
一种基于激光视觉引导的机器人定位抓取方法及系统.pdf

森林****来了

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光视觉引导的机器人定位抓取方法及系统.pdf
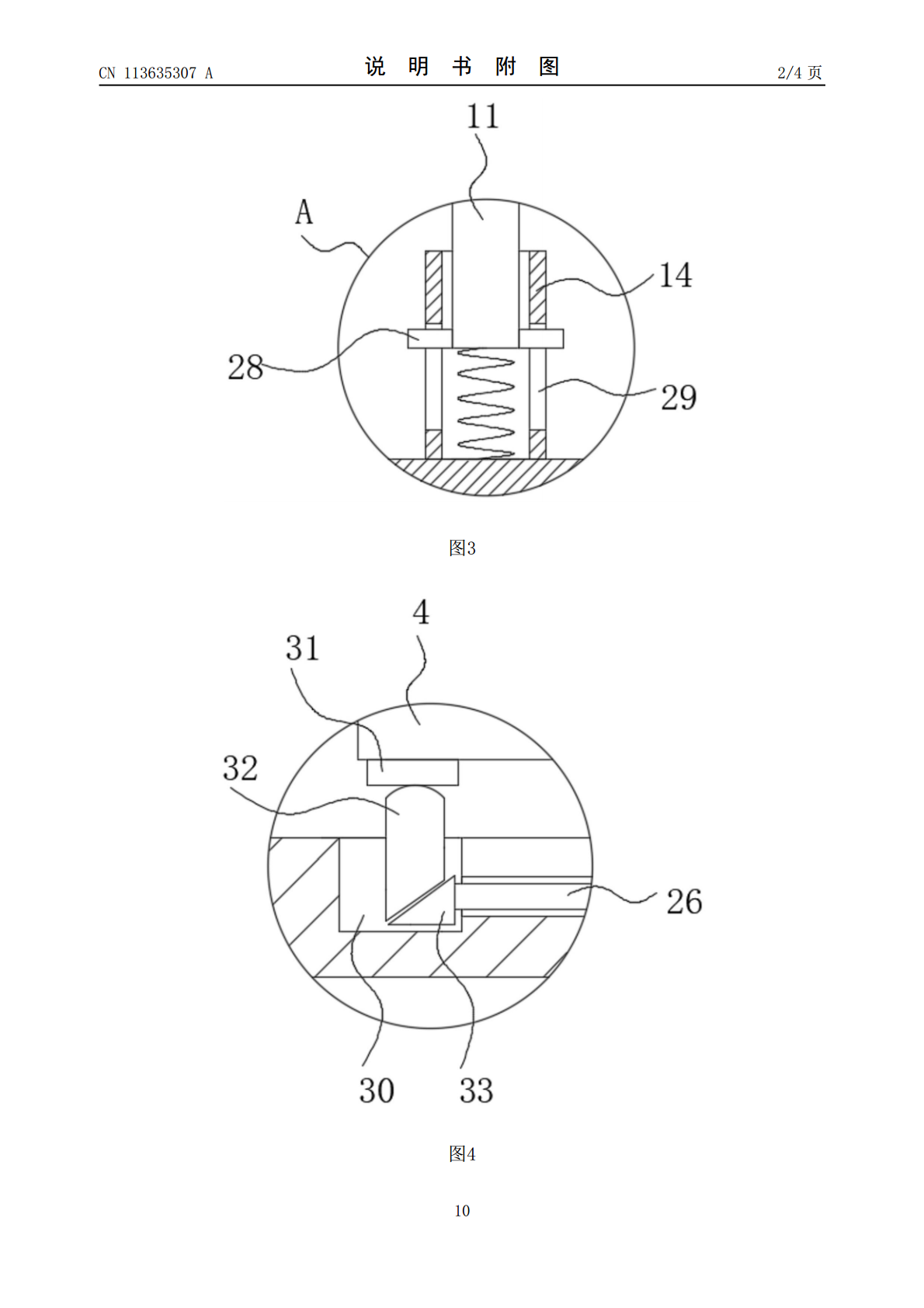
本发明涉及机器人技术领域,尤其是一种基于激光视觉引导的机器人定位抓取方法及系统,针对现有技术中的机器人抓取物体时无法有效将物体底部托住的问题,现提出如下方案,其包括以下步骤:S1、通过视觉定位装置对目标物体进行测量,以确定目标物体的位置;S2、确定目标物体位置后,通过上位机启动机械臂,实现对目标物体的抓取;S3、物体抓取后,将目标物体上抬,并同时将目标物体的底部托住。本发明结构合理,不仅可以准确方便的将目标物体抓取住,而且可以在将目标物体抓取之后利用托板将目标物体的底部托住,还可以在将目标物体放下之前将托
一种基于主动视觉定位的服务机器人抓取系统.pdf
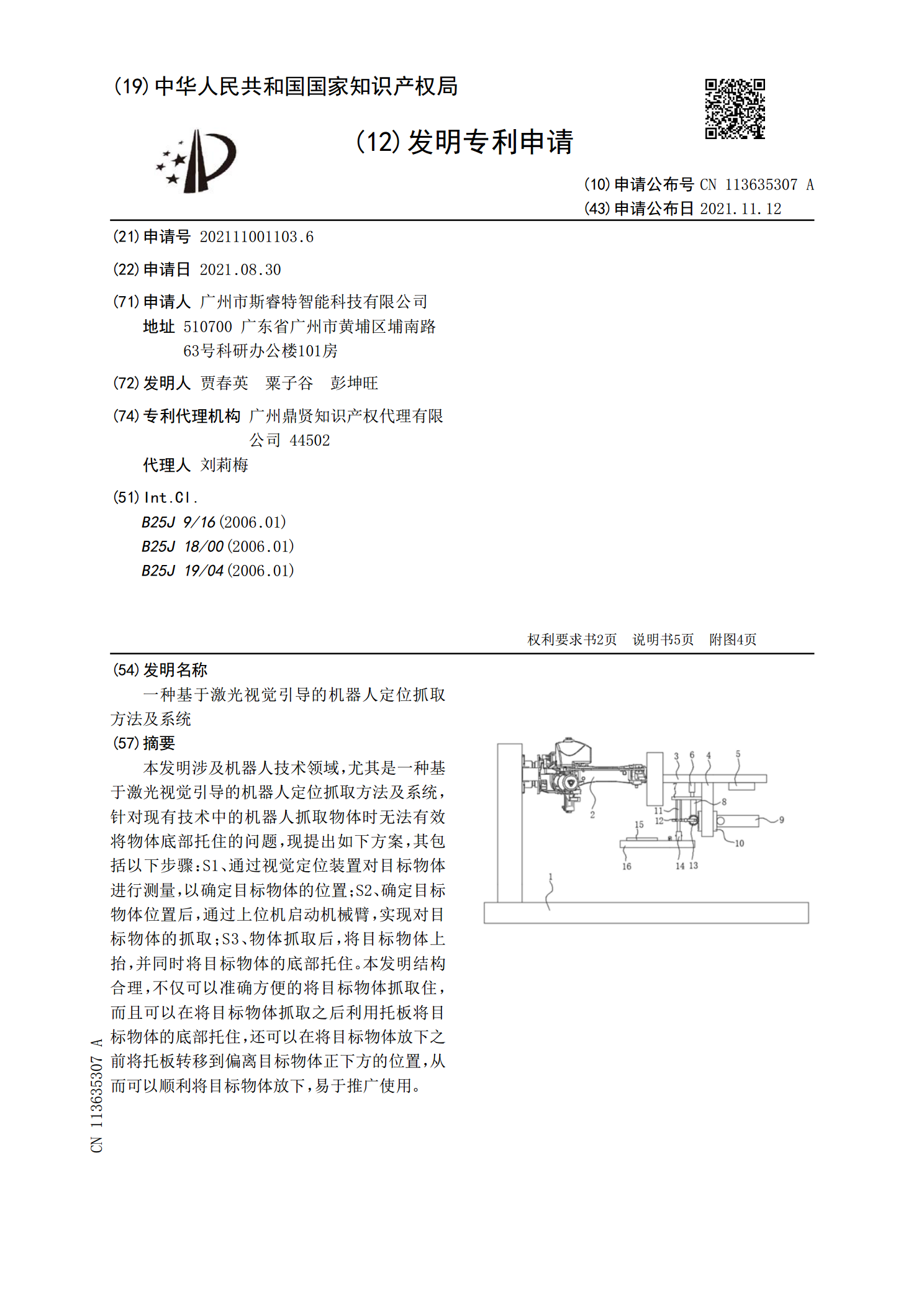
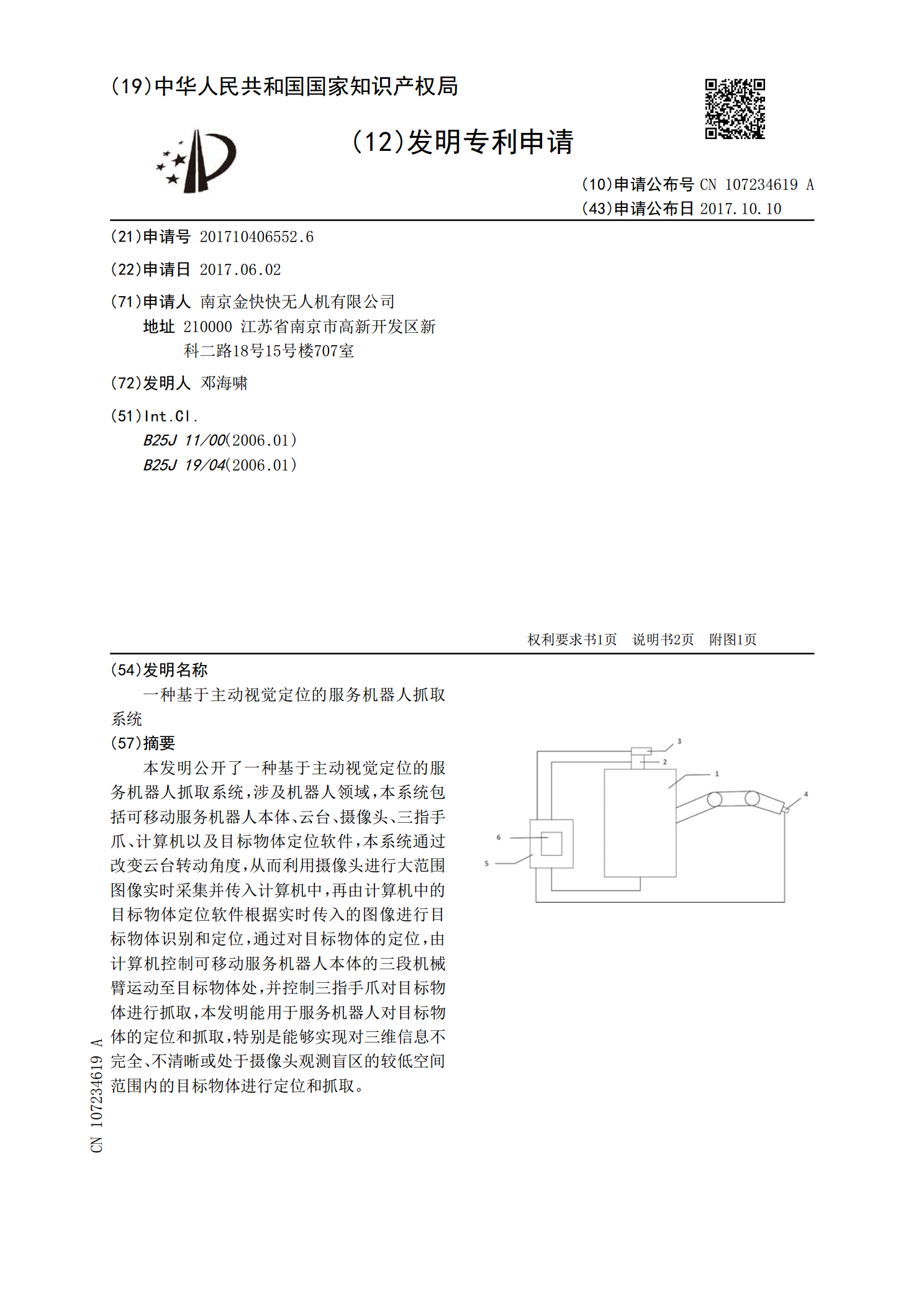
本发明公开了一种基于主动视觉定位的服务机器人抓取系统,涉及机器人领域,本系统包括可移动服务机器人本体、云台、摄像头、三指手爪、计算机以及目标物体定位软件,本系统通过改变云台转动角度,从而利用摄像头进行大范围图像实时采集并传入计算机中,再由计算机中的目标物体定位软件根据实时传入的图像进行目标物体识别和定位,通过对目标物体的定位,由计算机控制可移动服务机器人本体的三段机械臂运动至目标物体处,并控制三指手爪对目标物体进行抓取,本发明能用于服务机器人对目标物体的定位和抓取,特别是能够实现对三维信息不完全、不清晰或
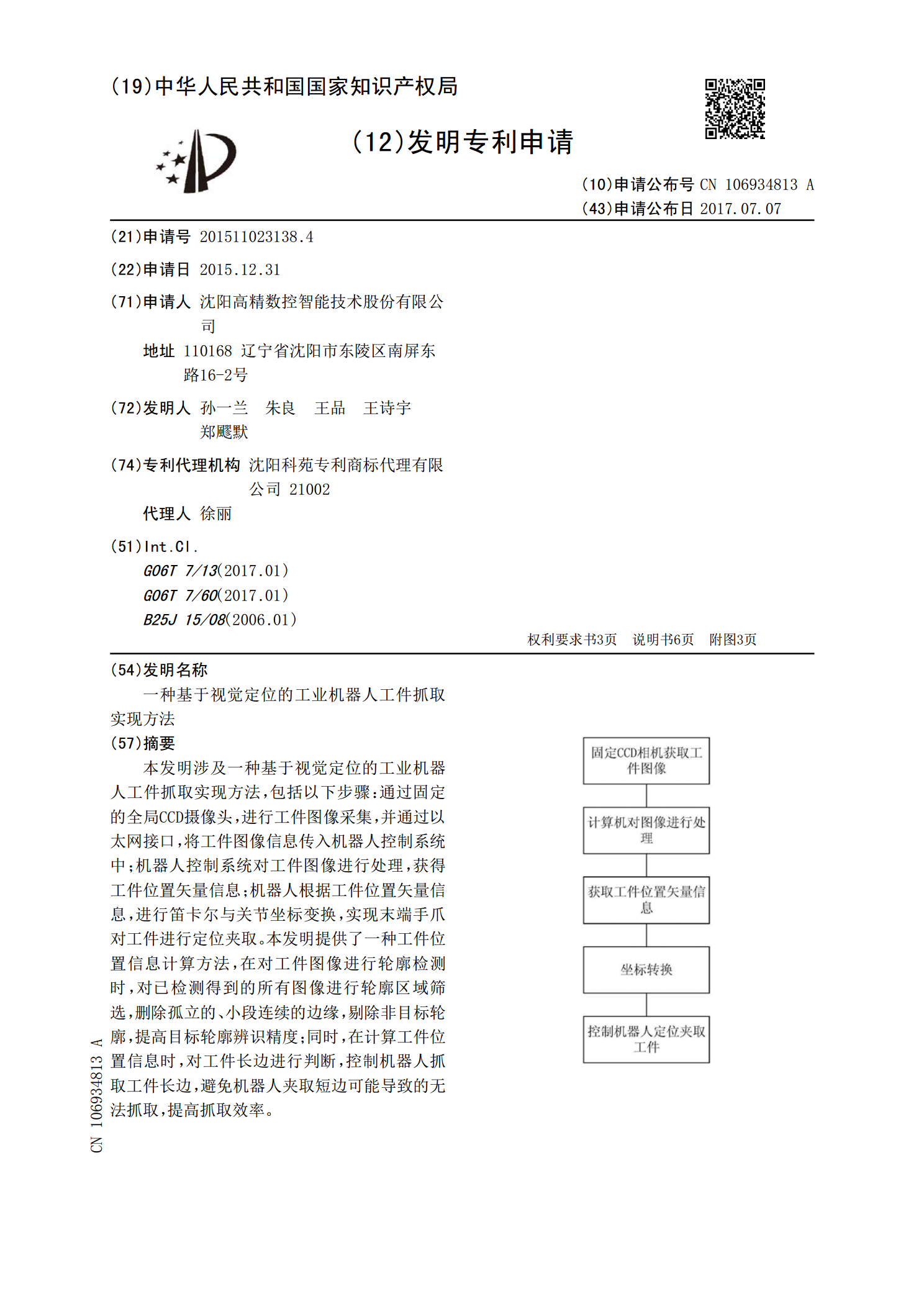
一种基于视觉定位的工业机器人工件抓取实现方法.pdf
本发明涉及一种基于视觉定位的工业机器人工件抓取实现方法,包括以下步骤:通过固定的全局CCD摄像头,进行工件图像采集,并通过以太网接口,将工件图像信息传入机器人控制系统中;机器人控制系统对工件图像进行处理,获得工件位置矢量信息;机器人根据工件位置矢量信息,进行笛卡尔与关节坐标变换,实现末端手爪对工件进行定位夹取。本发明提供了一种工件位置信息计算方法,在对工件图像进行轮廓检测时,对已检测得到的所有图像进行轮廓区域筛选,删除孤立的、小段连续的边缘,剔除非目标轮廓,提高目标轮廓辨识精度;同时,在计算工件位置信息时

双目视觉引导机器人定位抓取技术的研究.docx
双目视觉引导机器人定位抓取技术的研究双目视觉引导机器人定位抓取技术的研究摘要:随着工业自动化程度的不断提高,机器人已经成为现代工厂生产线上的重要组成部分。其中,机器人的视觉引导技术是关键的研究领域之一。本文重点探讨双目视觉引导机器人定位抓取技术的研究。首先,介绍了双目视觉的原理、优势和应用场景;其次,分析了机器视觉技术在机器人中的应用;接着,详细阐述了双目视觉引导机器人定位抓取技术的研究内容和方法;最后,简要总结了本文的研究成果和进一步的研究方向。关键词:双目视觉;机器人;定位抓取技术;机器视觉一、引言机
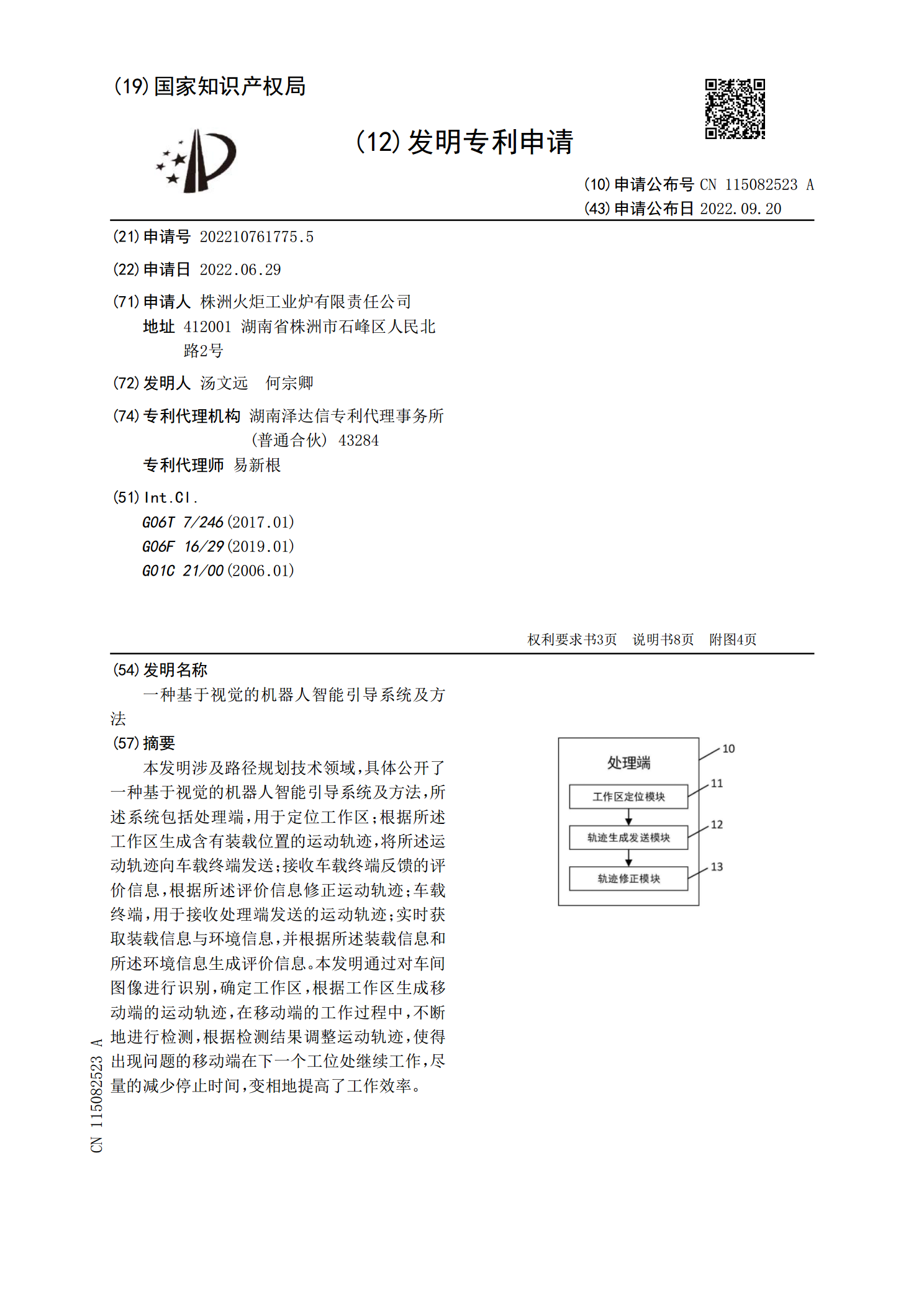
一种基于视觉的机器人智能引导系统及方法.pdf
本发明涉及路径规划技术领域,具体公开了一种基于视觉的机器人智能引导系统及方法,所述系统包括处理端,用于定位工作区;根据所述工作区生成含有装载位置的运动轨迹,将所述运动轨迹向车载终端发送;接收车载终端反馈的评价信息,根据所述评价信息修正运动轨迹;车载终端,用于接收处理端发送的运动轨迹;实时获取装载信息与环境信息,并根据所述装载信息和所述环境信息生成评价信息。本发明通过对车间图像进行识别,确定工作区,根据工作区生成移动端的运动轨迹,在移动端的工作过程中,不断地进行检测,根据检测结果调整运动轨迹,使得出现问题的