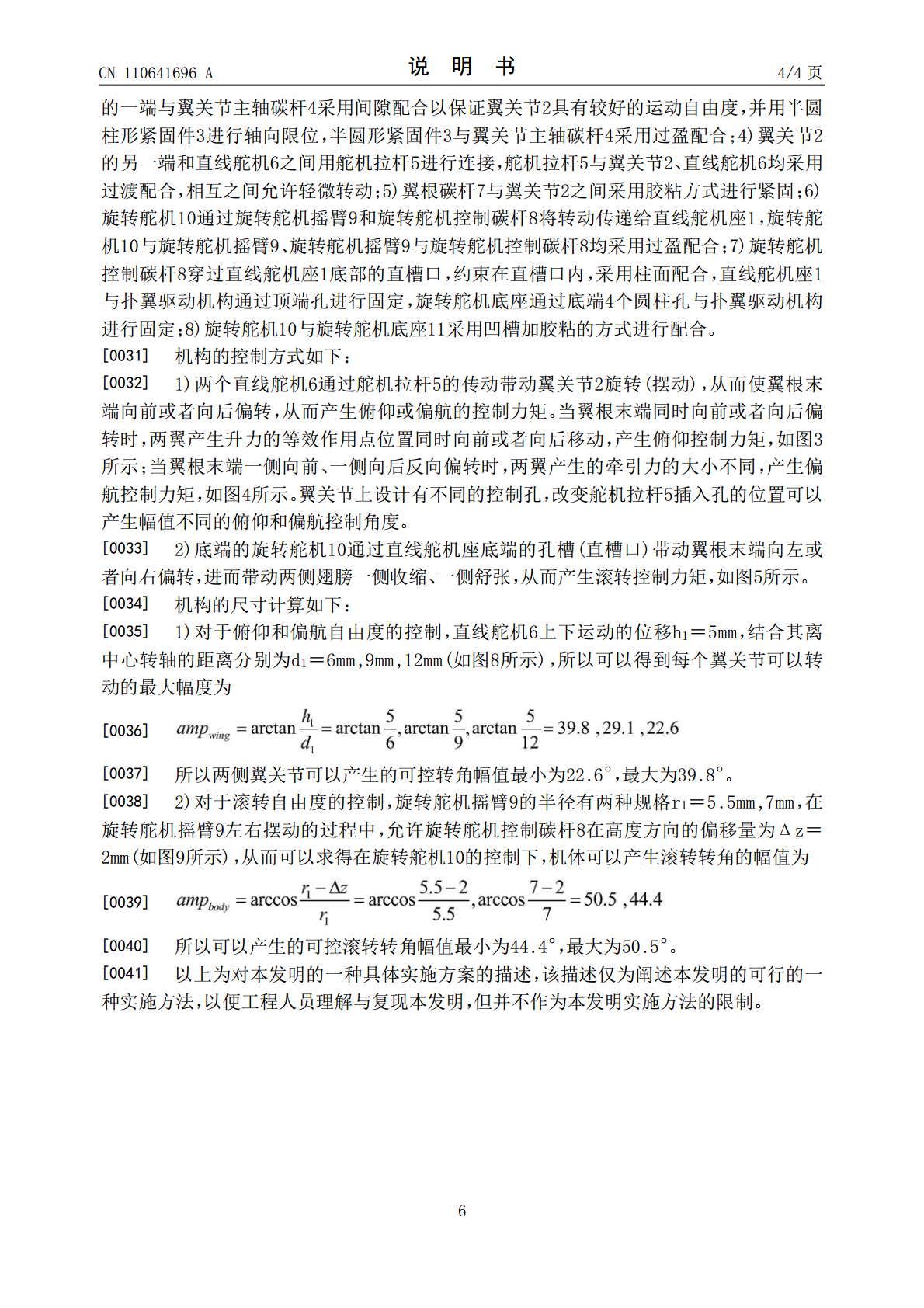
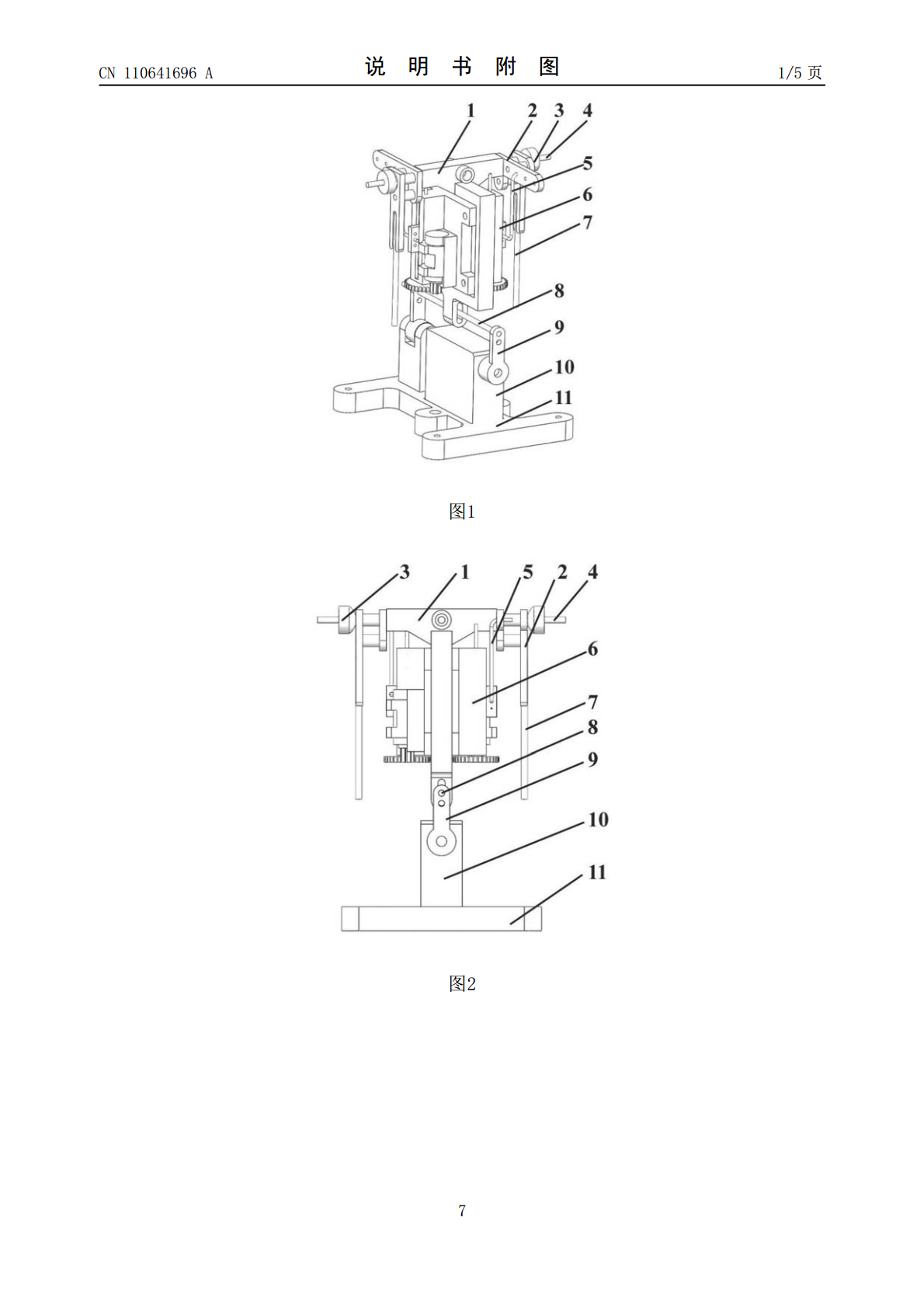
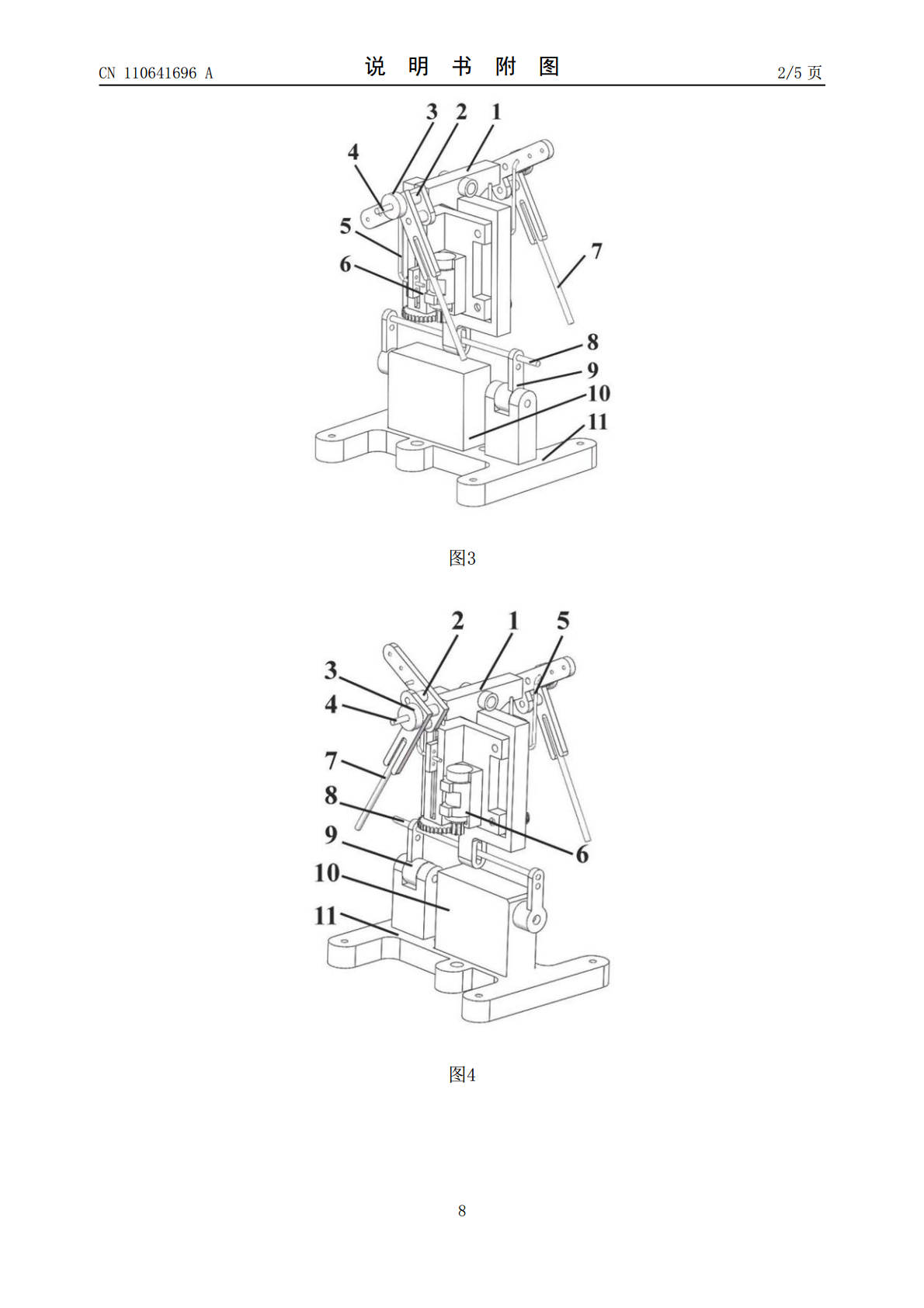
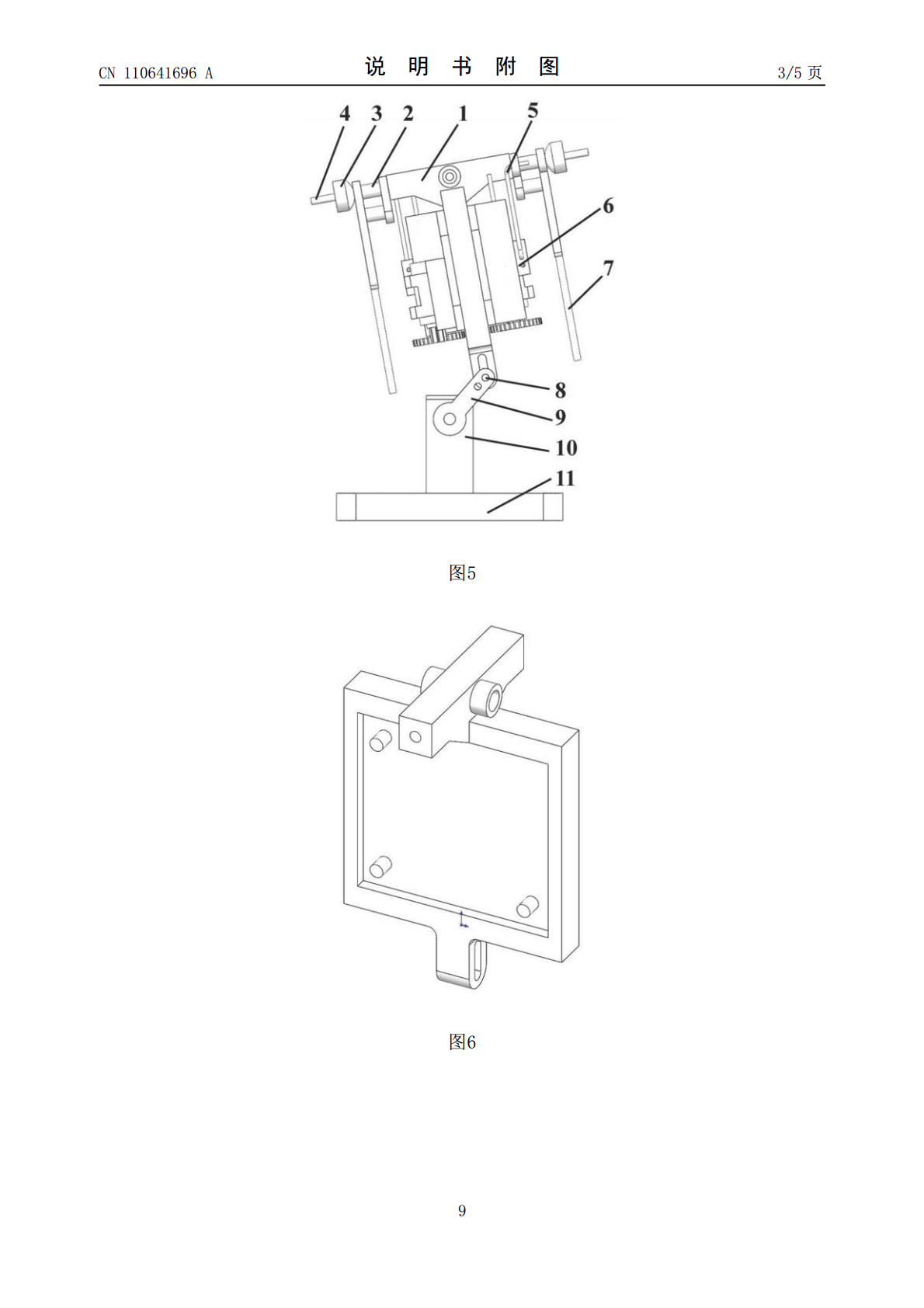
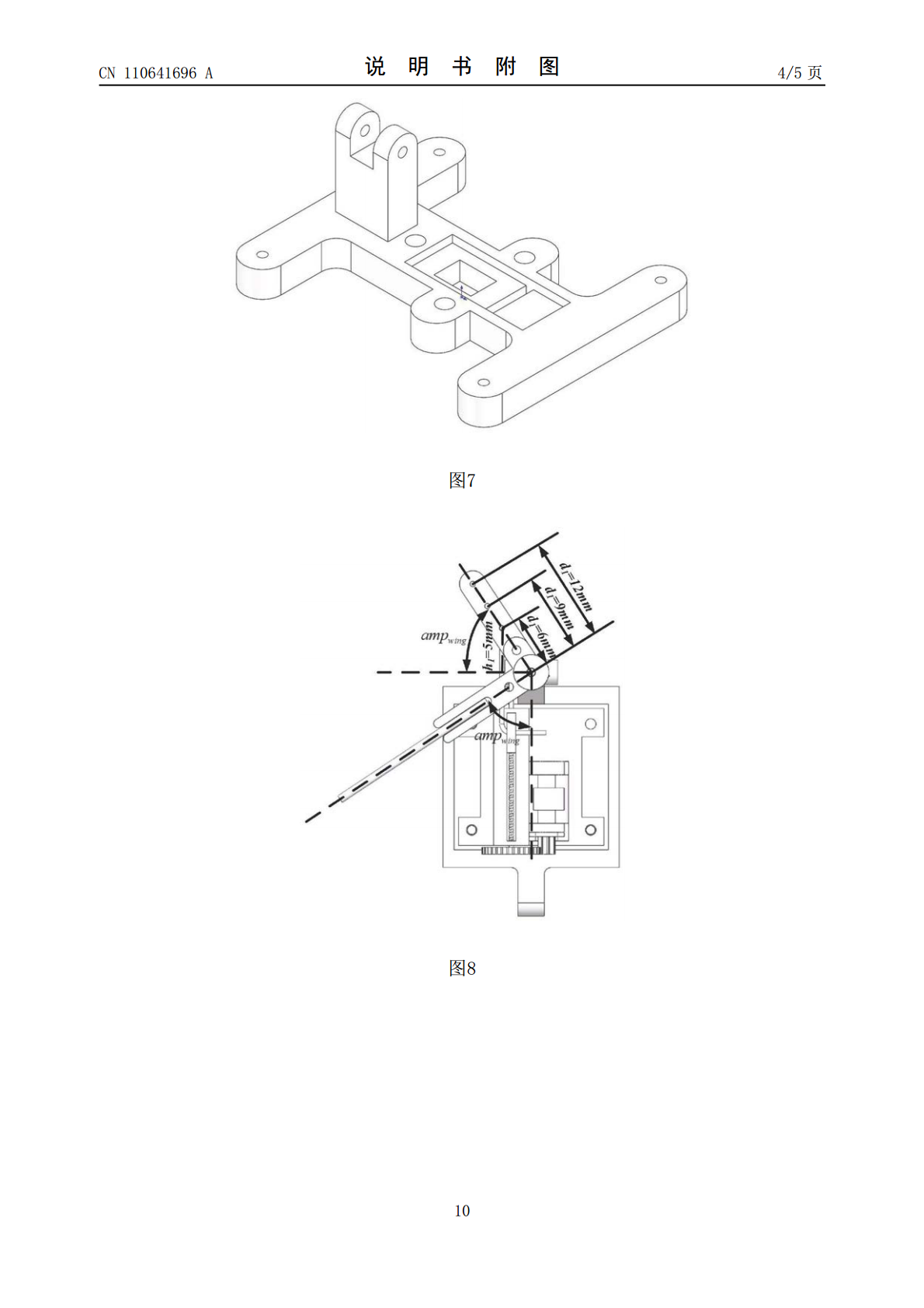
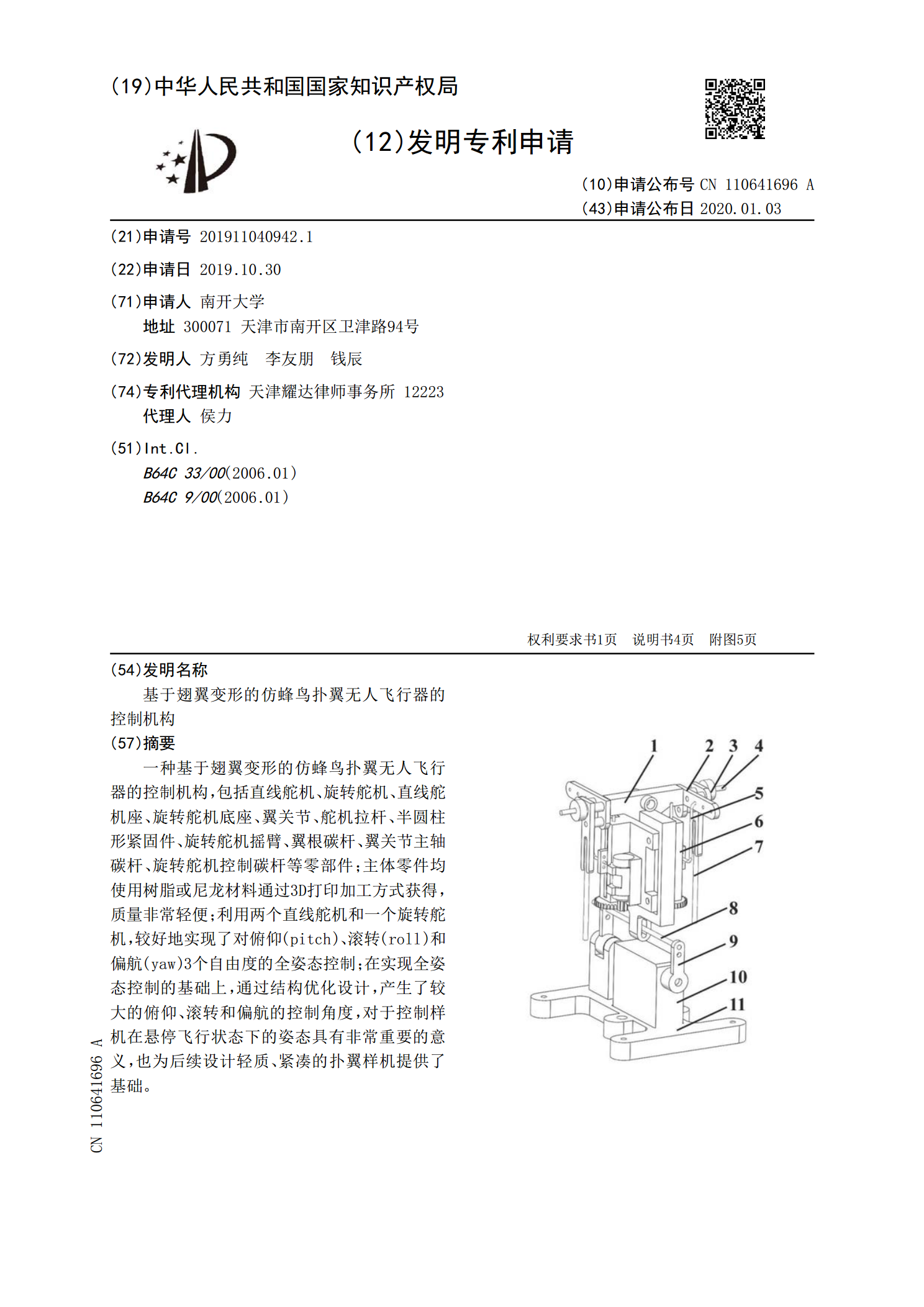
一种基于翅翼变形的仿蜂鸟扑翼无人飞行器的控制机构,包括直线舵机、旋转舵机、直线舵机座、旋转舵机底座、翼关节、舵机拉杆、半圆柱形紧固件、旋转舵机摇臂、翼根碳杆、翼关节主轴碳杆、旋转舵机控制碳杆等零部件;主体零件均使用树脂或尼龙材料通过3D打印加工方式获得,质量非常轻便;利用两个直线舵机和一个旋转舵机,较好地实现了对俯仰(pitch)、滚转(roll)和偏航(yaw)3个自由度的全姿态控制;在实现全姿态控制的基础上,通过结构优化设计,产生了较大的俯仰、滚转和偏航的控制角度,对于控制样机在悬停飞行状态下的姿态具

仿蜂鸟扑翼微飞行器.pdf
本发明公开一种仿生微飞行器领域的仿蜂鸟扑翼微飞行器,包括:机架、减速齿轮组、电机、传动机构、平行轴结构以及一对翅膀。其中机架上面直接装配减速齿轮组、电机和平行轴结构;传动机构装配在减速齿轮组和平行轴结构之间,用来将减速齿轮组输出的连续转动转化成平行轴的往复转动;一对翅膀装配在平行轴结构上面,从而实现自身的拍打运动,并与其他部分形成一个完整的扑翼微飞行器。本发明中两翅膀的拍打运动完全对称,很大程度上减小了振动对飞行器性能的影响,降低了飞行器的控制难度;同时,本发明结构简洁合理,便于加工,更便于进行改进以完成

基于齿轮齿条机构的仿蜂鸟扑翼机构.pdf
本发明实施例公开了一种基于齿轮齿条机构的仿蜂鸟扑翼机构,包括机架、电机、电池、飞行控制器、尾翼、一对机翼、扑动机构、飞行姿态控制机构,所述一对机翼对称设置在机架两侧,扑动机构、飞行姿态控制机、电机、电池、飞行控制器设于机架上;扑动机构采用齿轮齿条机构,驱动机翼做往复扑翼运动;飞行姿态控制机构由两个旋转舵机和一个电磁舵机组成,两个旋转舵机分别控制两个机翼的角度;电磁舵机控制尾翼的运动,实现扑翼机构的滚转。本发明结构简单、对称性好、容易加工制作、飞行姿态控制简单、可实现较大的扑动幅度。
一种基于连杆机构的仿蜂鸟扑翼无人飞行器的驱动机构.pdf
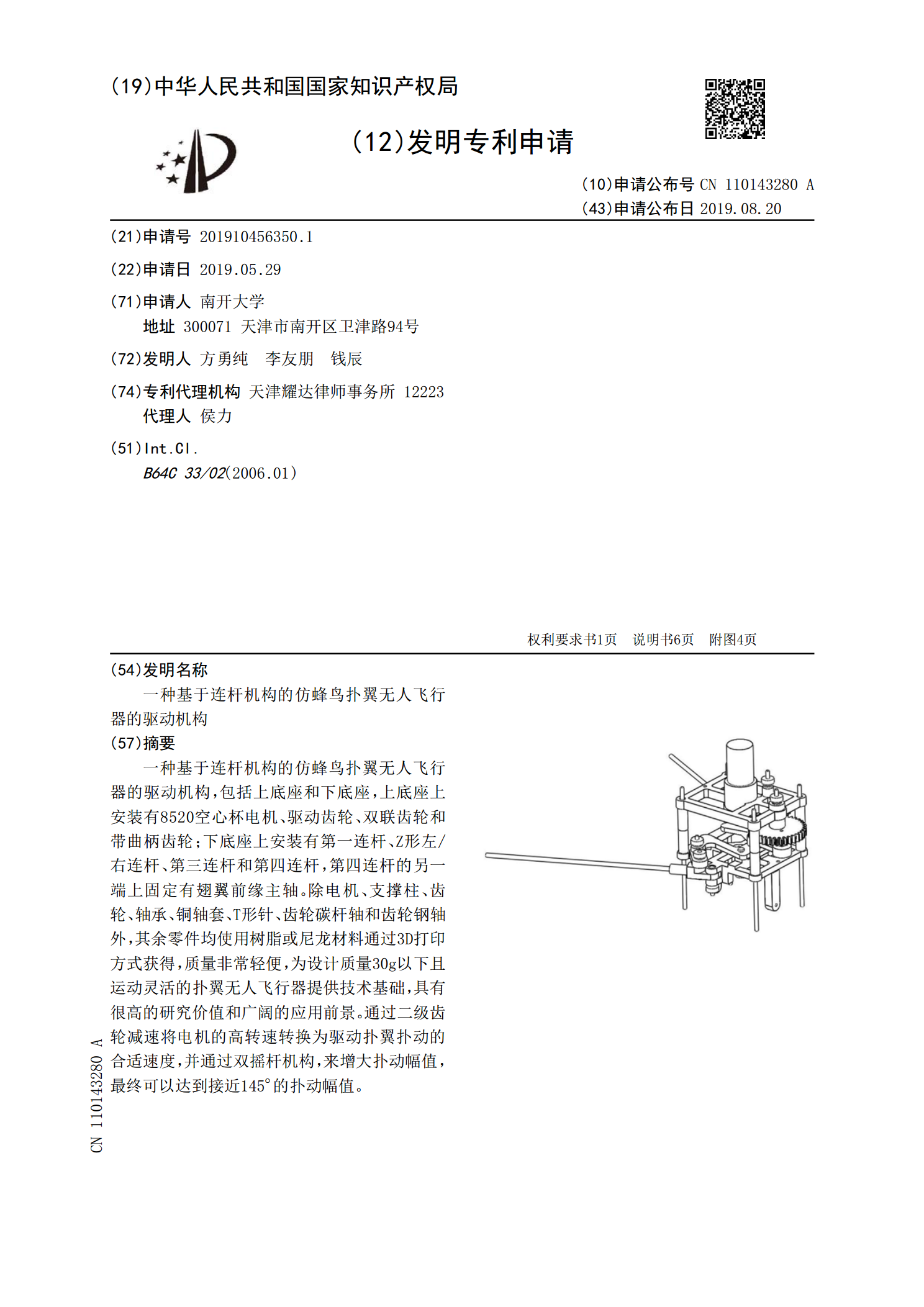
一种基于连杆机构的仿蜂鸟扑翼无人飞行器的驱动机构,包括上底座和下底座,上底座上安装有8520空心杯电机、驱动齿轮、双联齿轮和带曲柄齿轮;下底座上安装有第一连杆、Z形左/右连杆、第三连杆和第四连杆,第四连杆的另一端上固定有翅翼前缘主轴。除电机、支撑柱、齿轮、轴承、铜轴套、T形针、齿轮碳杆轴和齿轮钢轴外,其余零件均使用树脂或尼龙材料通过3D打印方式获得,质量非常轻便,为设计质量30g以下且运动灵活的扑翼无人飞行器提供技术基础,具有很高的研究价值和广阔的应用前景。通过二级齿轮减速将电机的高转速转换为驱动扑翼扑动
一种仿蜂鸟扑翼微型飞行器悬飞下翅翼的设计方法.pdf
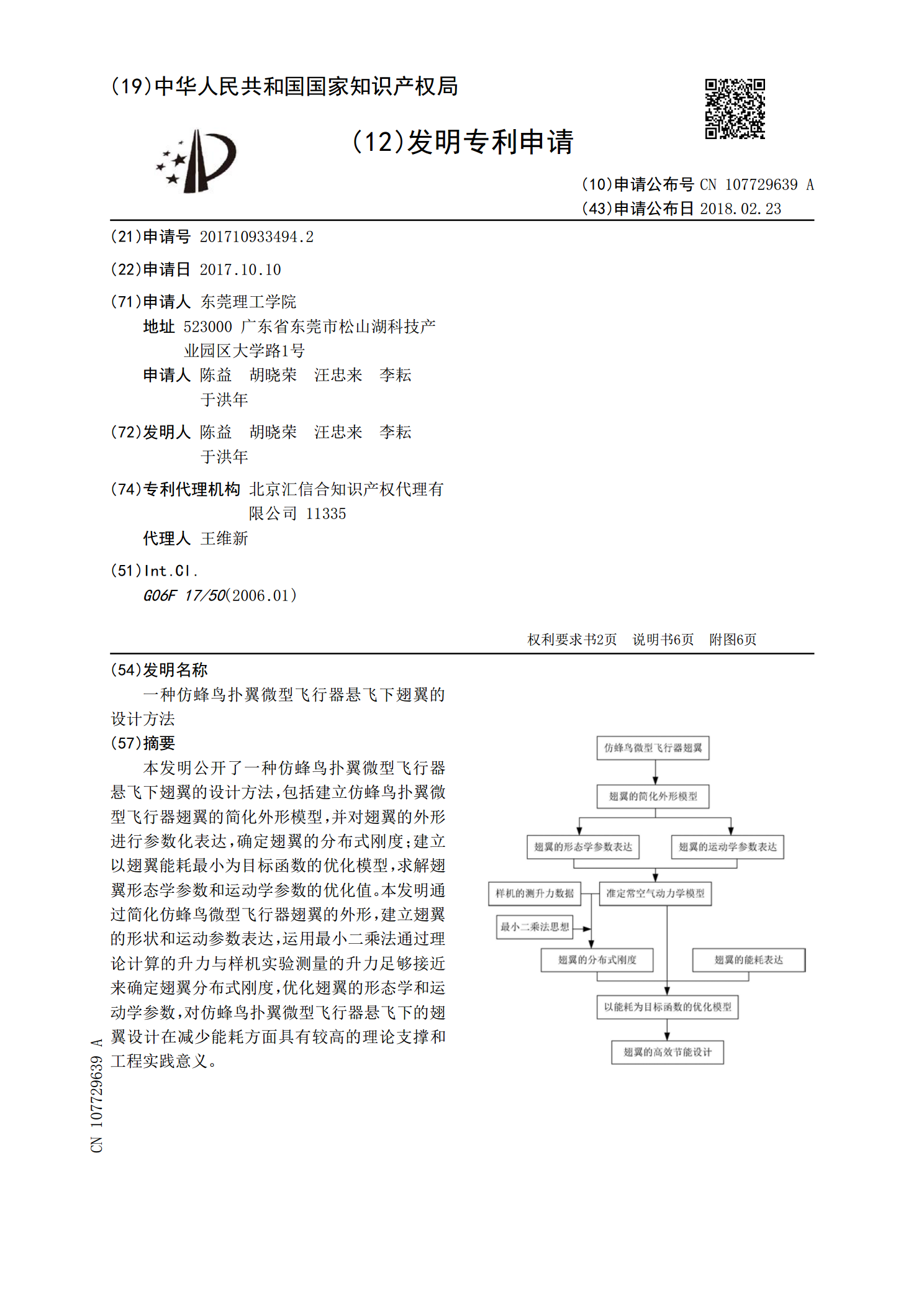
本发明公开了一种仿蜂鸟扑翼微型飞行器悬飞下翅翼的设计方法,包括建立仿蜂鸟扑翼微型飞行器翅翼的简化外形模型,并对翅翼的外形进行参数化表达,确定翅翼的分布式刚度;建立以翅翼能耗最小为目标函数的优化模型,求解翅翼形态学参数和运动学参数的优化值。本发明通过简化仿蜂鸟微型飞行器翅翼的外形,建立翅翼的形状和运动参数表达,运用最小二乘法通过理论计算的升力与样机实验测量的升力足够接近来确定翅翼分布式刚度,优化翅翼的形态学和运动学参数,对仿蜂鸟扑翼微型飞行器悬飞下的翅翼设计在减少能耗方面具有较高的理论支撑和工程实践意义。