
一种基于视觉的机器人智能引导系统及方法.pdf

爱欢****23


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉的机器人智能引导系统及方法.pdf
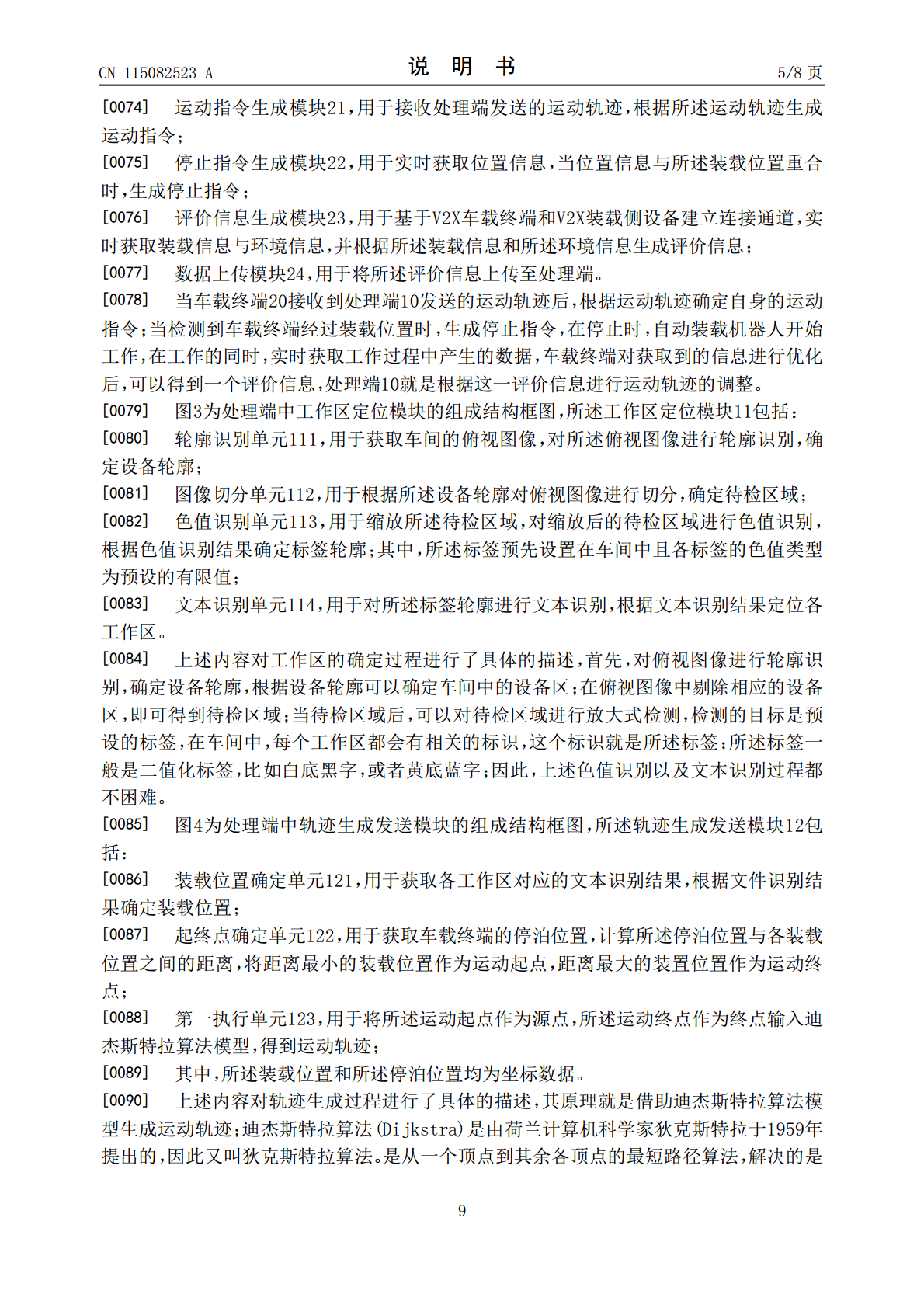
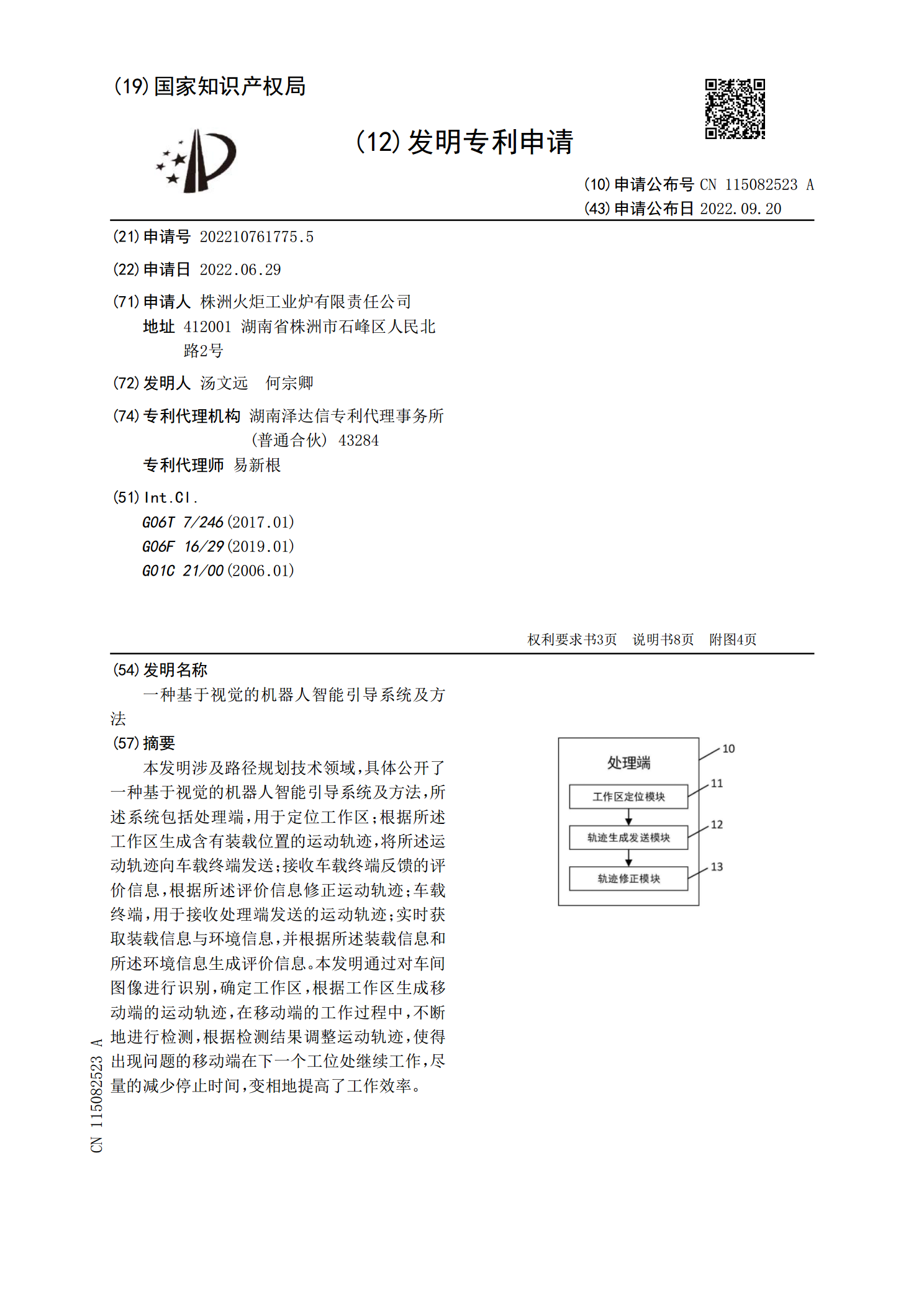
本发明涉及路径规划技术领域,具体公开了一种基于视觉的机器人智能引导系统及方法,所述系统包括处理端,用于定位工作区;根据所述工作区生成含有装载位置的运动轨迹,将所述运动轨迹向车载终端发送;接收车载终端反馈的评价信息,根据所述评价信息修正运动轨迹;车载终端,用于接收处理端发送的运动轨迹;实时获取装载信息与环境信息,并根据所述装载信息和所述环境信息生成评价信息。本发明通过对车间图像进行识别,确定工作区,根据工作区生成移动端的运动轨迹,在移动端的工作过程中,不断地进行检测,根据检测结果调整运动轨迹,使得出现问题的

基于机器人与视觉引导的星载设备智能装配方法.docx
基于机器人与视觉引导的星载设备智能装配方法基于机器人与视觉引导的星载设备智能装配方法摘要:随着航天技术的不断发展,星载设备在卫星平台上的应用越来越广泛。然而,星载设备的装配是一个非常复杂且精密的过程,传统的手工装配方法往往效率低下且容易出错。为了提高星载设备的装配效率和质量,本文提出了一种基于机器人与视觉引导的智能装配方法。该方法利用机器人进行自动化装配操作,并借助视觉引导实现装配过程中的位置精准控制,极大地提高了装配的准确性和效率。关键词:星载设备;智能装配;机器人;视觉引导1.引言随着卫星技术的迅速发

一种基于智能眼镜的视觉障碍行人过街引导系统.pdf
本发明涉及一种基于智能眼镜的视觉障碍行人过街引导系统,该引导系统包括道路系统与基于智能眼镜的行为指示系统两个部分;所述道路系统由信号灯信息发射设备、车辆信息发射设备与车辆信息接收设备构成;所述信号灯信息发射设备安装在行人过街的信号灯上,与信号机连接,用于向视觉障碍行人发送信号灯信息;所述车辆信息发射设备安装在机动车上,与车载GPS跟踪设备连接,用于向视觉障碍行人发送车辆位置信息;所述车辆信息接收设备安装在机动车上,与车载语音提示系统连接,用于接收来自视觉障碍行人发送的位置信息;所述基于智能眼镜的行为指示系
一种基于激光视觉引导的机器人定位抓取方法及系统.pdf
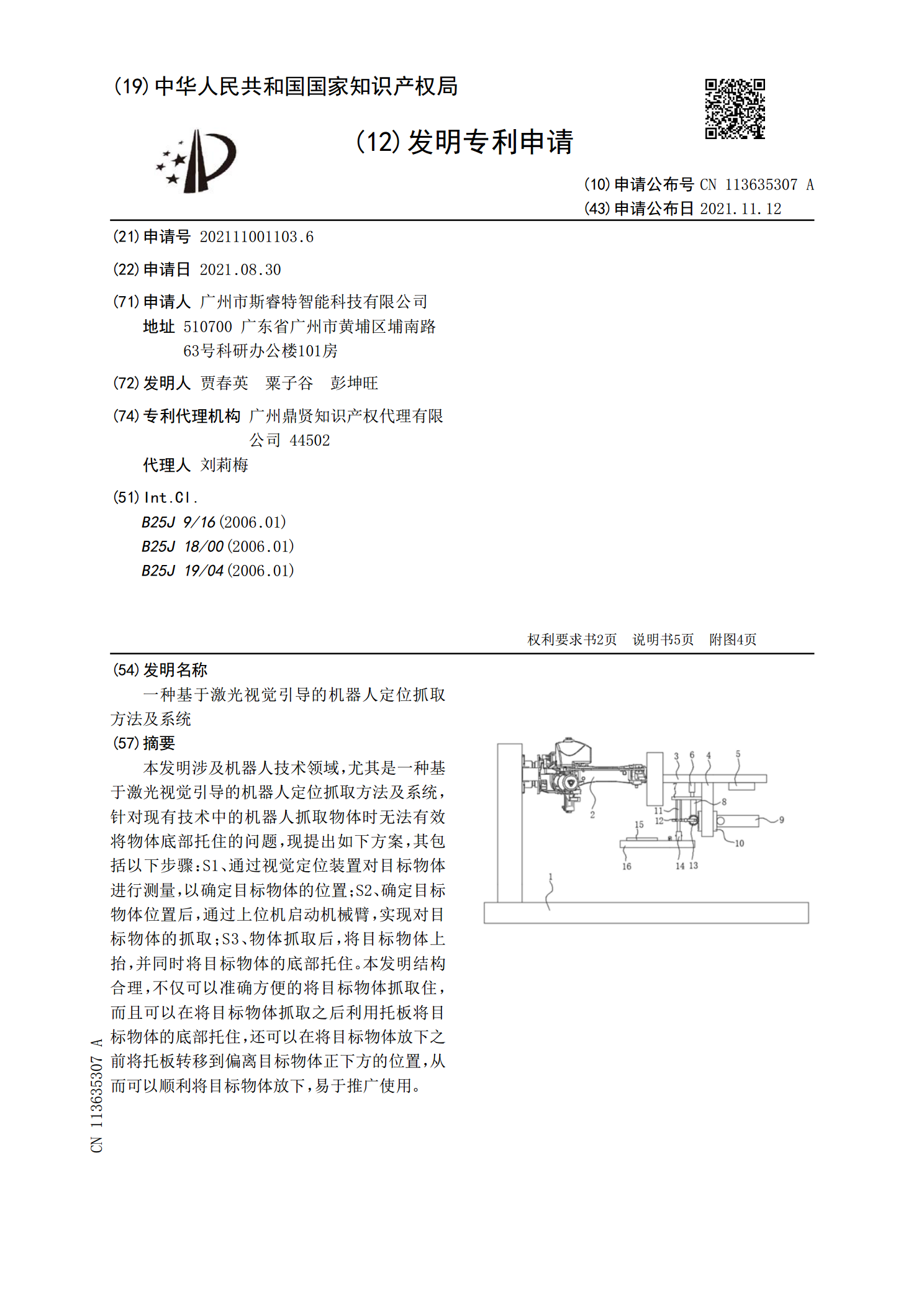
本发明涉及机器人技术领域,尤其是一种基于激光视觉引导的机器人定位抓取方法及系统,针对现有技术中的机器人抓取物体时无法有效将物体底部托住的问题,现提出如下方案,其包括以下步骤:S1、通过视觉定位装置对目标物体进行测量,以确定目标物体的位置;S2、确定目标物体位置后,通过上位机启动机械臂,实现对目标物体的抓取;S3、物体抓取后,将目标物体上抬,并同时将目标物体的底部托住。本发明结构合理,不仅可以准确方便的将目标物体抓取住,而且可以在将目标物体抓取之后利用托板将目标物体的底部托住,还可以在将目标物体放下之前将托

一种基于视觉的机器人智能理鞋系统设计与实现方法.pdf
本发明公开了一种基于视觉的机器人智能理鞋系统设计与实现方法,包括步骤:获取目标图像;所述目标图像中的目标包括鞋子和鞋架;根据所述目标图像,确定各所述鞋子的位姿、所述鞋架的位姿以及各所述鞋子的图像;根据所有所述鞋子的图像,确定配对的鞋子;根据所述配对的鞋子中各鞋子的位姿和所述鞋架的位姿,将所述配对的鞋子放入所述鞋架。本申请通过确定目标图像中配对的鞋子,并根据目标图像确定鞋子的位姿和鞋架的位姿,将配对的鞋子放入鞋架,解决了鞋子乱摆放的问题。