
一种基于视觉的机器人智能理鞋系统设计与实现方法.pdf

文库****坚白


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于视觉的机器人智能理鞋系统设计与实现方法.pdf
本发明公开了一种基于视觉的机器人智能理鞋系统设计与实现方法,包括步骤:获取目标图像;所述目标图像中的目标包括鞋子和鞋架;根据所述目标图像,确定各所述鞋子的位姿、所述鞋架的位姿以及各所述鞋子的图像;根据所有所述鞋子的图像,确定配对的鞋子;根据所述配对的鞋子中各鞋子的位姿和所述鞋架的位姿,将所述配对的鞋子放入所述鞋架。本申请通过确定目标图像中配对的鞋子,并根据目标图像确定鞋子的位姿和鞋架的位姿,将配对的鞋子放入鞋架,解决了鞋子乱摆放的问题。

基于视觉的并联机器人智能分拣系统设计与实现.docx
基于视觉的并联机器人智能分拣系统设计与实现基于视觉的并联机器人智能分拣系统设计与实现摘要:随着现代制造业的发展和智能化的进步,机器人系统在工业制造领域起着越来越重要的作用。并联机器人作为一种常见的工业机器人类型,具有较大的起重能力和高精度的定位控制能力。本文基于视觉系统,设计了一个智能分拣系统,以提高生产效率和减少人工操作。关键词:并联机器人;视觉系统;智能分拣;生产效率1.引言随着工业制造业的迅速发展,对于高效率和高精度的产品分拣需求越来越大。传统的人工分拣方式不仅效率低下,而且存在一定的风险因素。因此

基于视觉的机器人智能抓取系统设计与实现的开题报告.docx
基于视觉的机器人智能抓取系统设计与实现的开题报告一、选题背景及意义视觉机器人指的是能基于视觉信息,实现某些特定功能的智能机器人,广泛应用于许多领域。智能抓取系统是其中一个非常重要的应用,能够实现对物体的自动抓取、分拣等操作。智能抓取系统需要利用机器视觉技术进行物体识别、定位和姿态估计等操作,进而控制机械臂进行相应的动作。因此,设计一套基于视觉的机器人智能抓取系统具有非常重要的意义。二、研究内容1.基于视觉的物体识别通过视觉识别技术,对场景中的物体进行自动识别和分类,获取物体的姿态、大小和位置等信息,从而为

基于视觉的机器人智能抓取系统设计与实现的任务书.docx
基于视觉的机器人智能抓取系统设计与实现的任务书任务书:基于视觉的机器人智能抓取系统设计与实现引言:机器人技术正在逐渐普及和发展,成为推动社会和产业发展的重要力量,而机器人抓取技术作为机器人领域上的一个重要研究方向,其在工业制造、服务机器人、农业等领域的应用潜力巨大。视觉技术又是机器人视觉感知的重要手段,可以提供给机器人大量的感知信息。本任务书旨在设计并实现一个基于视觉的机器人智能抓取系统,并通过测试验证该系统的可行性和性能。系统设计要求:1.本系统应至少包括一台机器人和一个视觉传感器,视觉传感器可以是普通
一种基于视觉的机器人智能引导系统及方法.pdf
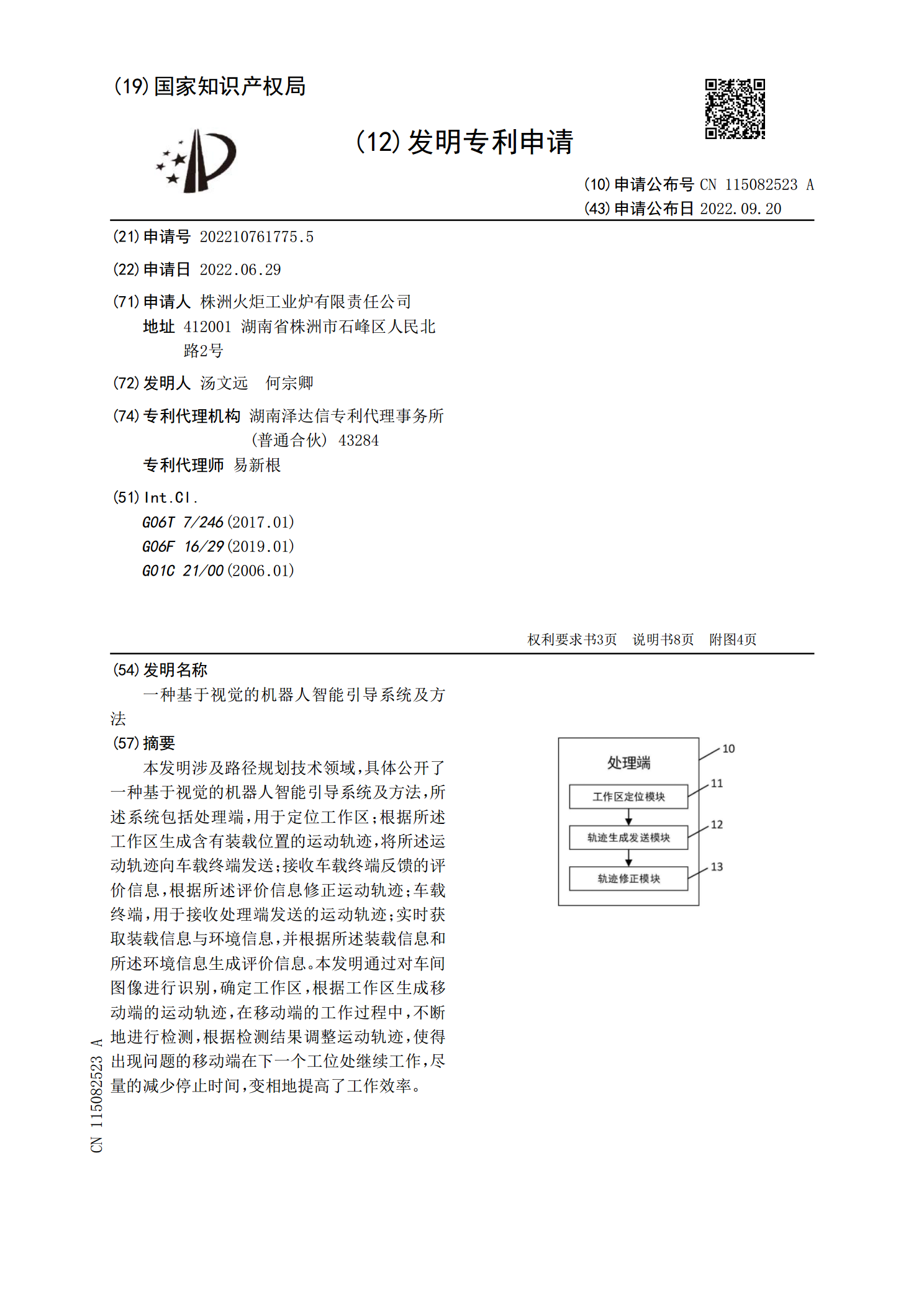
本发明涉及路径规划技术领域,具体公开了一种基于视觉的机器人智能引导系统及方法,所述系统包括处理端,用于定位工作区;根据所述工作区生成含有装载位置的运动轨迹,将所述运动轨迹向车载终端发送;接收车载终端反馈的评价信息,根据所述评价信息修正运动轨迹;车载终端,用于接收处理端发送的运动轨迹;实时获取装载信息与环境信息,并根据所述装载信息和所述环境信息生成评价信息。本发明通过对车间图像进行识别,确定工作区,根据工作区生成移动端的运动轨迹,在移动端的工作过程中,不断地进行检测,根据检测结果调整运动轨迹,使得出现问题的