
适用于具有风口结构炉体的巡检方法及其智能巡检系统.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

适用于具有风口结构炉体的巡检方法及其智能巡检系统.pdf
本发明公开了一种适用于具有风口结构炉体的巡检方法及其巡检系统,该方法通过随小车绕炉体作圆周运动的过程中进行炉体温度检测、炉体风口处温度检测、CO浓度检测、高频噪声检测、检测信息分析和报警多个步骤实现;对应巡检系统包括设置在现场的智能行走机器人、充电站和多个无线基站,以及设置在中控室内的工控机;该巡检系统及方法通过对炉体及其风口区域的表面温度、CO浓度、高频噪音三种能够有效评价炉体尤其风口处的关键监测信息进行检测和分析,以实现炉体尤其风口设备损伤情况的监测目的,又有利于提前对设备进行合理预检预修,提升生产作
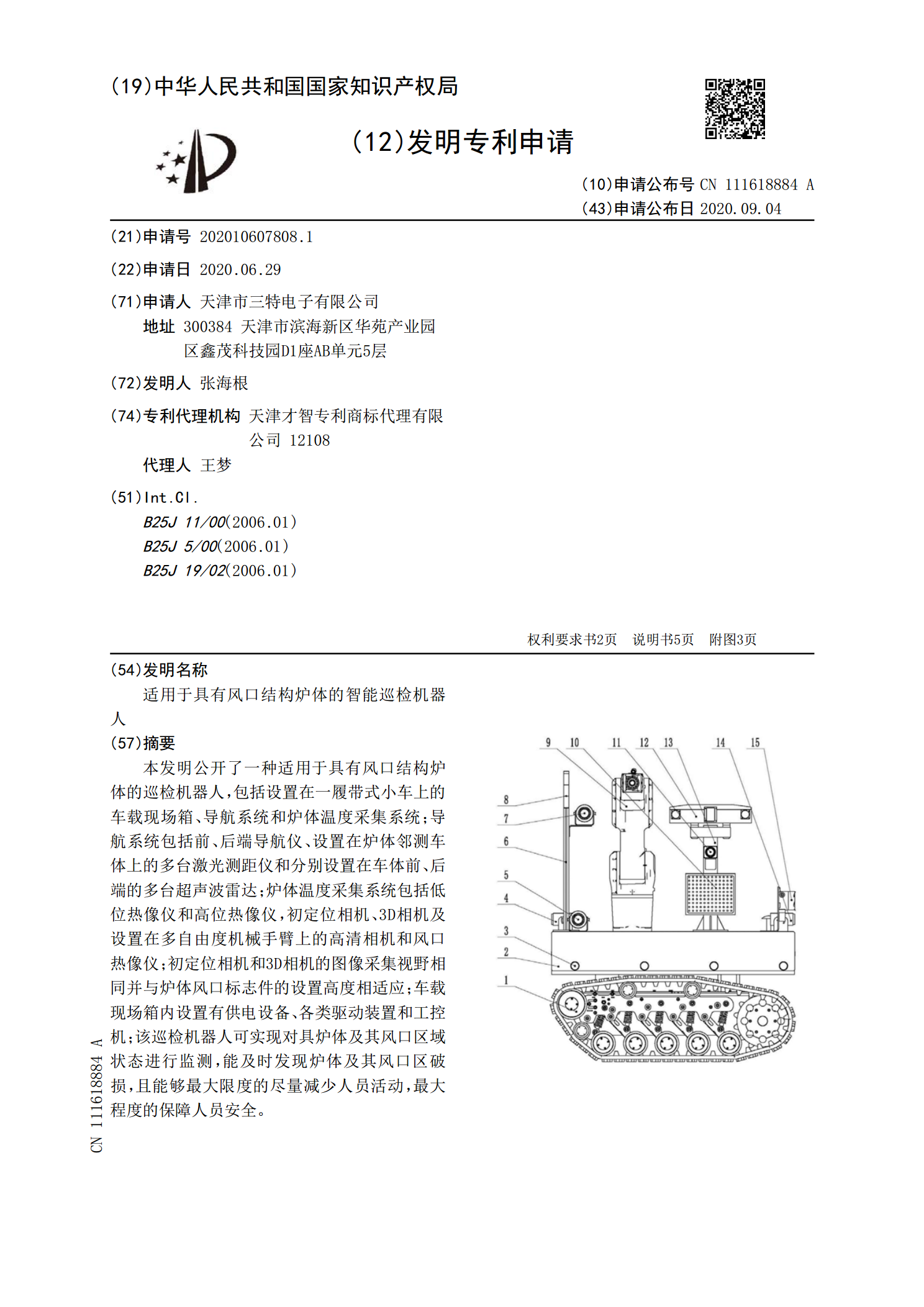
适用于具有风口结构炉体的智能巡检机器人.pdf
本发明公开了一种适用于具有风口结构炉体的巡检机器人,包括设置在一履带式小车上的车载现场箱、导航系统和炉体温度采集系统;导航系统包括前、后端导航仪、设置在炉体邻测车体上的多台激光测距仪和分别设置在车体前、后端的多台超声波雷达;炉体温度采集系统包括低位热像仪和高位热像仪,初定位相机、3D相机及设置在多自由度机械手臂上的高清相机和风口热像仪;初定位相机和3D相机的图像采集视野相同并与炉体风口标志件的设置高度相适应;车载现场箱内设置有供电设备、各类驱动装置和工控机;该巡检机器人可实现对具炉体及其风口区域状态进行监
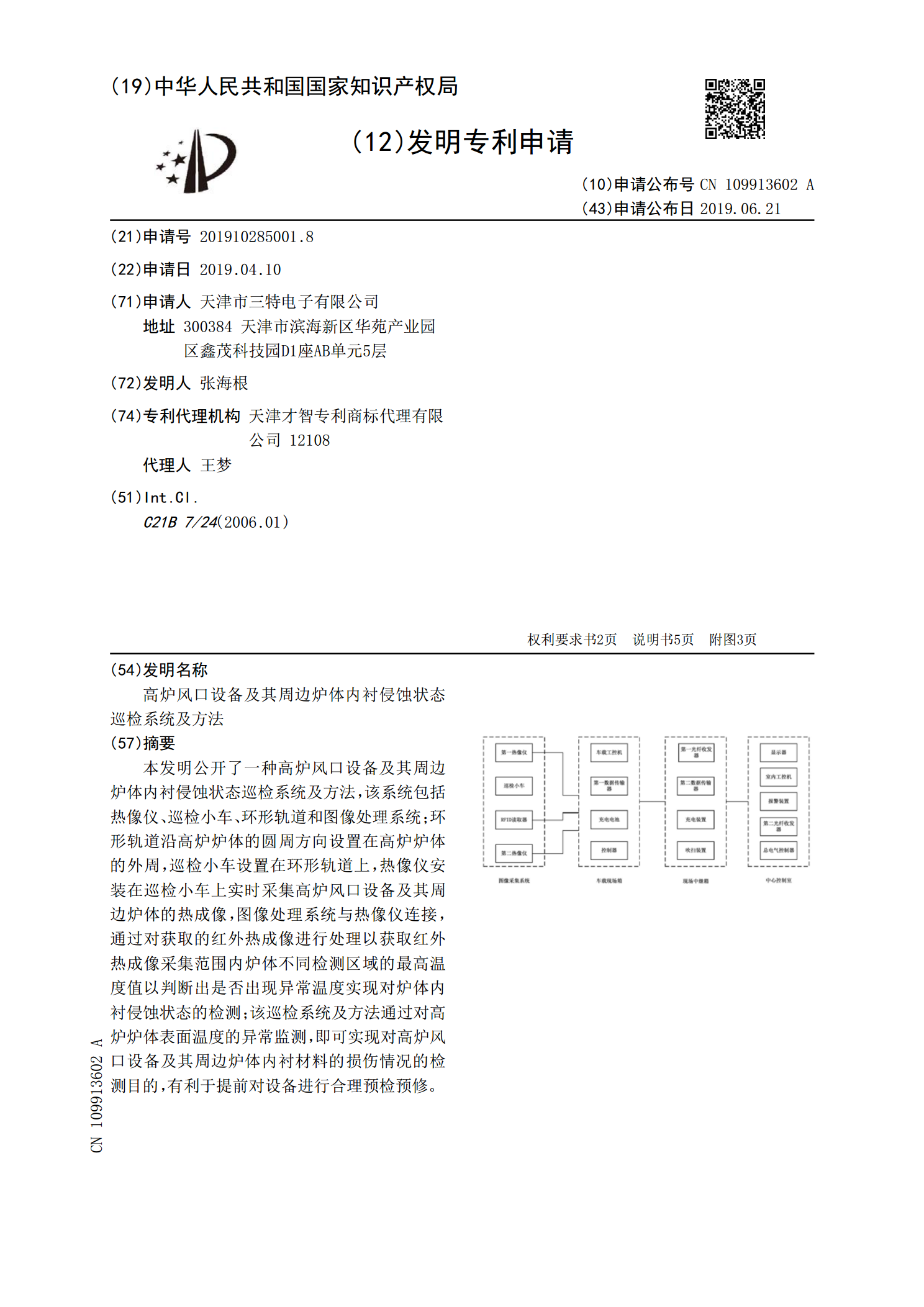
高炉风口设备及其周边炉体内衬侵蚀状态巡检系统及方法.pdf
本发明公开了一种高炉风口设备及其周边炉体内衬侵蚀状态巡检系统及方法,该系统包括热像仪、巡检小车、环形轨道和图像处理系统;环形轨道沿高炉炉体的圆周方向设置在高炉炉体的外周,巡检小车设置在环形轨道上,热像仪安装在巡检小车上实时采集高炉风口设备及其周边炉体的热成像,图像处理系统与热像仪连接,通过对获取的红外热成像进行处理以获取红外热成像采集范围内炉体不同检测区域的最高温度值以判断出是否出现异常温度实现对炉体内衬侵蚀状态的检测;该巡检系统及方法通过对高炉炉体表面温度的异常监测,即可实现对高炉风口设备及其周边炉体内
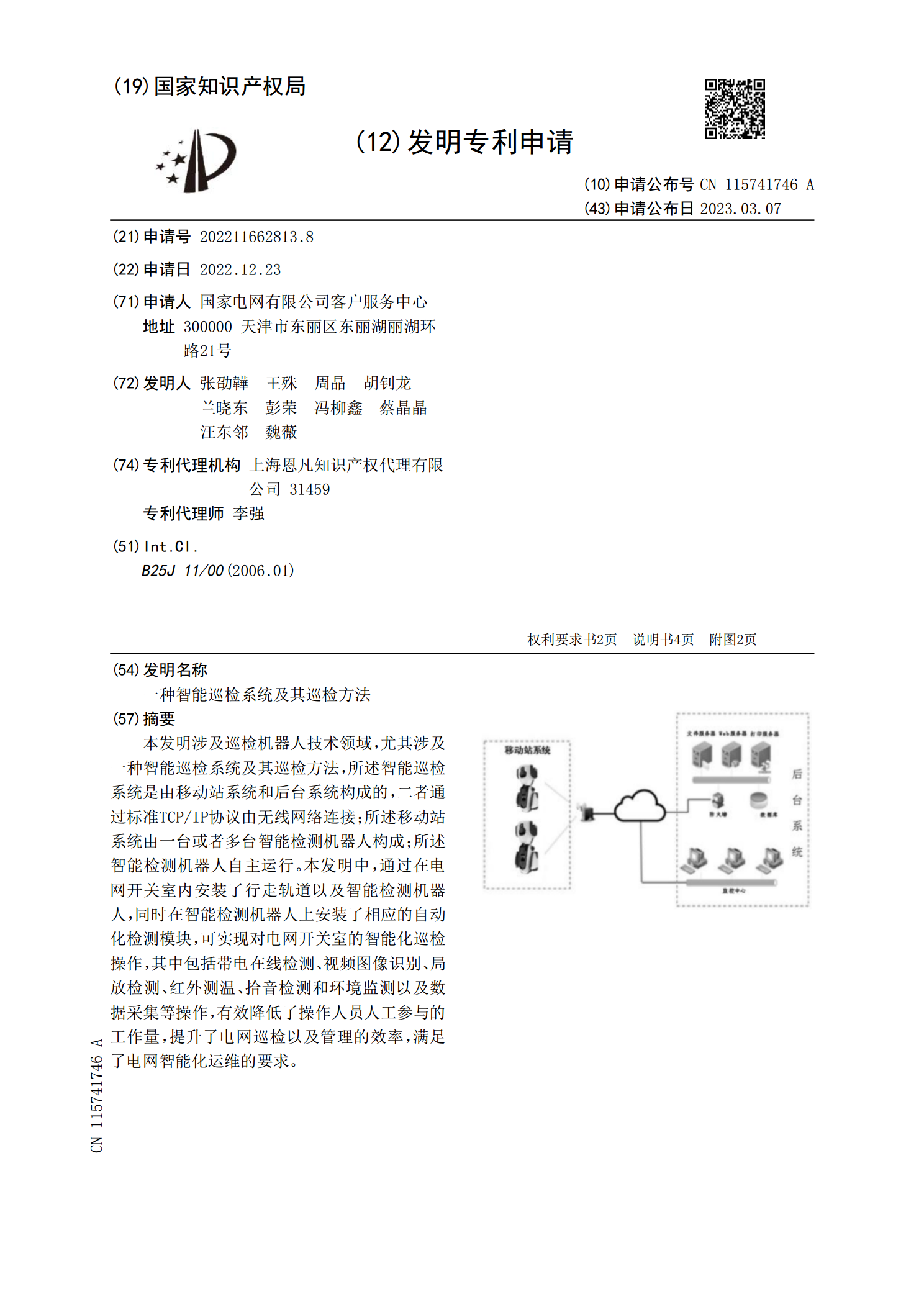
一种智能巡检系统及其巡检方法.pdf
本发明涉及巡检机器人技术领域,尤其涉及一种智能巡检系统及其巡检方法,所述智能巡检系统是由移动站系统和后台系统构成的,二者通过标准TCP/IP协议由无线网络连接;所述移动站系统由一台或者多台智能检测机器人构成;所述智能检测机器人自主运行。本发明中,通过在电网开关室内安装了行走轨道以及智能检测机器人,同时在智能检测机器人上安装了相应的自动化检测模块,可实现对电网开关室的智能化巡检操作,其中包括带电在线检测、视频图像识别、局放检测、红外测温、拾音检测和环境监测以及数据采集等操作,有效降低了操作人员人工参与的工作
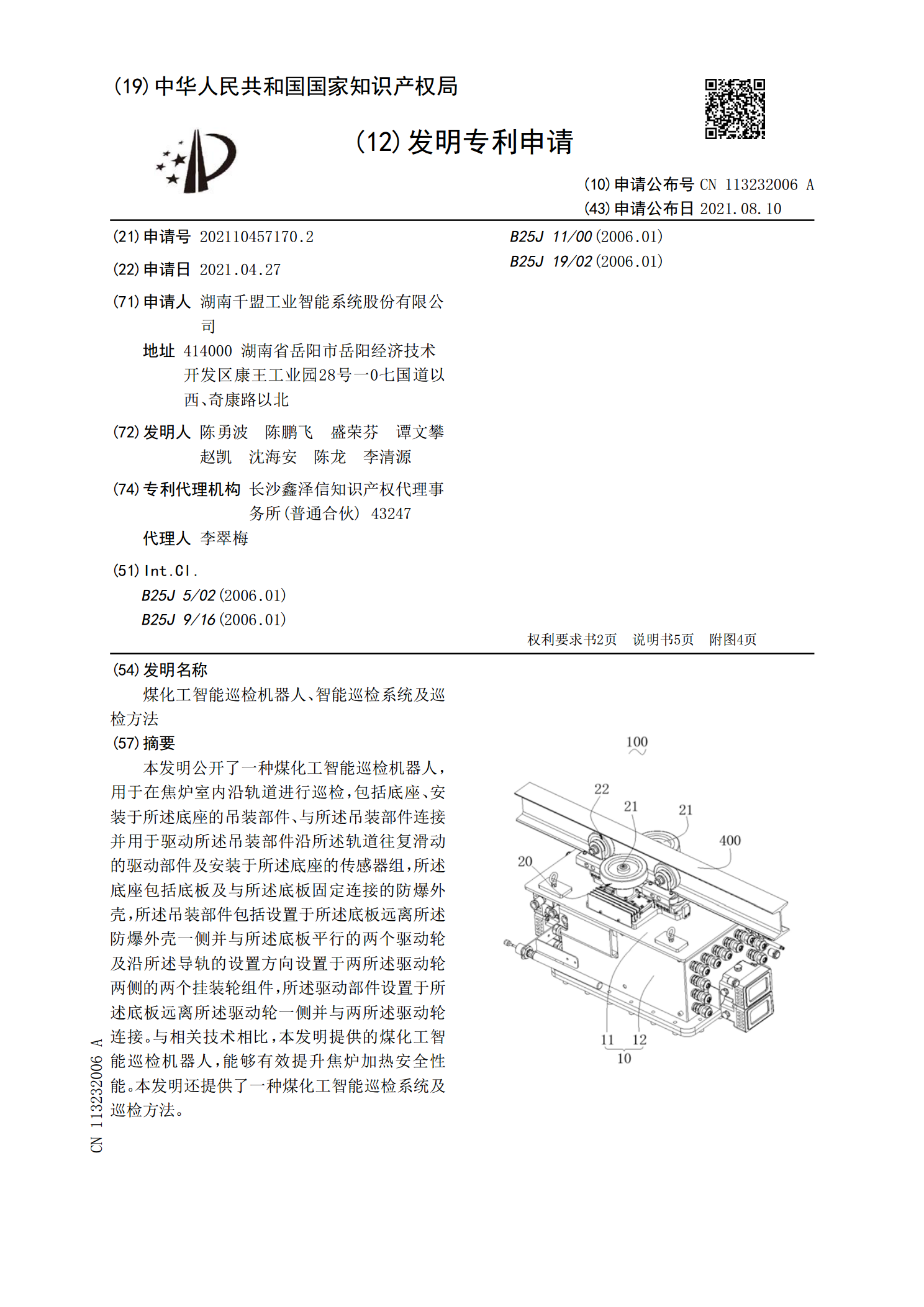
煤化工智能巡检机器人、智能巡检系统及巡检方法.pdf
本发明公开了一种煤化工智能巡检机器人,用于在焦炉室内沿轨道进行巡检,包括底座、安装于所述底座的吊装部件、与所述吊装部件连接并用于驱动所述吊装部件沿所述轨道往复滑动的驱动部件及安装于所述底座的传感器组,所述底座包括底板及与所述底板固定连接的防爆外壳,所述吊装部件包括设置于所述底板远离所述防爆外壳一侧并与所述底板平行的两个驱动轮及沿所述导轨的设置方向设置于两所述驱动轮两侧的两个挂装轮组件,所述驱动部件设置于所述底板远离所述驱动轮一侧并与两所述驱动轮连接。与相关技术相比,本发明提供的煤化工智能巡检机器人,能够有