
基于机器人与视觉引导的星载设备智能装配方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于机器人与视觉引导的星载设备智能装配方法.docx
基于机器人与视觉引导的星载设备智能装配方法基于机器人与视觉引导的星载设备智能装配方法摘要:随着航天技术的不断发展,星载设备在卫星平台上的应用越来越广泛。然而,星载设备的装配是一个非常复杂且精密的过程,传统的手工装配方法往往效率低下且容易出错。为了提高星载设备的装配效率和质量,本文提出了一种基于机器人与视觉引导的智能装配方法。该方法利用机器人进行自动化装配操作,并借助视觉引导实现装配过程中的位置精准控制,极大地提高了装配的准确性和效率。关键词:星载设备;智能装配;机器人;视觉引导1.引言随着卫星技术的迅速发
一种基于视觉的机器人智能引导系统及方法.pdf
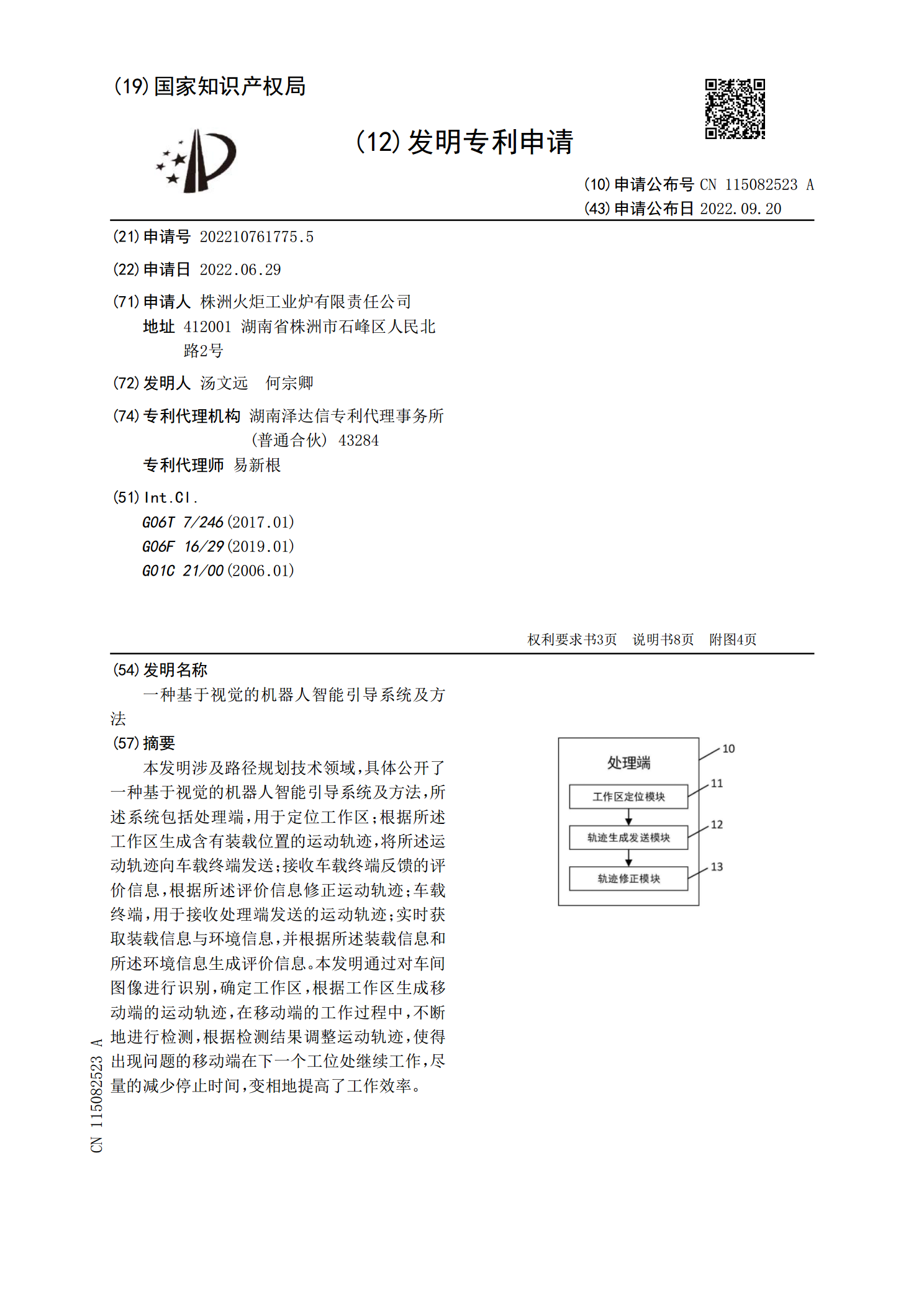
本发明涉及路径规划技术领域,具体公开了一种基于视觉的机器人智能引导系统及方法,所述系统包括处理端,用于定位工作区;根据所述工作区生成含有装载位置的运动轨迹,将所述运动轨迹向车载终端发送;接收车载终端反馈的评价信息,根据所述评价信息修正运动轨迹;车载终端,用于接收处理端发送的运动轨迹;实时获取装载信息与环境信息,并根据所述装载信息和所述环境信息生成评价信息。本发明通过对车间图像进行识别,确定工作区,根据工作区生成移动端的运动轨迹,在移动端的工作过程中,不断地进行检测,根据检测结果调整运动轨迹,使得出现问题的

基于视觉引导的工业机器人自动销孔装配的方法.pdf
本发明提供了一种基于视觉引导的工业机器人自动销孔装配的方法,本发明利用CCD工业相机作为视觉系统,采用定位销轮廓识别算法、定位算法,完成包括定位销的识别、定位、抓取以及插孔等作业任务。本发明可精确估计定位销在空间中的位姿,精度高。本发明中图像匹配和识别均基于轮廓,容易实现,实时性好。本发明实现了基于单目手眼机械臂从零件抓取到插销作业的完全自动化,同时保持了硬件成本,提高了机器人的工作效率和质量。
基于深度相机的叶片装配视觉引导方法及系统.pdf
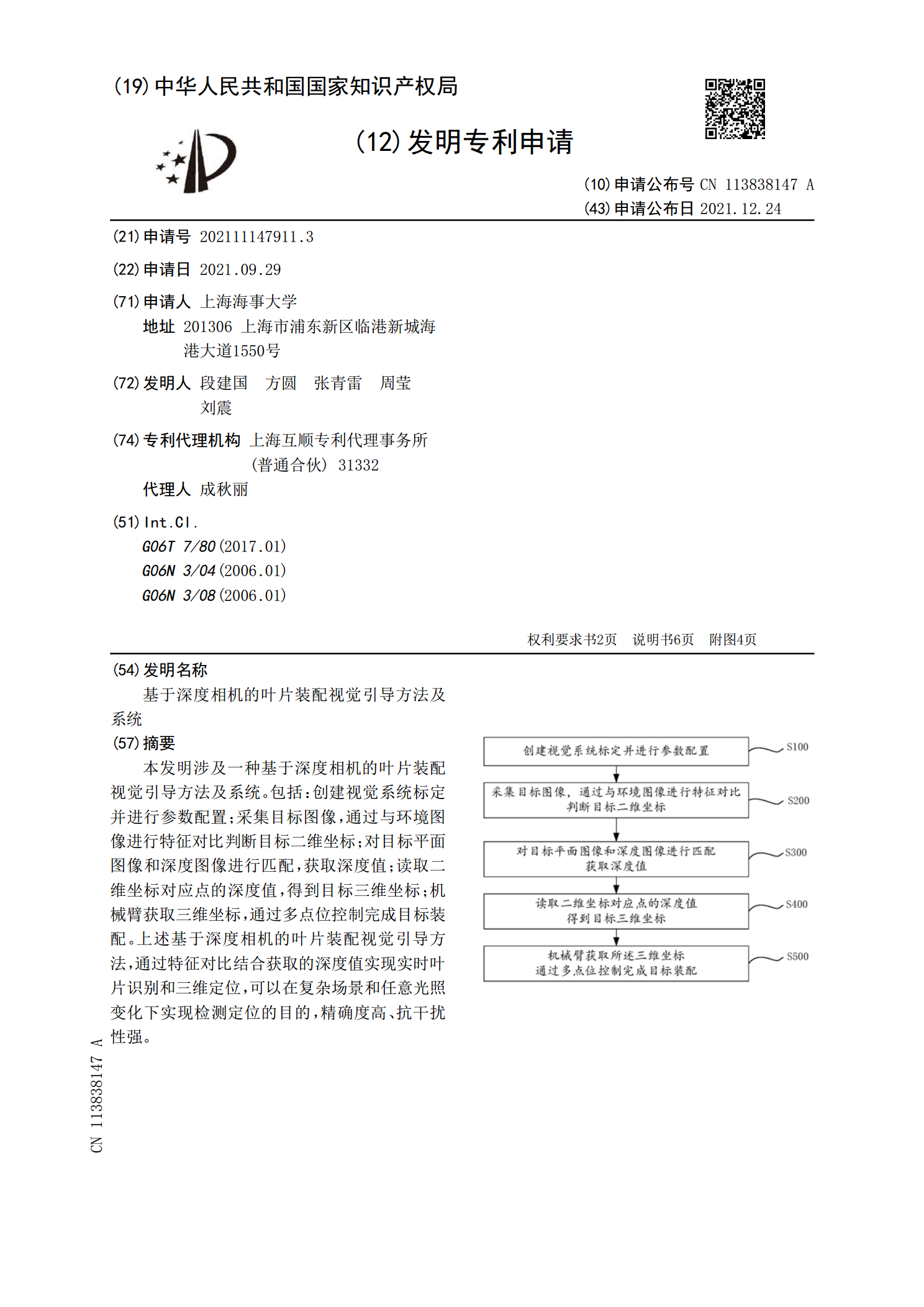
本发明涉及一种基于深度相机的叶片装配视觉引导方法及系统。包括:创建视觉系统标定并进行参数配置;采集目标图像,通过与环境图像进行特征对比判断目标二维坐标;对目标平面图像和深度图像进行匹配,获取深度值;读取二维坐标对应点的深度值,得到目标三维坐标;机械臂获取三维坐标,通过多点位控制完成目标装配。上述基于深度相机的叶片装配视觉引导方法,通过特征对比结合获取的深度值实现实时叶片识别和三维定位,可以在复杂场景和任意光照变化下实现检测定位的目的,精确度高、抗干扰性强。

机器人视觉引导方法、装置及设备.pdf
本发明适用于机器人技术领域,提供了一种机器人视觉引导方法、装置及设备。该方法包括:在机械手臂运动到指定位置后发送图像获取指令至图像获取单元获取目标物体的图像;根据预存的物体特征和地标特征,分析得到所述图像中的目标物体和目的地;从所述图像中获取目标物体的轮廓特征点和目的地的轮廓特征点;根据获取的轮廓特征点确定目标物体的坐标和目的地的坐标;根据目标物体的坐标和目的地的坐标,确定当前作业位置;根据机械臂上手爪的当前位置和当前作业位置,确定移动路径;根据移动路径生成动作指令控制机械臂和所述手爪执行移动所述目标物体