
一种电机传动PWM死区的补偿方法.pdf

努力****采萍

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电机传动PWM死区的补偿方法.pdf
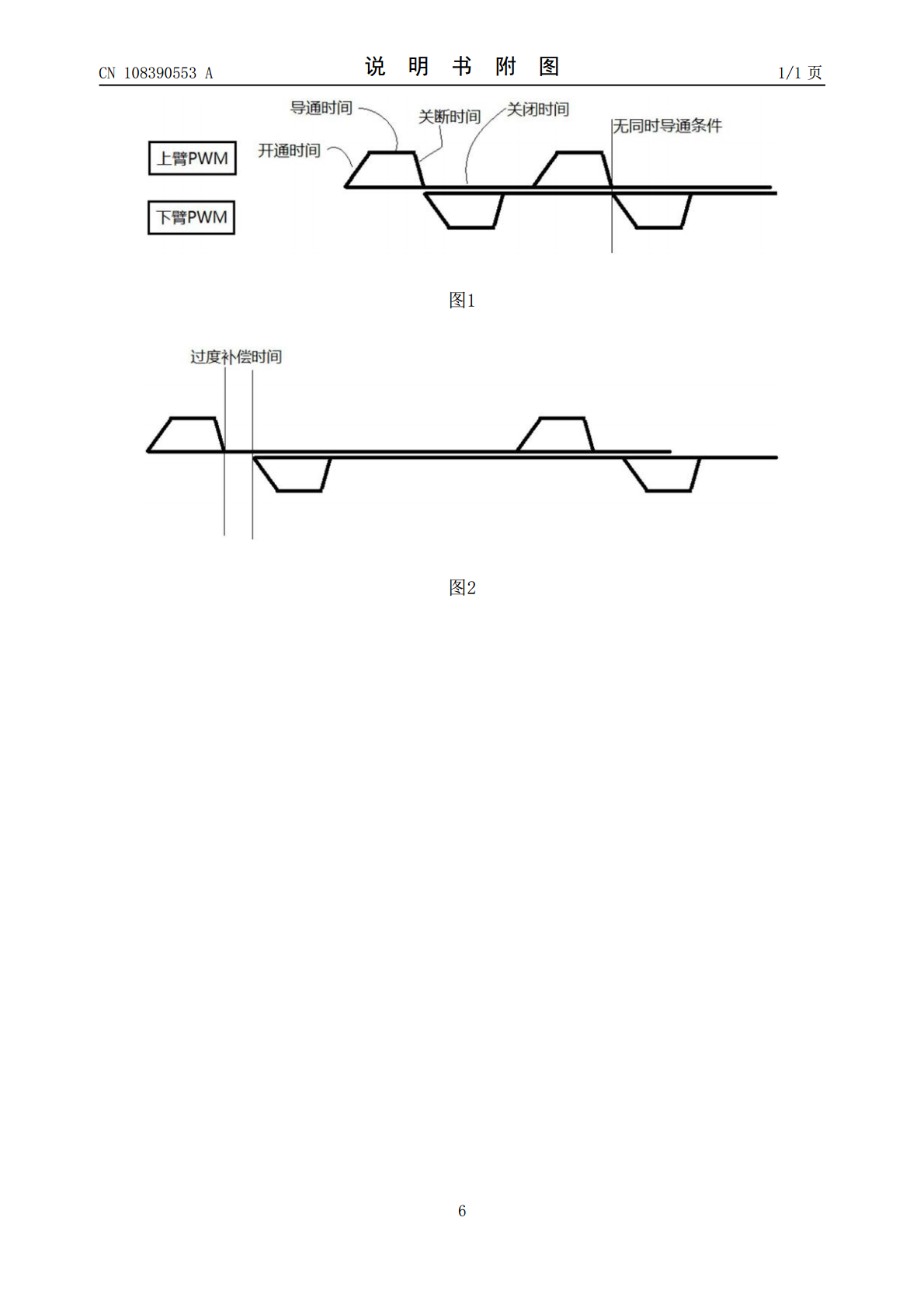
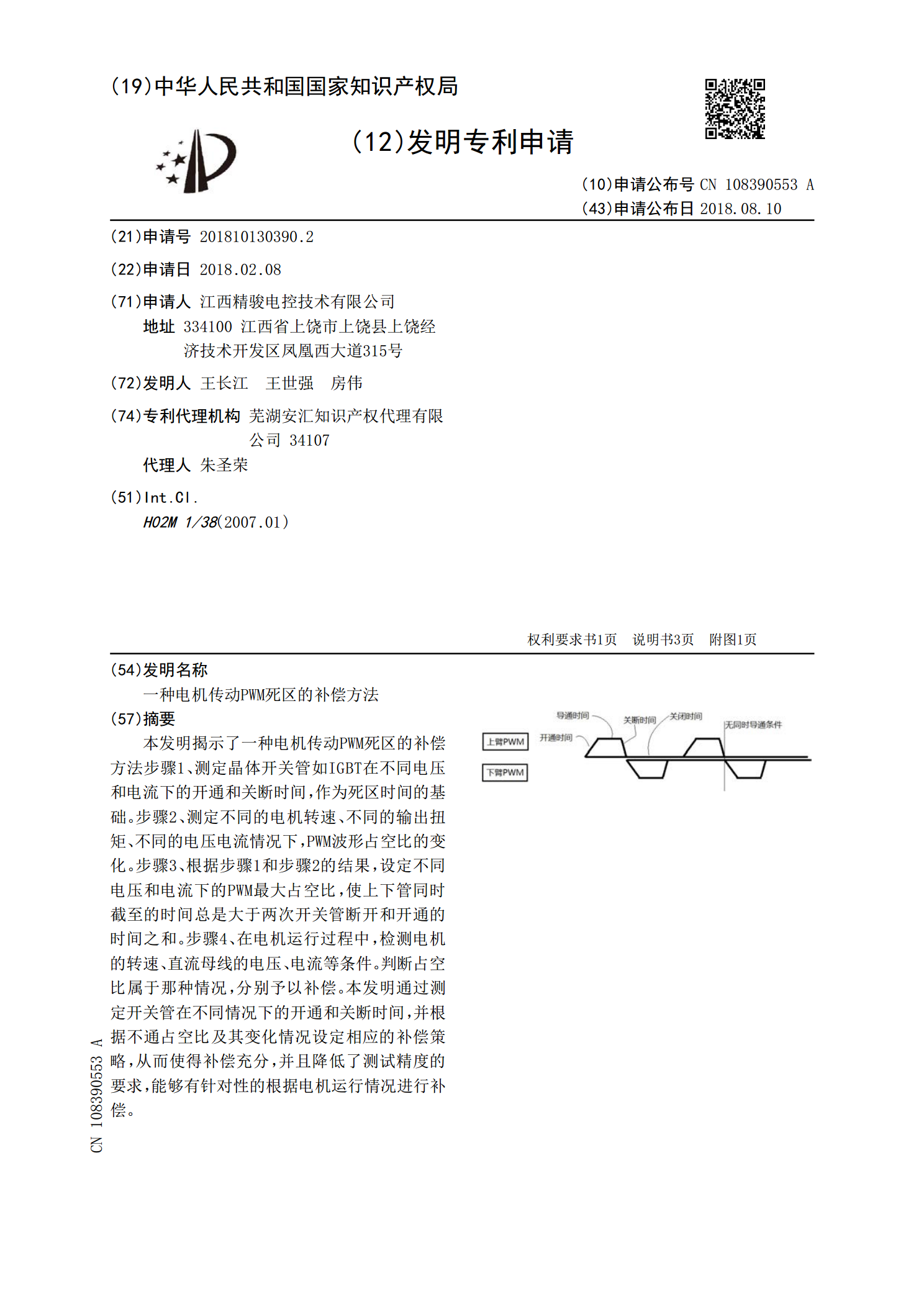
本发明揭示了一种电机传动PWM死区的补偿方法步骤1、测定晶体开关管如IGBT在不同电压和电流下的开通和关断时间,作为死区时间的基础。步骤2、测定不同的电机转速、不同的输出扭矩、不同的电压电流情况下,PWM波形占空比的变化。步骤3、根据步骤1和步骤2的结果,设定不同电压和电流下的PWM最大占空比,使上下管同时截至的时间总是大于两次开关管断开和开通的时间之和。步骤4、在电机运行过程中,检测电机的转速、直流母线的电压、电流等条件。判断占空比属于那种情况,分别予以补偿。本发明通过测定开关管在不同情况下的开通和关断
死区补偿方法、死区补偿装置、电机驱动器及存储介质.pdf
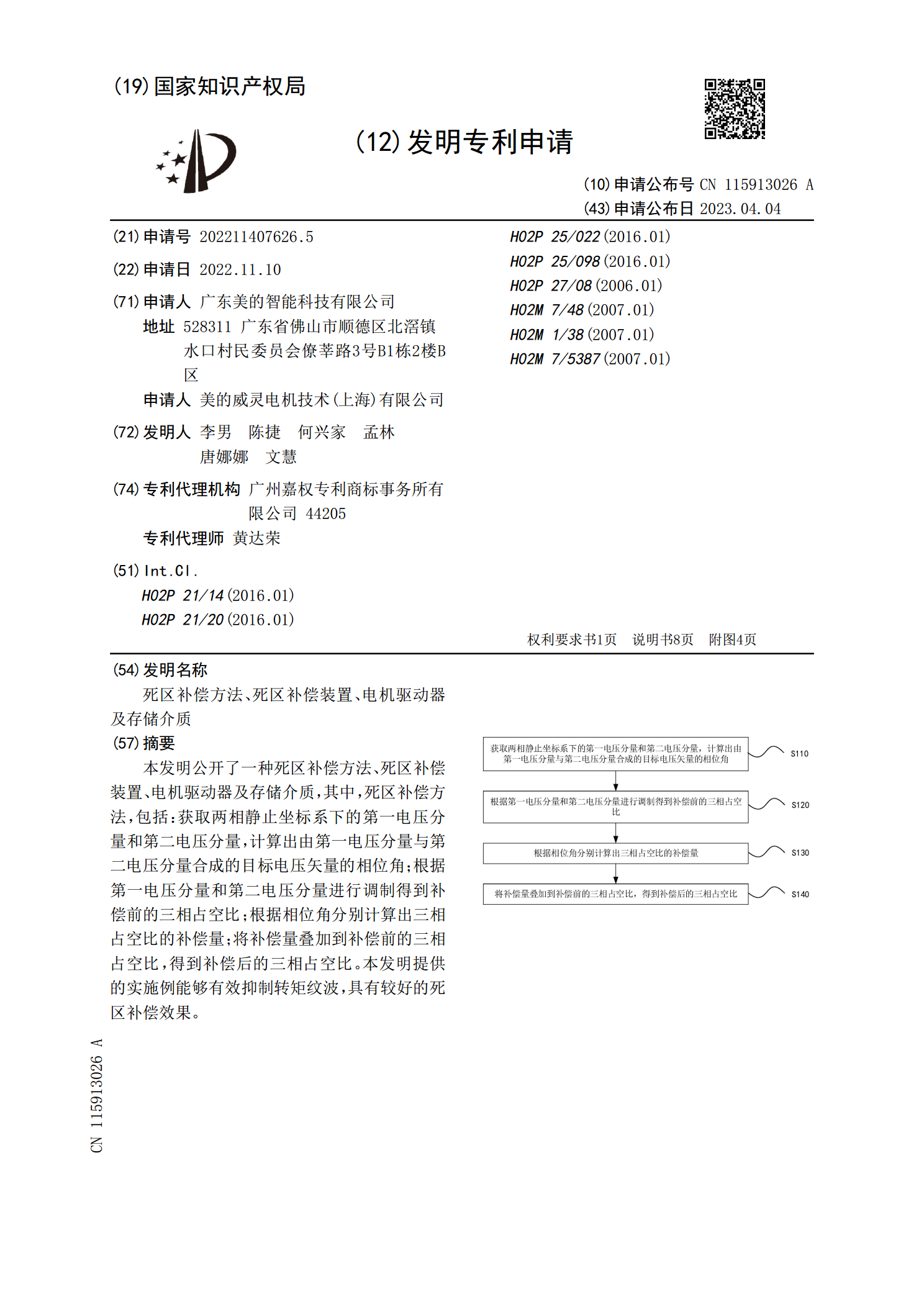
本发明公开了一种死区补偿方法、死区补偿装置、电机驱动器及存储介质,其中,死区补偿方法,包括:获取两相静止坐标系下的第一电压分量和第二电压分量,计算出由第一电压分量与第二电压分量合成的目标电压矢量的相位角;根据第一电压分量和第二电压分量进行调制得到补偿前的三相占空比;根据相位角分别计算出三相占空比的补偿量;将补偿量叠加到补偿前的三相占空比,得到补偿后的三相占空比。本发明提供的实施例能够有效抑制转矩纹波,具有较好的死区补偿效果。

一种离线辨识死区非线性补偿值及死区补偿方法.pdf
本发明公开了一种离线辨识死区非线性补偿值及死区补偿方法,包括以下步骤:(1)离线辨识不同电流幅度情况下的死区补偿值;(2)死区补偿值的线性插值计算;(3)死区补偿。本发明提供的一种离线辨识死区非线性补偿值及死区补偿方法,通过辨识得到一个与电流幅度相关的死区补偿非线性特性曲线表格。根据采样的电机相电流极性和电流幅度,以电流幅度作为输入,查表计算得到电机单相的死区补偿值。本发明可应用于变频器或者伺服驱动器驱动的单相、三相或者多相电机系统中,可有效提升变频器或者伺服驱动器的死区补偿精度,提高电机相电流的正弦度,
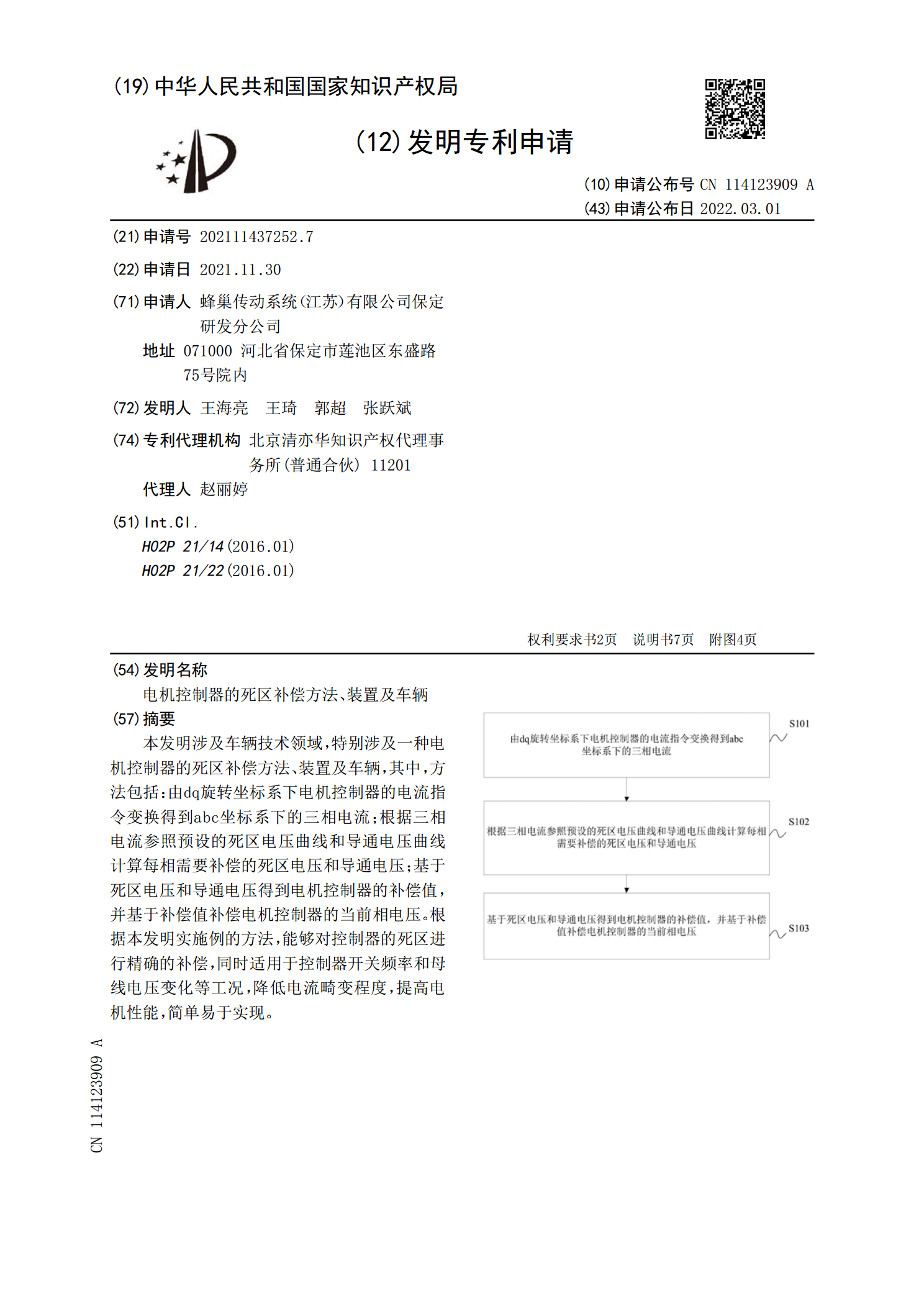
电机控制器的死区补偿方法、装置及车辆.pdf
本发明涉及车辆技术领域,特别涉及一种电机控制器的死区补偿方法、装置及车辆,其中,方法包括:由dq旋转坐标系下电机控制器的电流指令变换得到abc坐标系下的三相电流;根据三相电流参照预设的死区电压曲线和导通电压曲线计算每相需要补偿的死区电压和导通电压;基于死区电压和导通电压得到电机控制器的补偿值,并基于补偿值补偿电机控制器的当前相电压。根据本发明实施例的方法,能够对控制器的死区进行精确的补偿,同时适用于控制器开关频率和母线电压变化等工况,降低电流畸变程度,提高电机性能,简单易于实现。
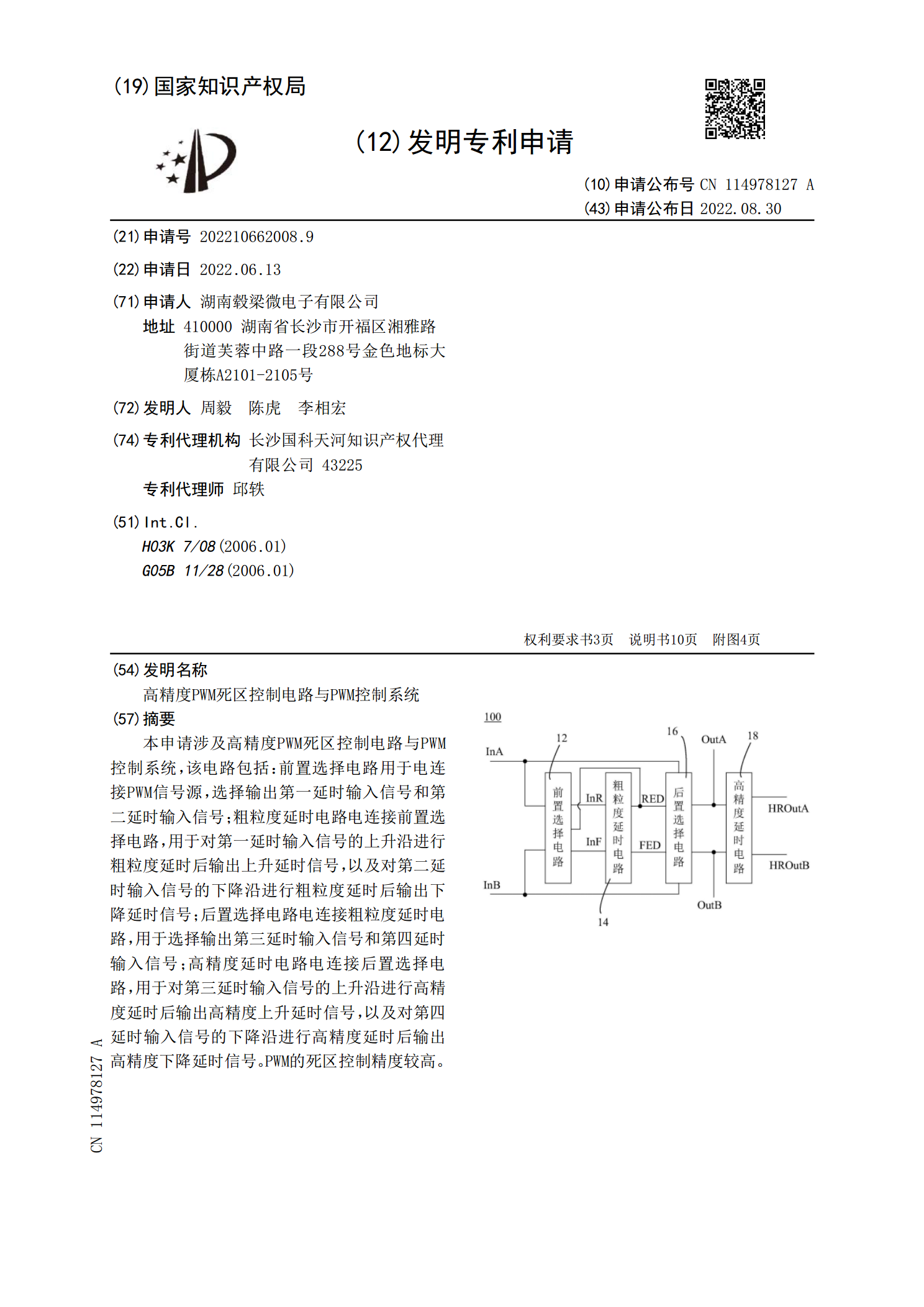
高精度PWM死区控制电路与PWM控制系统.pdf
本申请涉及高精度PWM死区控制电路与PWM控制系统,该电路包括:前置选择电路用于电连接PWM信号源,选择输出第一延时输入信号和第二延时输入信号;粗粒度延时电路电连接前置选择电路,用于对第一延时输入信号的上升沿进行粗粒度延时后输出上升延时信号,以及对第二延时输入信号的下降沿进行粗粒度延时后输出下降延时信号;后置选择电路电连接粗粒度延时电路,用于选择输出第三延时输入信号和第四延时输入信号;高精度延时电路电连接后置选择电路,用于对第三延时输入信号的上升沿进行高精度延时后输出高精度上升延时信号,以及对第四延时输入