
一种锻造业选料夹持搬运工业机器人.pdf

是丹****ni


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种锻造业选料夹持搬运工业机器人.pdf
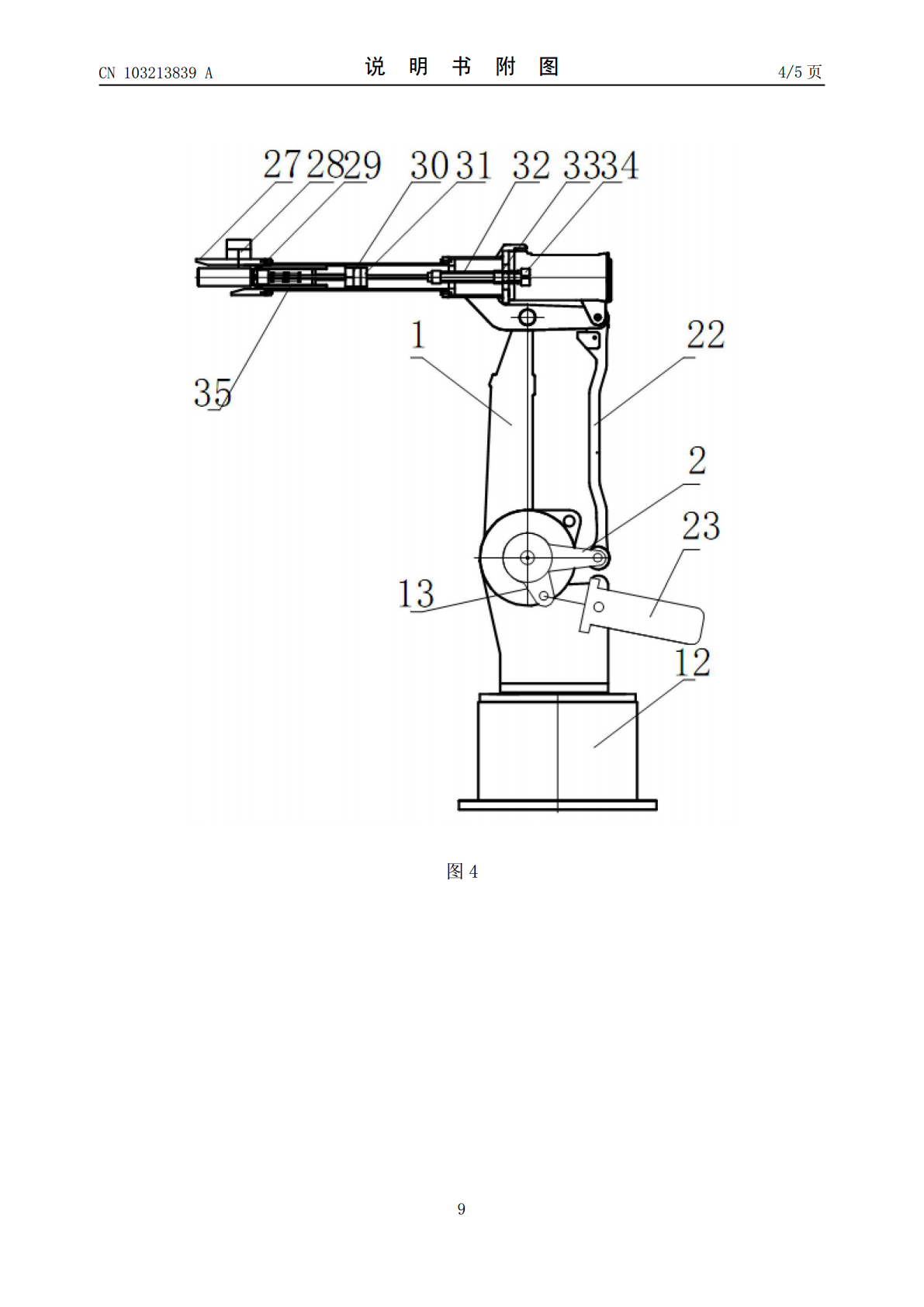
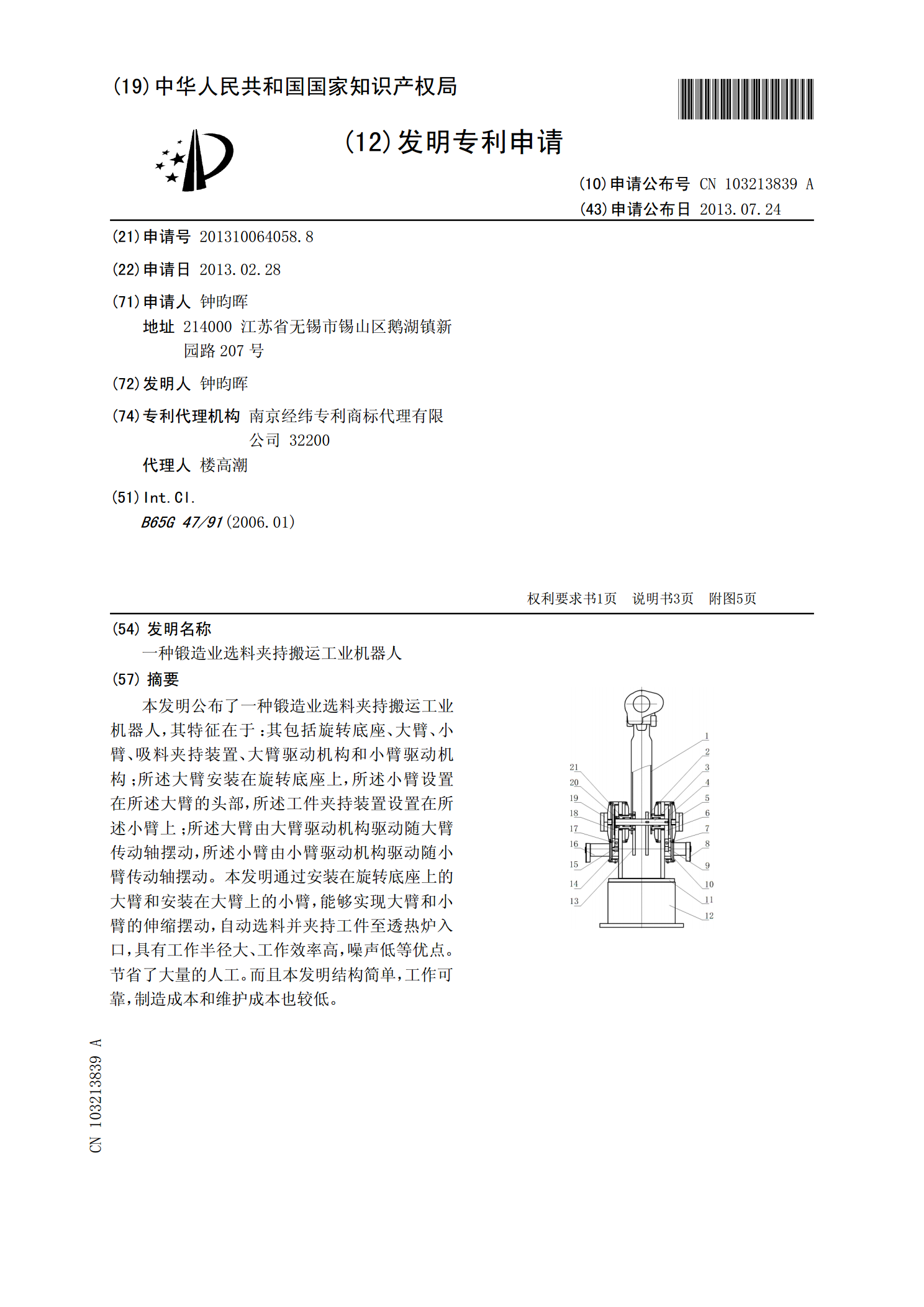
本发明公布了一种锻造业选料夹持搬运工业机器人,其特征在于:其包括旋转底座、大臂、小臂、吸料夹持装置、大臂驱动机构和小臂驱动机构;所述大臂安装在旋转底座上,所述小臂设置在所述大臂的头部,所述工件夹持装置设置在所述小臂上;所述大臂由大臂驱动机构驱动随大臂传动轴摆动,所述小臂由小臂驱动机构驱动随小臂传动轴摆动。本发明通过安装在旋转底座上的大臂和安装在大臂上的小臂,能够实现大臂和小臂的伸缩摆动,自动选料并夹持工件至透热炉入口,具有工作半径大、工作效率高,噪声低等优点。节省了大量的人工。而且本发明结构简单,工作可靠
一种便于工业搬运的机器人夹持装置.pdf
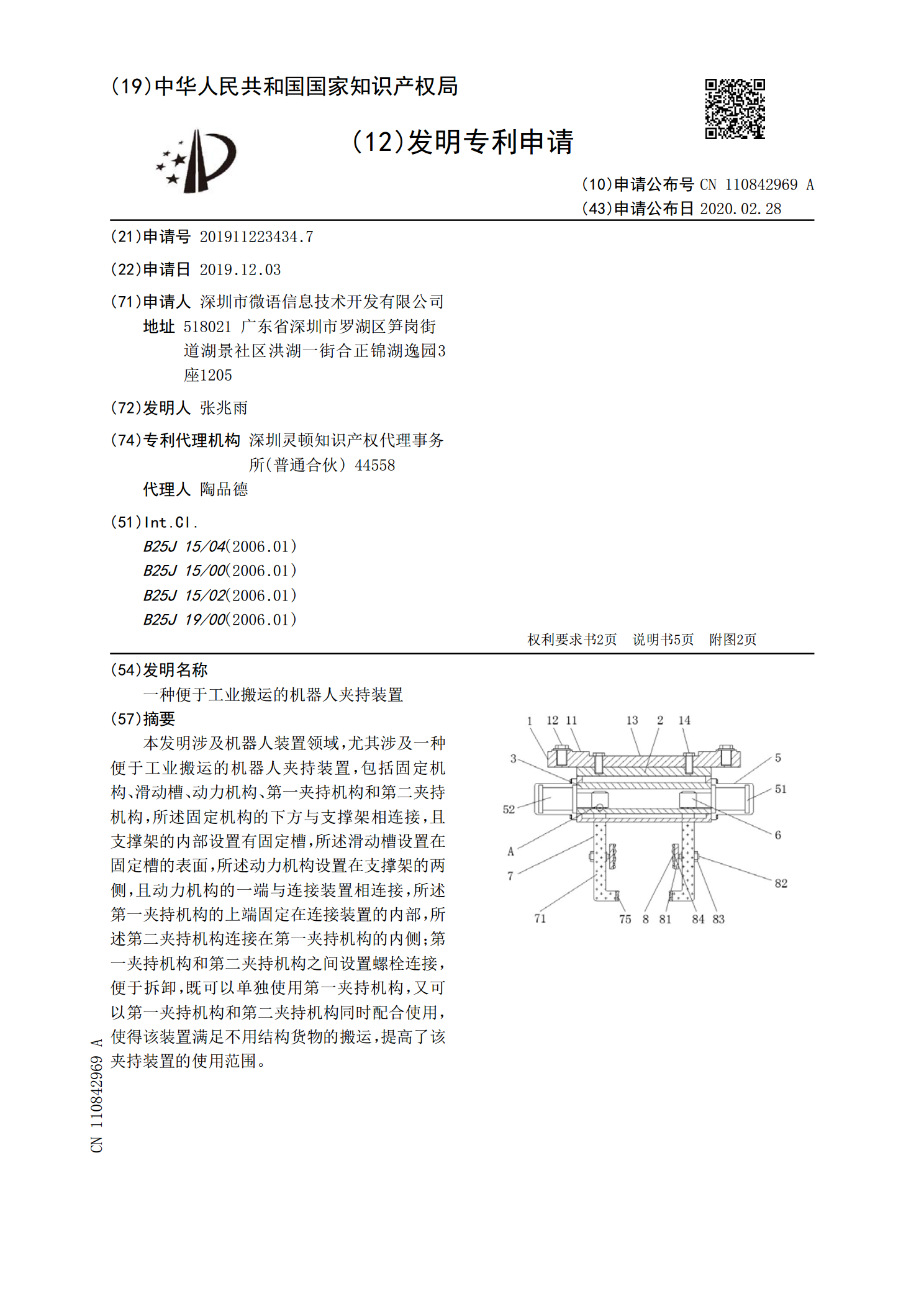
本发明涉及机器人装置领域,尤其涉及一种便于工业搬运的机器人夹持装置,包括固定机构、滑动槽、动力机构、第一夹持机构和第二夹持机构,所述固定机构的下方与支撑架相连接,且支撑架的内部设置有固定槽,所述滑动槽设置在固定槽的表面,所述动力机构设置在支撑架的两侧,且动力机构的一端与连接装置相连接,所述第一夹持机构的上端固定在连接装置的内部,所述第二夹持机构连接在第一夹持机构的内侧;第一夹持机构和第二夹持机构之间设置螺栓连接,便于拆卸,既可以单独使用第一夹持机构,又可以第一夹持机构和第二夹持机构同时配合使用,使得该装置
一种夹持式搬运机器人.pdf
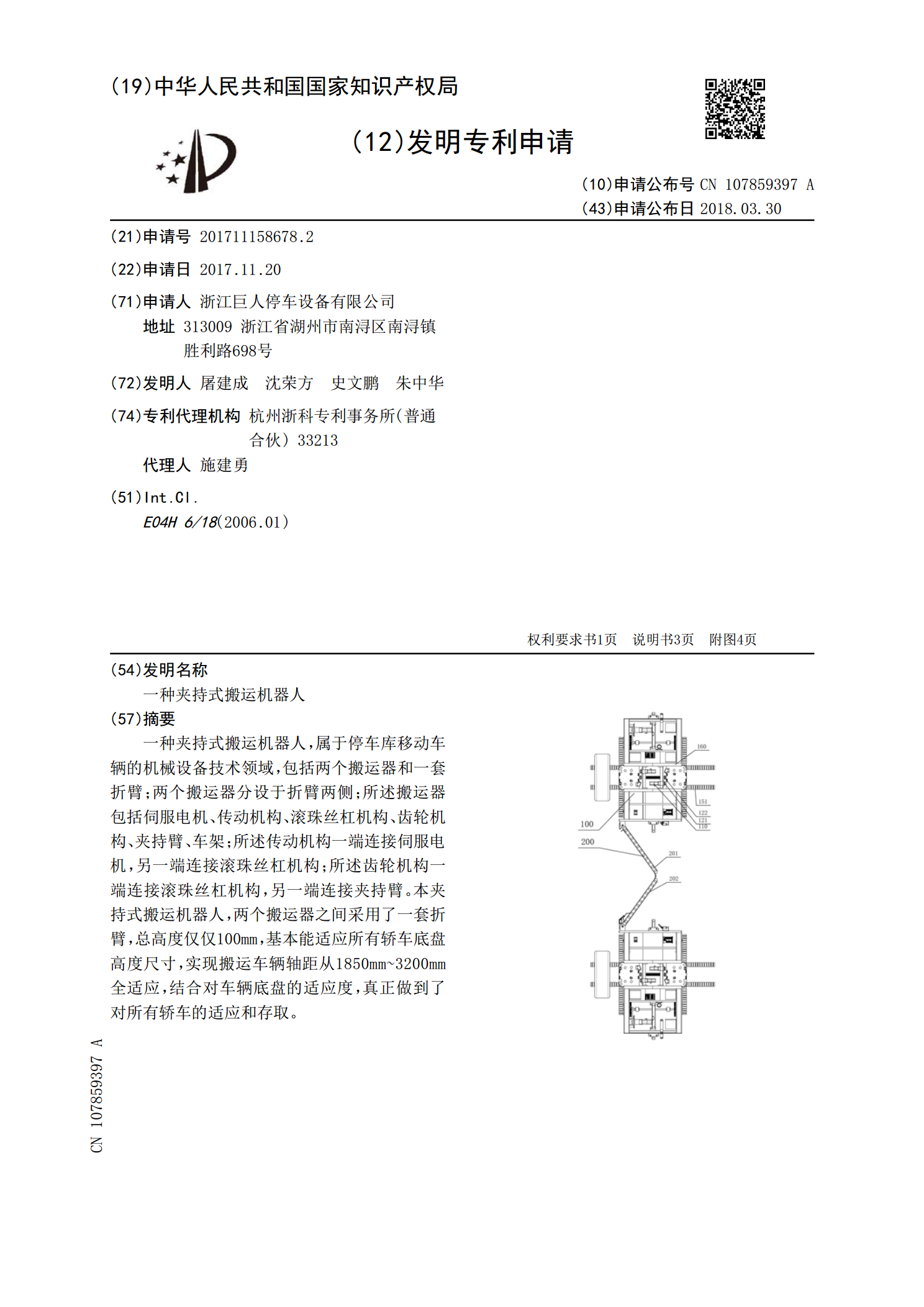
一种夹持式搬运机器人,属于停车库移动车辆的机械设备技术领域,包括两个搬运器和一套折臂;两个搬运器分设于折臂两侧;所述搬运器包括伺服电机、传动机构、滚珠丝杠机构、齿轮机构、夹持臂、车架;所述传动机构一端连接伺服电机,另一端连接滚珠丝杠机构;所述齿轮机构一端连接滚珠丝杠机构,另一端连接夹持臂。本夹持式搬运机器人,两个搬运器之间采用了一套折臂,总高度仅仅100mm,基本能适应所有轿车底盘高度尺寸,实现搬运车辆轴距从1850mm~3200mm全适应,结合对车辆底盘的适应度,真正做到了对所有轿车的适应和存取。
一种夹持式搬运机器人.pdf
本发明涉及搬运机器人技术领域,尤其是一种夹持式搬运机器人,包括机器人底座,所述机器人底座底面设有移动机构,所述机器人底座表面中部固定连接有方形支柱,每个所述滑槽内滑动安装有U形运料板,所述U形运料板上设有夹持装置,所述导向轮一侧均设有收绳辊底座,所述收绳辊底座上均转动连接有收绳辊,每个所述收绳辊一端均固定连接有第一伺服电机,所述收绳辊固定连接有钢绳,所述方形支柱内部设有蓄电池、遥控接收器和PLC控制器。本发明方便运输产品,可将产品省力搬运到货车内。

一种自适应夹持搬运机器人.pdf
本发明公开了一种自适应夹持搬运机器人,包括轮式底盘和设置于所述轮式底盘上的机械臂,以及由所述机械臂带动的夹持装置;所述夹持装置包括由导磁材料制作的Π型的架体,面板和接触杆组件;所述架体包括两侧板和固定于两侧板之间的连接板;所述连接板上缠绕有励磁线圈,侧板通过连接柱固定与其平行的所述面板;所述面板与侧板之间设有气缸和固定于气缸活塞杆外端的推板;本机器人能够适应不同外形结构的物品,当物品或工件尺寸发生变化时,夹持装置能够主动做出变化以适应不同不同外形工件,并且在夹持工件时,夹持装置稳定性较高。