
一种夹持式搬运机器人.pdf

一吃****继勇


1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种夹持式搬运机器人.pdf
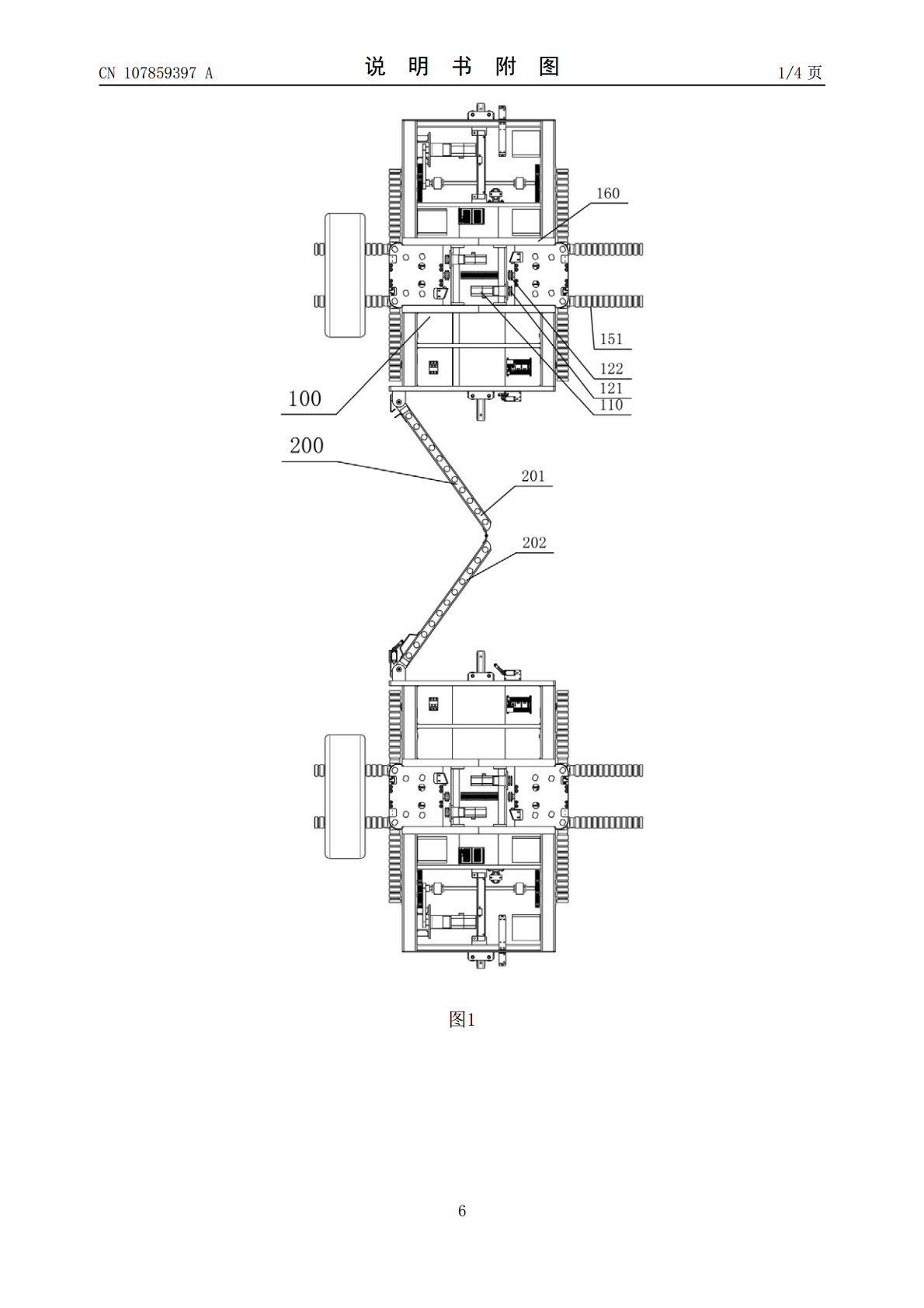
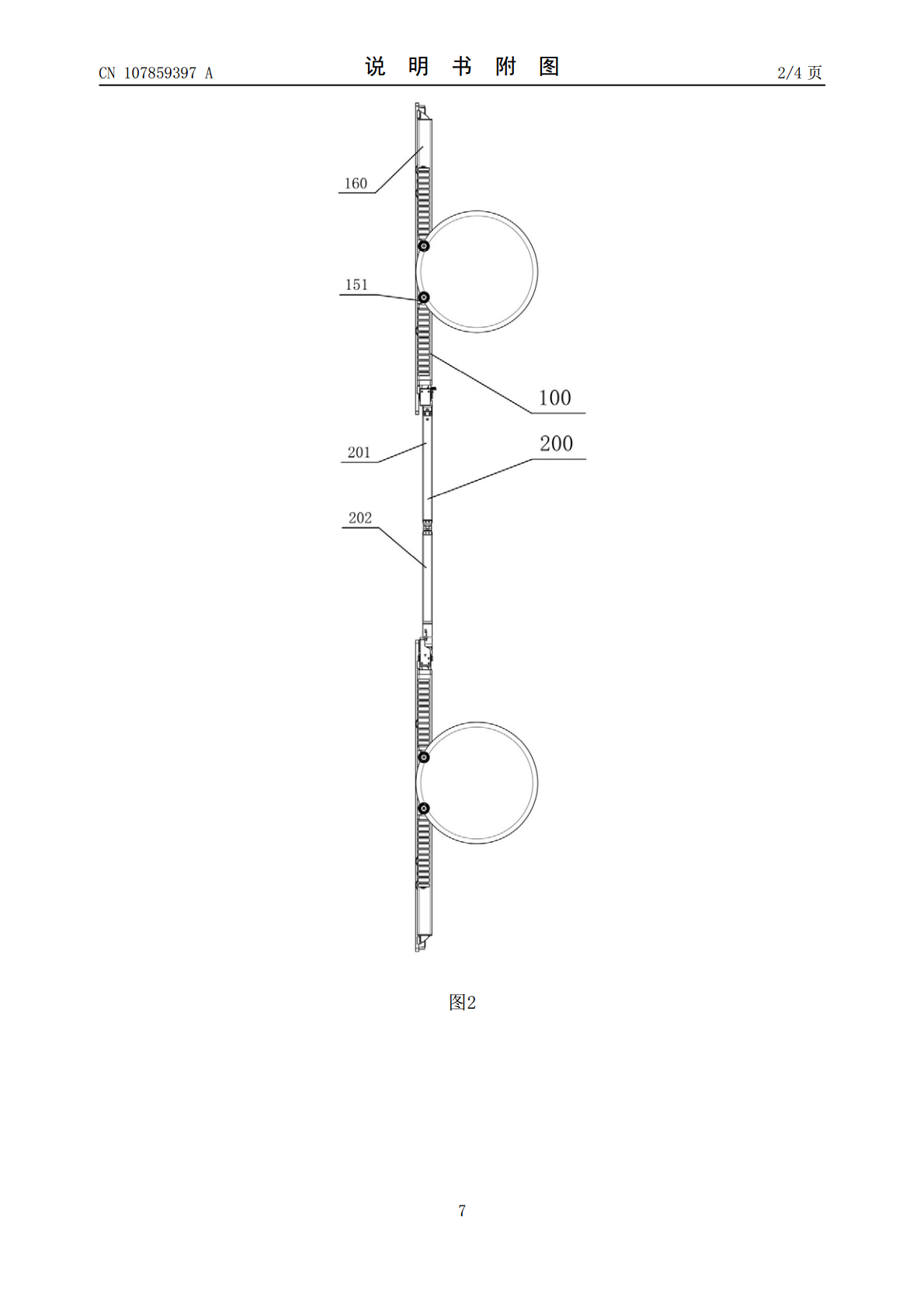
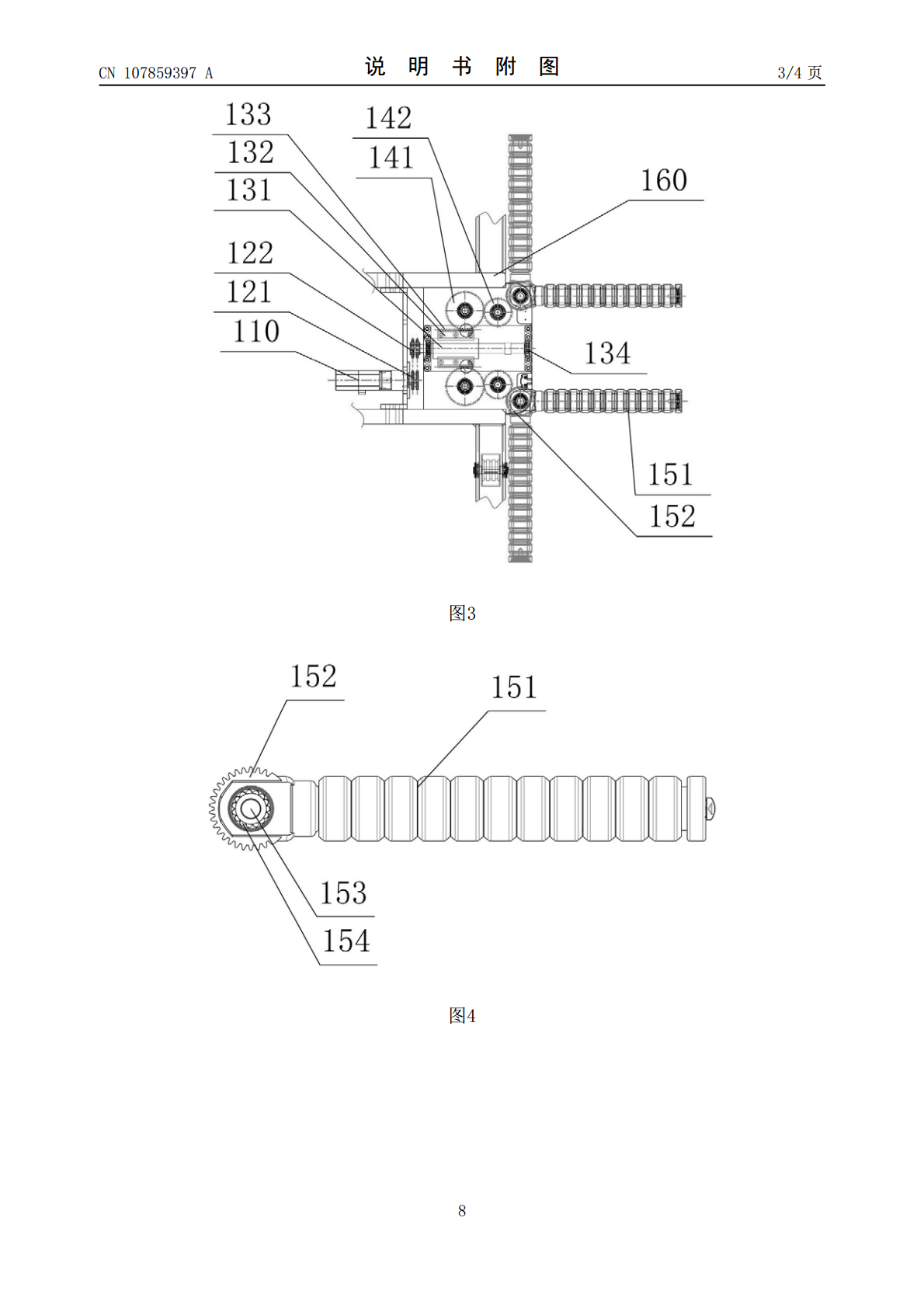
一种夹持式搬运机器人,属于停车库移动车辆的机械设备技术领域,包括两个搬运器和一套折臂;两个搬运器分设于折臂两侧;所述搬运器包括伺服电机、传动机构、滚珠丝杠机构、齿轮机构、夹持臂、车架;所述传动机构一端连接伺服电机,另一端连接滚珠丝杠机构;所述齿轮机构一端连接滚珠丝杠机构,另一端连接夹持臂。本夹持式搬运机器人,两个搬运器之间采用了一套折臂,总高度仅仅100mm,基本能适应所有轿车底盘高度尺寸,实现搬运车辆轴距从1850mm~3200mm全适应,结合对车辆底盘的适应度,真正做到了对所有轿车的适应和存取。
一种夹持式搬运机器人.pdf
本发明涉及搬运机器人技术领域,尤其是一种夹持式搬运机器人,包括机器人底座,所述机器人底座底面设有移动机构,所述机器人底座表面中部固定连接有方形支柱,每个所述滑槽内滑动安装有U形运料板,所述U形运料板上设有夹持装置,所述导向轮一侧均设有收绳辊底座,所述收绳辊底座上均转动连接有收绳辊,每个所述收绳辊一端均固定连接有第一伺服电机,所述收绳辊固定连接有钢绳,所述方形支柱内部设有蓄电池、遥控接收器和PLC控制器。本发明方便运输产品,可将产品省力搬运到货车内。
立体车库搬运夹持机构及其应用的夹持式搬运机器人.pdf
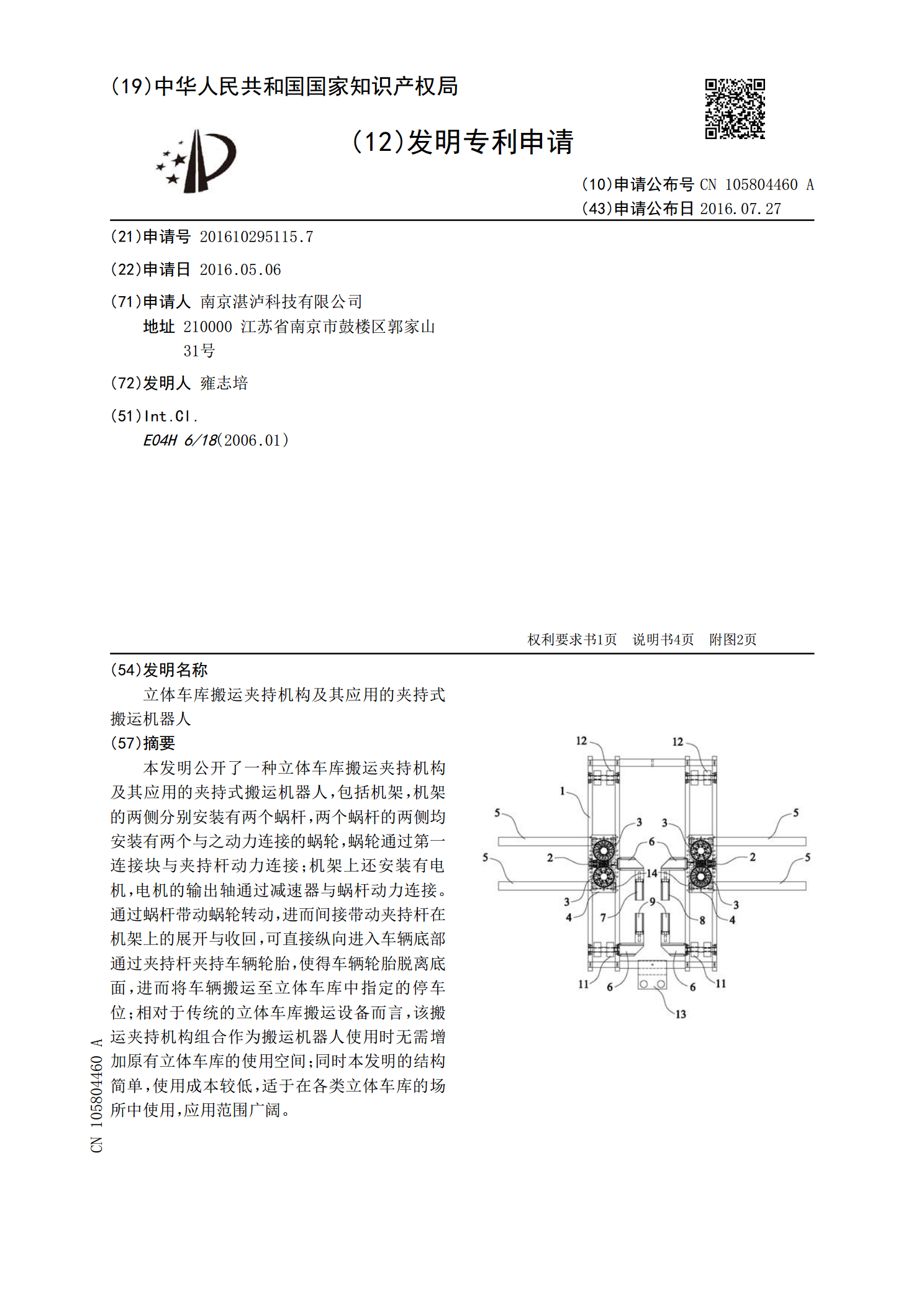
本发明公开了一种立体车库搬运夹持机构及其应用的夹持式搬运机器人,包括机架,机架的两侧分别安装有两个蜗杆,两个蜗杆的两侧均安装有两个与之动力连接的蜗轮,蜗轮通过第一连接块与夹持杆动力连接;机架上还安装有电机,电机的输出轴通过减速器与蜗杆动力连接。通过蜗杆带动蜗轮转动,进而间接带动夹持杆在机架上的展开与收回,可直接纵向进入车辆底部通过夹持杆夹持车辆轮胎,使得车辆轮胎脱离底面,进而将车辆搬运至立体车库中指定的停车位;相对于传统的立体车库搬运设备而言,该搬运夹持机构组合作为搬运机器人使用时无需增加原有立体车库的使

一种夹持式搬运器.pdf
本申请提供了一种夹持式搬运器,包括:框架、驱动装置、夹持装置、承载装置,所述驱动装置安装在所述框架的前后两端,所述夹持装置安装在所述框架的左右两侧,所述承载装置安装在所述夹持装置的下侧。本申请结构简单、运行稳定,维修成本较低并且能够减小车辆轮胎的磨损,安全性大大提升。
一种超薄夹持式搬运器.pdf
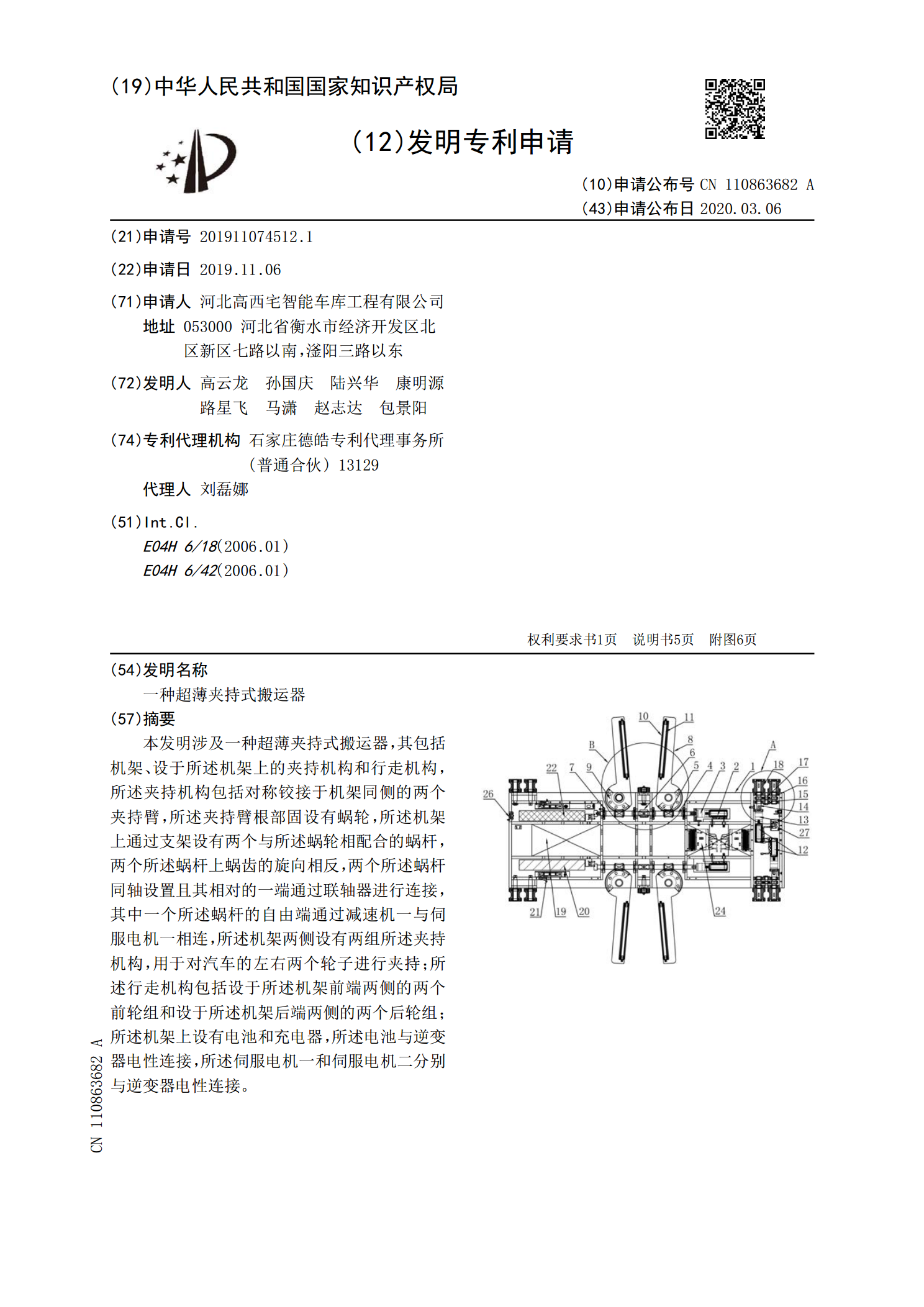
本发明涉及一种超薄夹持式搬运器,其包括机架、设于所述机架上的夹持机构和行走机构,所述夹持机构包括对称铰接于机架同侧的两个夹持臂,所述夹持臂根部固设有蜗轮,所述机架上通过支架设有两个与所述蜗轮相配合的蜗杆,两个所述蜗杆上蜗齿的旋向相反,两个所述蜗杆同轴设置且其相对的一端通过联轴器进行连接,其中一个所述蜗杆的自由端通过减速机一与伺服电机一相连,所述机架两侧设有两组所述夹持机构,用于对汽车的左右两个轮子进行夹持;所述行走机构包括设于所述机架前端两侧的两个前轮组和设于所述机架后端两侧的两个后轮组;所述机架上设有电