
一种便于工业搬运的机器人夹持装置.pdf

努力****弘毅

1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种便于工业搬运的机器人夹持装置.pdf
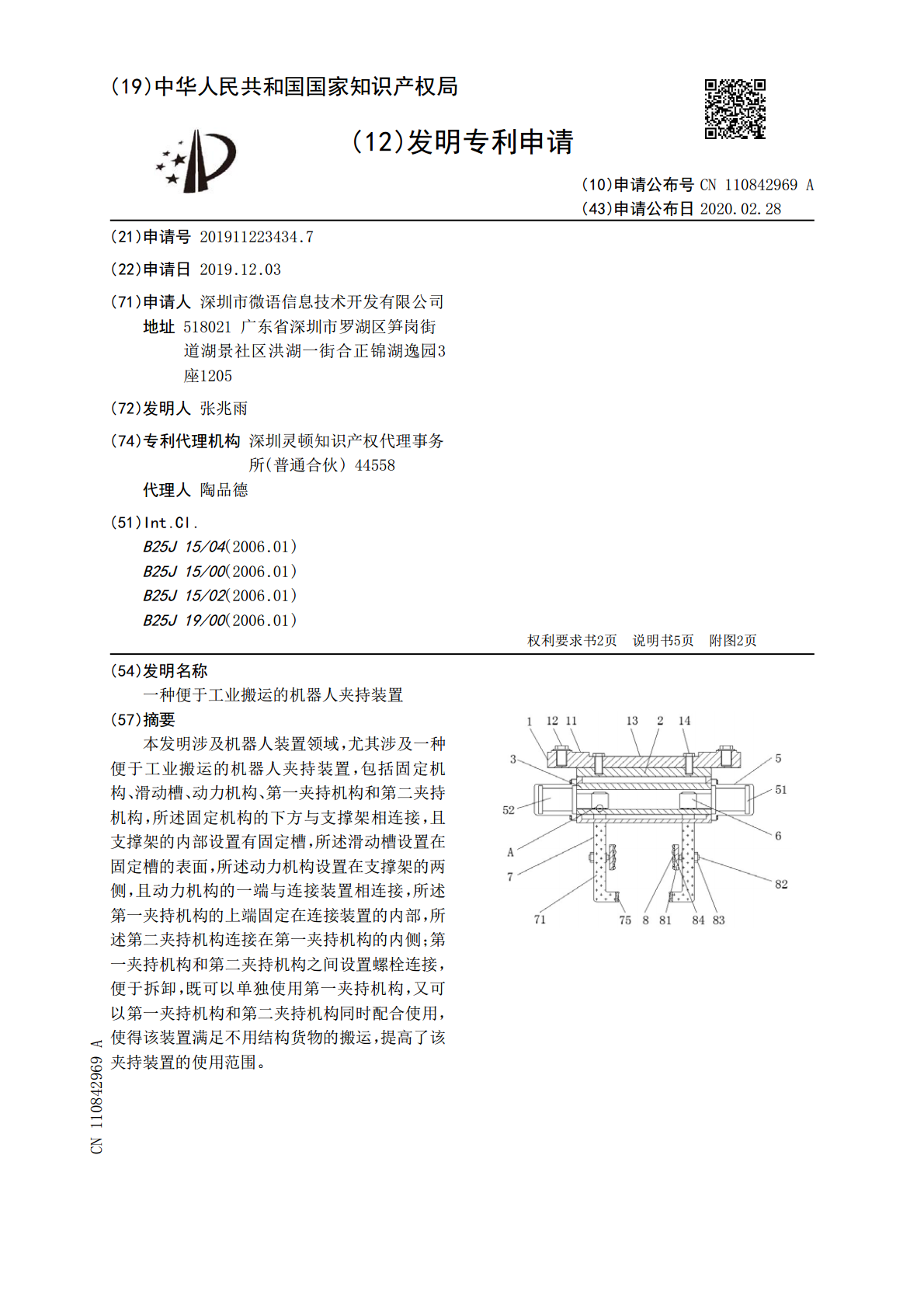
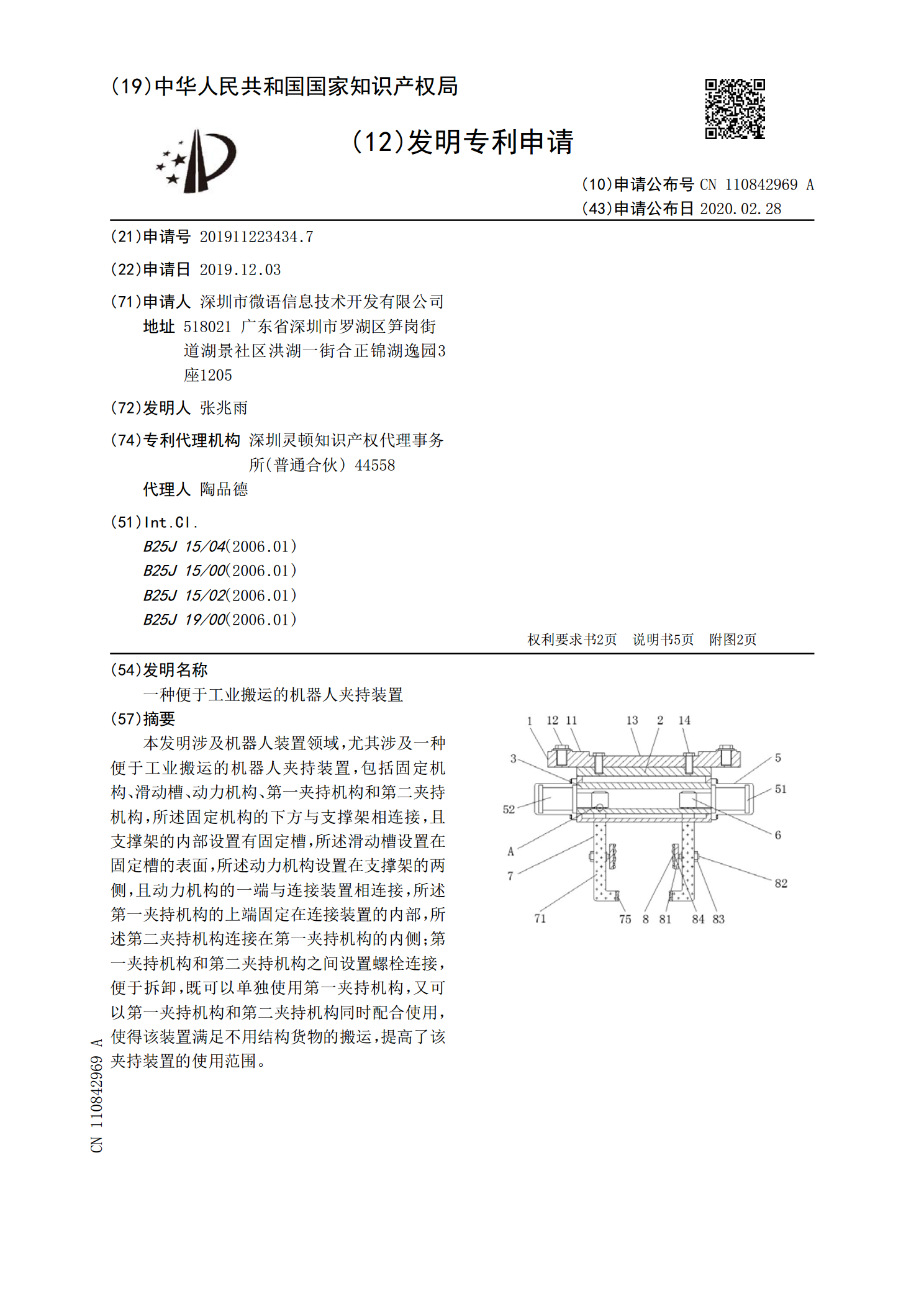
本发明涉及机器人装置领域,尤其涉及一种便于工业搬运的机器人夹持装置,包括固定机构、滑动槽、动力机构、第一夹持机构和第二夹持机构,所述固定机构的下方与支撑架相连接,且支撑架的内部设置有固定槽,所述滑动槽设置在固定槽的表面,所述动力机构设置在支撑架的两侧,且动力机构的一端与连接装置相连接,所述第一夹持机构的上端固定在连接装置的内部,所述第二夹持机构连接在第一夹持机构的内侧;第一夹持机构和第二夹持机构之间设置螺栓连接,便于拆卸,既可以单独使用第一夹持机构,又可以第一夹持机构和第二夹持机构同时配合使用,使得该装置
一种搬运机器人机械臂的夹持装置.pdf
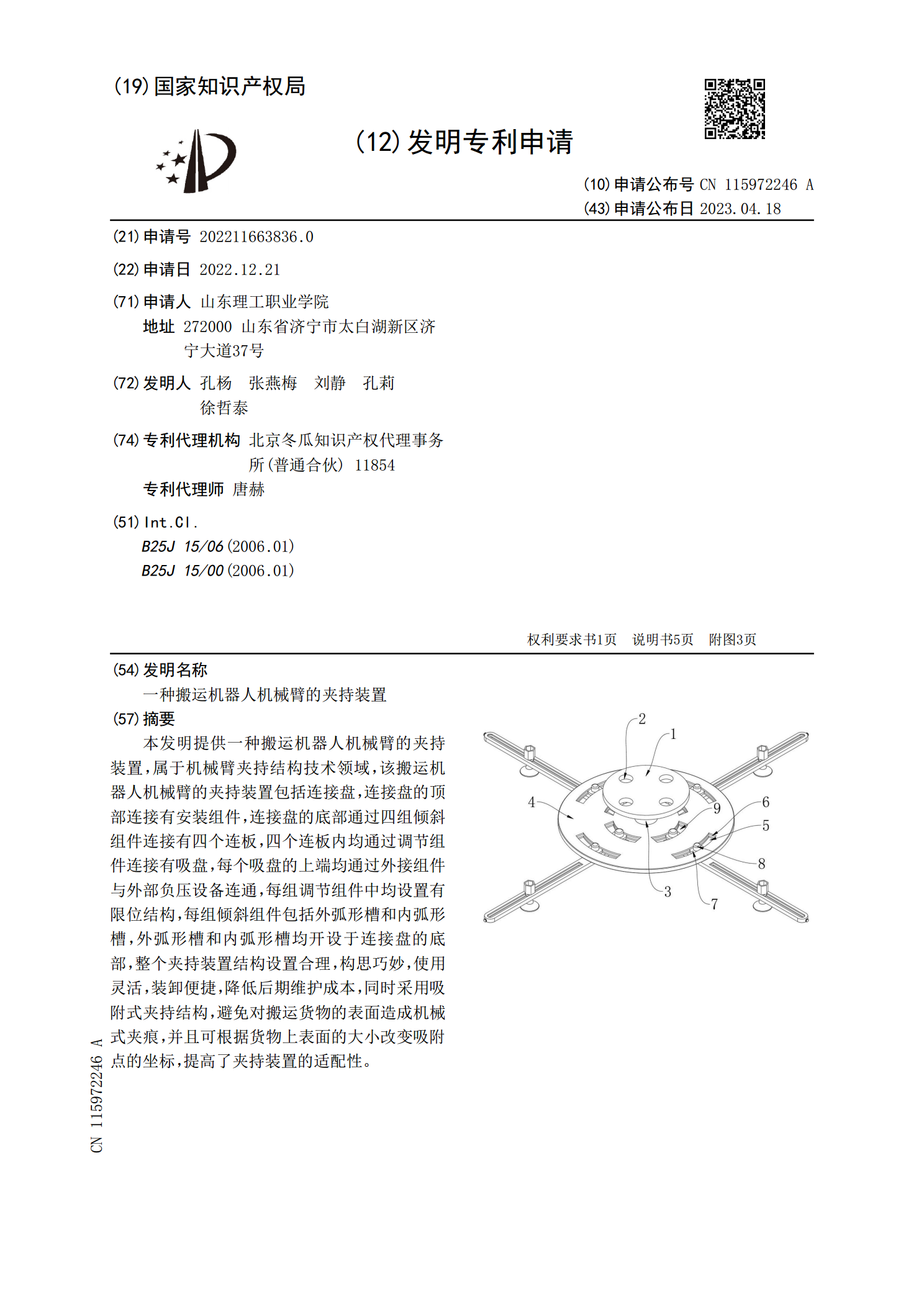
本发明提供一种搬运机器人机械臂的夹持装置,属于机械臂夹持结构技术领域,该搬运机器人机械臂的夹持装置包括连接盘,连接盘的顶部连接有安装组件,连接盘的底部通过四组倾斜组件连接有四个连板,四个连板内均通过调节组件连接有吸盘,每个吸盘的上端均通过外接组件与外部负压设备连通,每组调节组件中均设置有限位结构,每组倾斜组件包括外弧形槽和内弧形槽,外弧形槽和内弧形槽均开设于连接盘的底部,整个夹持装置结构设置合理,构思巧妙,使用灵活,装卸便捷,降低后期维护成本,同时采用吸附式夹持结构,避免对搬运货物的表面造成机械式夹痕,并
一种搬运机器人机械臂的夹持装置.pdf
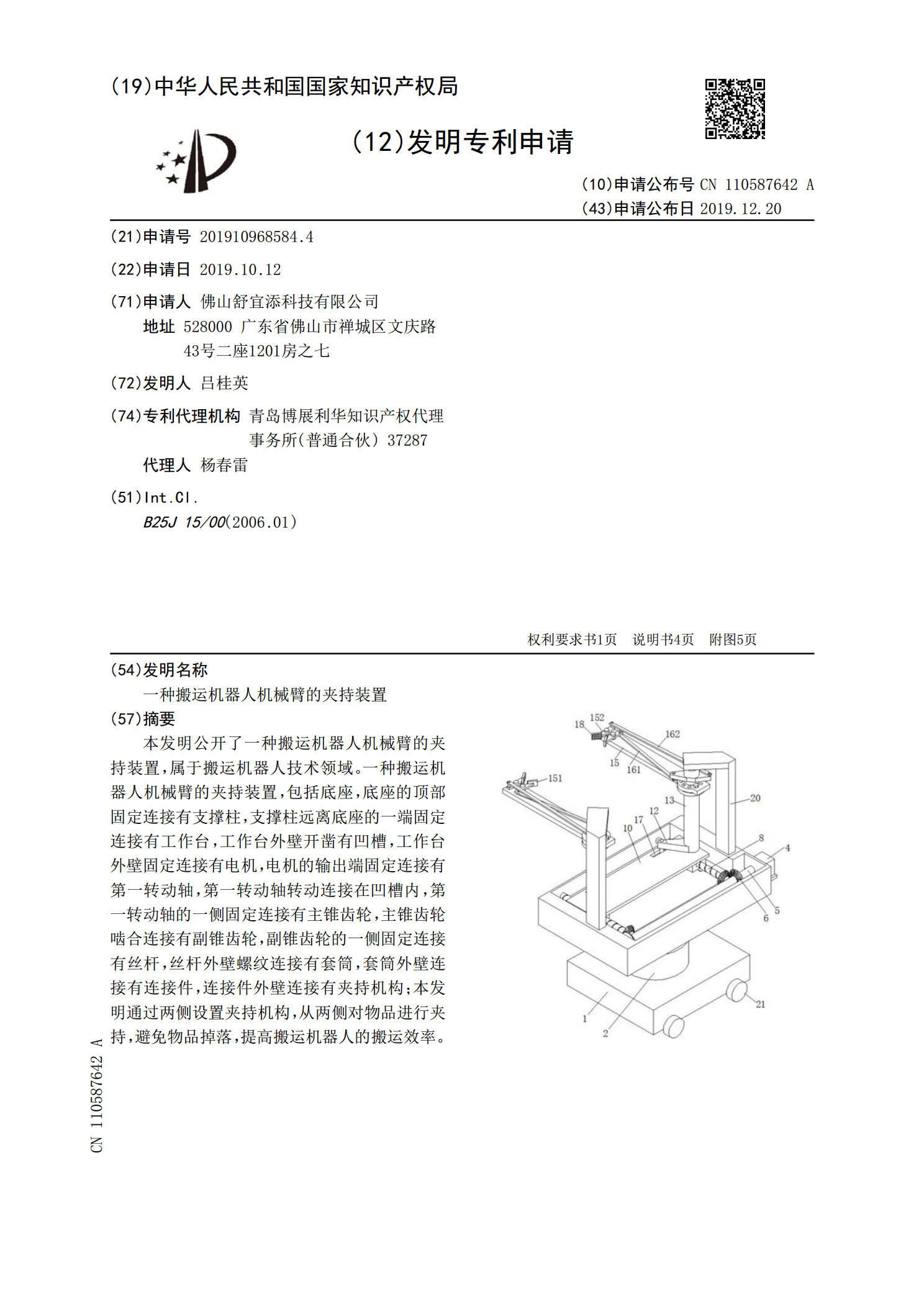
本发明公开了一种搬运机器人机械臂的夹持装置,属于搬运机器人技术领域。一种搬运机器人机械臂的夹持装置,包括底座,底座的顶部固定连接有支撑柱,支撑柱远离底座的一端固定连接有工作台,工作台外壁开凿有凹槽,工作台外壁固定连接有电机,电机的输出端固定连接有第一转动轴,第一转动轴转动连接在凹槽内,第一转动轴的一侧固定连接有主锥齿轮,主锥齿轮啮合连接有副锥齿轮,副锥齿轮的一侧固定连接有丝杆,丝杆外壁螺纹连接有套筒,套筒外壁连接有连接件,连接件外壁连接有夹持机构;本发明通过两侧设置夹持机构,从两侧对物品进行夹持,避免物品
一种工业机器人的夹持装置.pdf
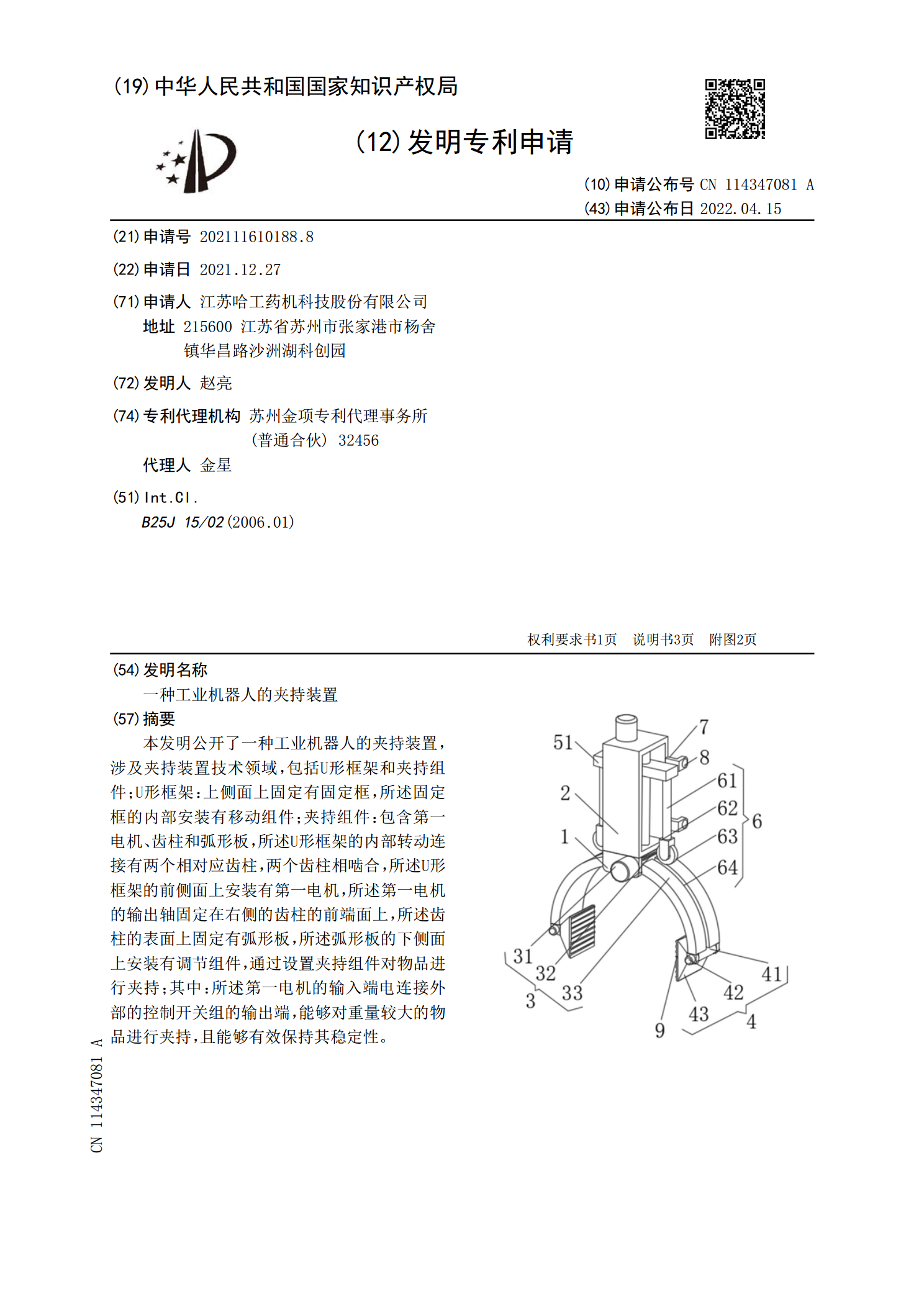
本发明公开了一种工业机器人的夹持装置,涉及夹持装置技术领域,包括U形框架和夹持组件;U形框架:上侧面上固定有固定框,所述固定框的内部安装有移动组件;夹持组件:包含第一电机、齿柱和弧形板,所述U形框架的内部转动连接有两个相对应齿柱,两个齿柱相啮合,所述U形框架的前侧面上安装有第一电机,所述第一电机的输出轴固定在右侧的齿柱的前端面上,所述齿柱的表面上固定有弧形板,所述弧形板的下侧面上安装有调节组件,通过设置夹持组件对物品进行夹持;其中:所述第一电机的输入端电连接外部的控制开关组的输出端,能够对重量较大的物品进
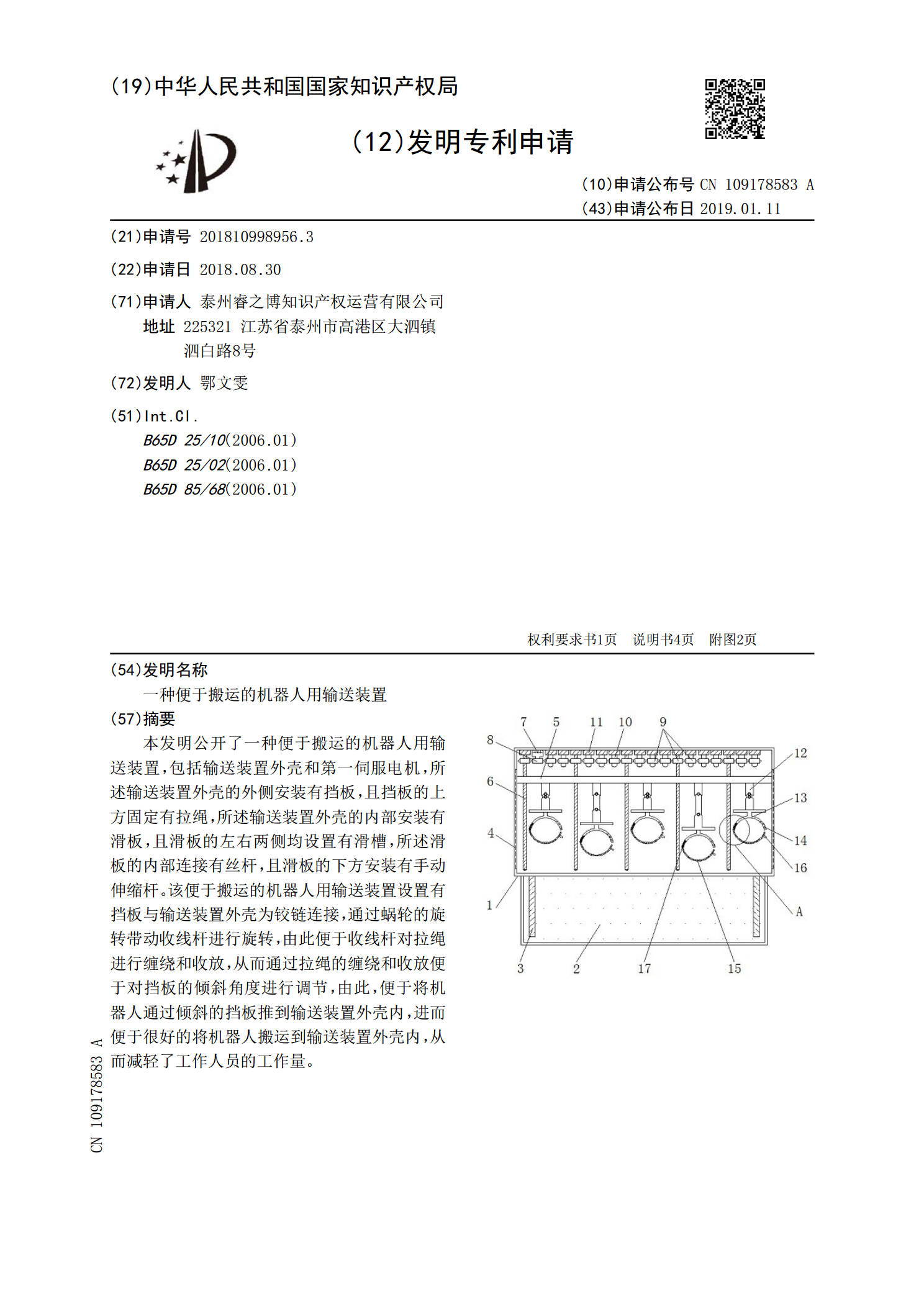
一种便于搬运的机器人用输送装置.pdf
本发明公开了一种便于搬运的机器人用输送装置,包括输送装置外壳和第一伺服电机,所述输送装置外壳的外侧安装有挡板,且挡板的上方固定有拉绳,所述输送装置外壳的内部安装有滑板,且滑板的左右两侧均设置有滑槽,所述滑板的内部连接有丝杆,且滑板的下方安装有手动伸缩杆。该便于搬运的机器人用输送装置设置有挡板与输送装置外壳为铰链连接,通过蜗轮的旋转带动收线杆进行旋转,由此便于收线杆对拉绳进行缠绕和收放,从而通过拉绳的缠绕和收放便于对挡板的倾斜角度进行调节,由此,便于将机器人通过倾斜的挡板推到输送装置外壳内,进而便于很好的将