
车辆的控制方法、装置及具有其的车辆.pdf

雨星****萌娃

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
车辆的控制方法、装置及具有其的车辆.pdf
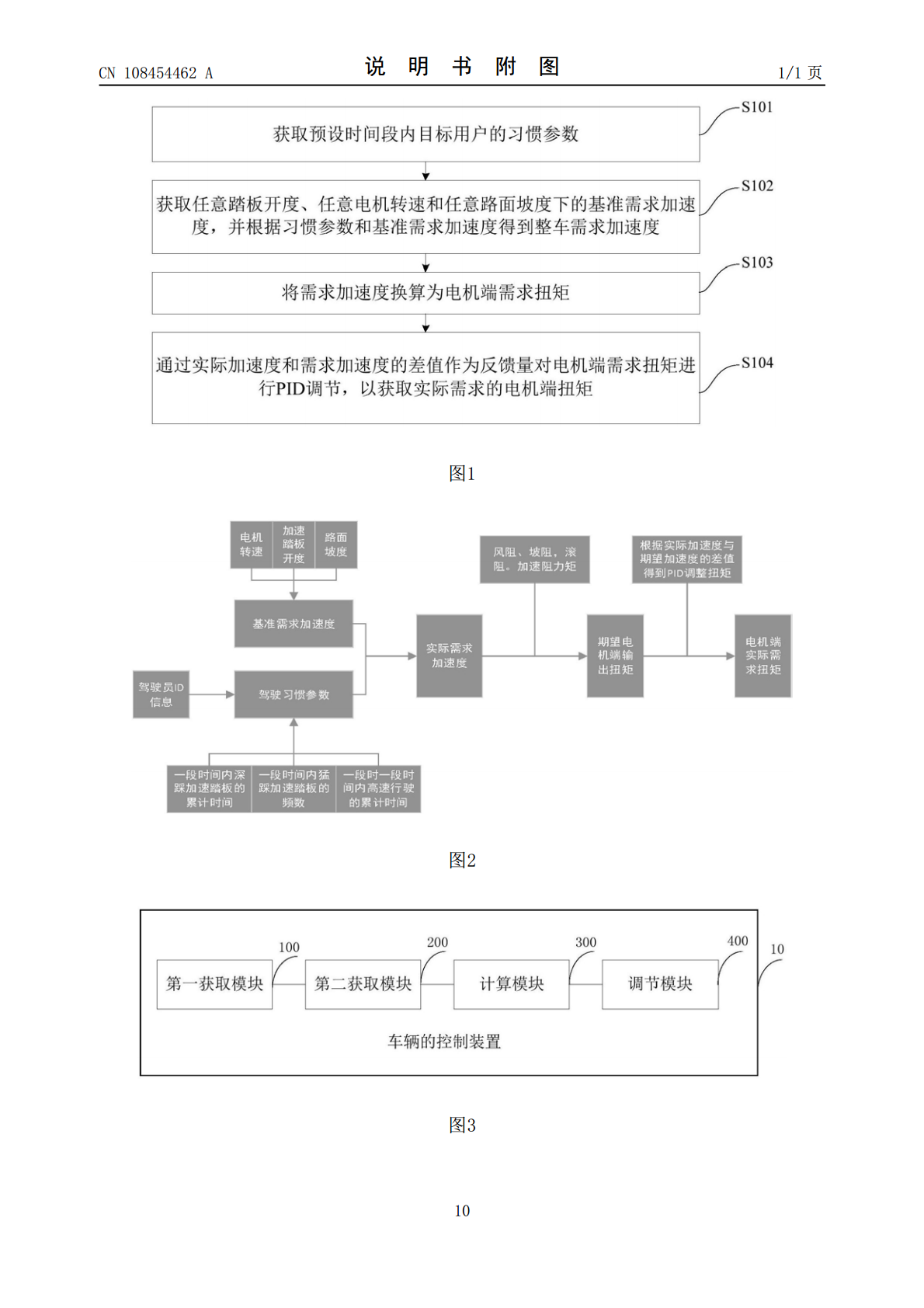
本发明公开了一种车辆的控制方法、装置及具有其的车辆,其中,方法包括:获取预设时间段内目标用户的习惯参数;获取任意踏板开度、任意电机转速和任意路面坡度下的基准需求加速度,并根据习惯参数和基准需求加速度得到整车需求加速度;将需求加速度换算为电机端需求扭矩,并以实际加速度和需求加速度的差值作为反馈量对电机端需求扭矩进行PID调节,从而得到实际需求的电机端扭矩。该方法可以根据驾驶员的驾驶习惯及路况适时的调节整车动力性能,有效提高控制的实时性,提高车辆的智能性和适用性,提升用户的驾驶体验。

车辆的控制方法、装置及具有其的车辆.pdf
本发明公开了一种车辆的控制方法、装置及具有其的车辆,控制方法包括:接收由移动设备发送的请求信息;根据请求信息,判断目标车辆的车况是否满足预设条件;在确定目标车辆的车况满足预设条件的情况下,生成控制策略集。本申请当用户由移动设备发送请求信息,请求信息用于请求目标车辆执行母婴场景出行模式,在确定目标车辆的车况满足预设条件的情况下,生成控制策略集,控制策略集用于控制目标车辆的目标设备执行预设动作,目标设备包括如下至少之一:儿童座椅系统、门锁系统、语音系统、娱乐系统、空调系统、灯光系统和加热杯架,有效的减少了用户
车辆的控制方法、装置及具有其的车辆.pdf
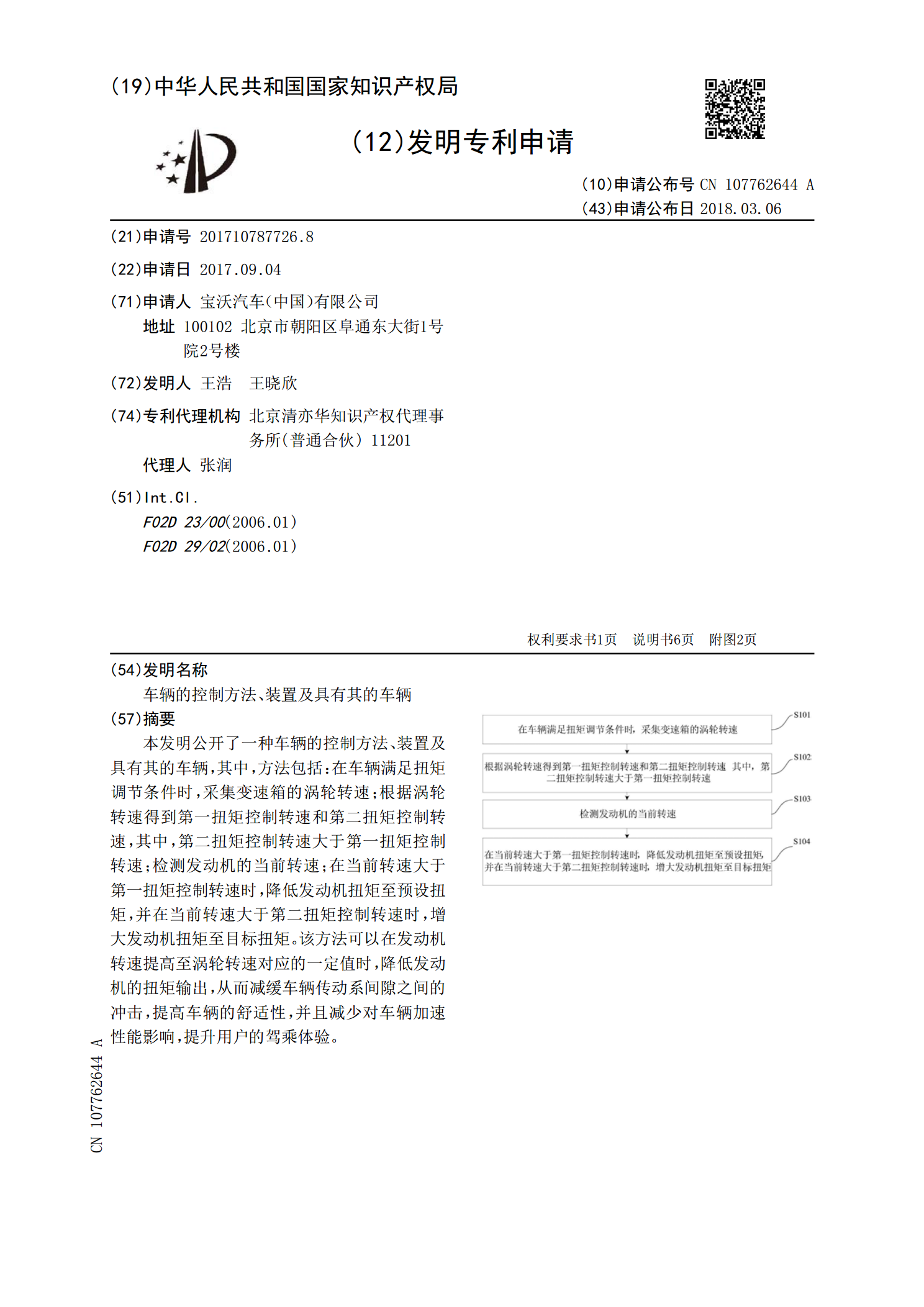
本发明公开了一种车辆的控制方法、装置及具有其的车辆,其中,方法包括:在车辆满足扭矩调节条件时,采集变速箱的涡轮转速;根据涡轮转速得到第一扭矩控制转速和第二扭矩控制转速,其中,第二扭矩控制转速大于第一扭矩控制转速;检测发动机的当前转速;在当前转速大于第一扭矩控制转速时,降低发动机扭矩至预设扭矩,并在当前转速大于第二扭矩控制转速时,增大发动机扭矩至目标扭矩。该方法可以在发动机转速提高至涡轮转速对应的一定值时,降低发动机的扭矩输出,从而减缓车辆传动系间隙之间的冲击,提高车辆的舒适性,并且减少对车辆加速性能影响,
车辆导向装置及具有其的车辆.pdf
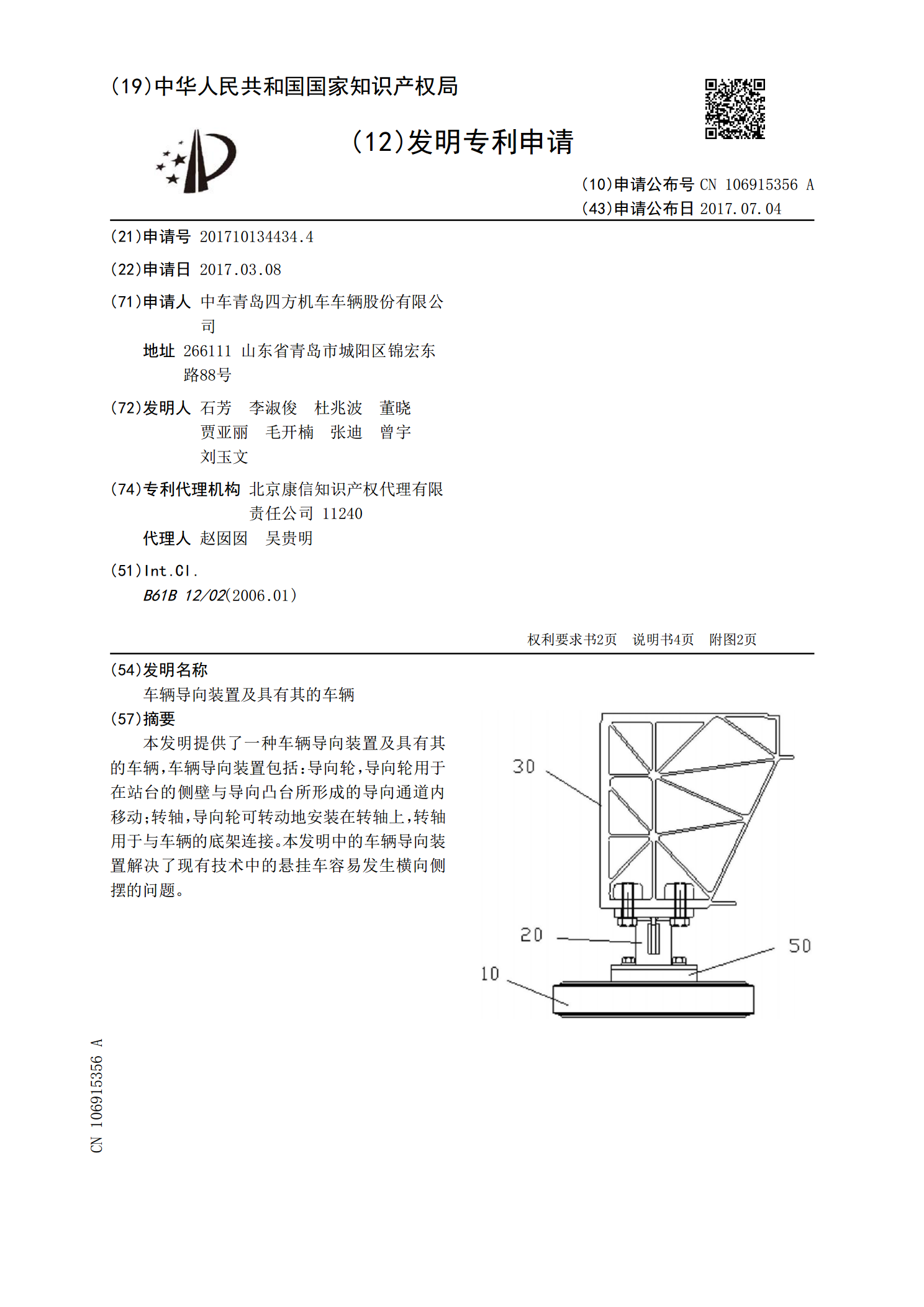
本发明提供了一种车辆导向装置及具有其的车辆,车辆导向装置包括:导向轮,导向轮用于在站台的侧壁与导向凸台所形成的导向通道内移动;转轴,导向轮可转动地安装在转轴上,转轴用于与车辆的底架连接。本发明中的车辆导向装置解决了现有技术中的悬挂车容易发生横向侧摆的问题。
用于车辆的动态力矩控制装置和具有其的车辆.pdf
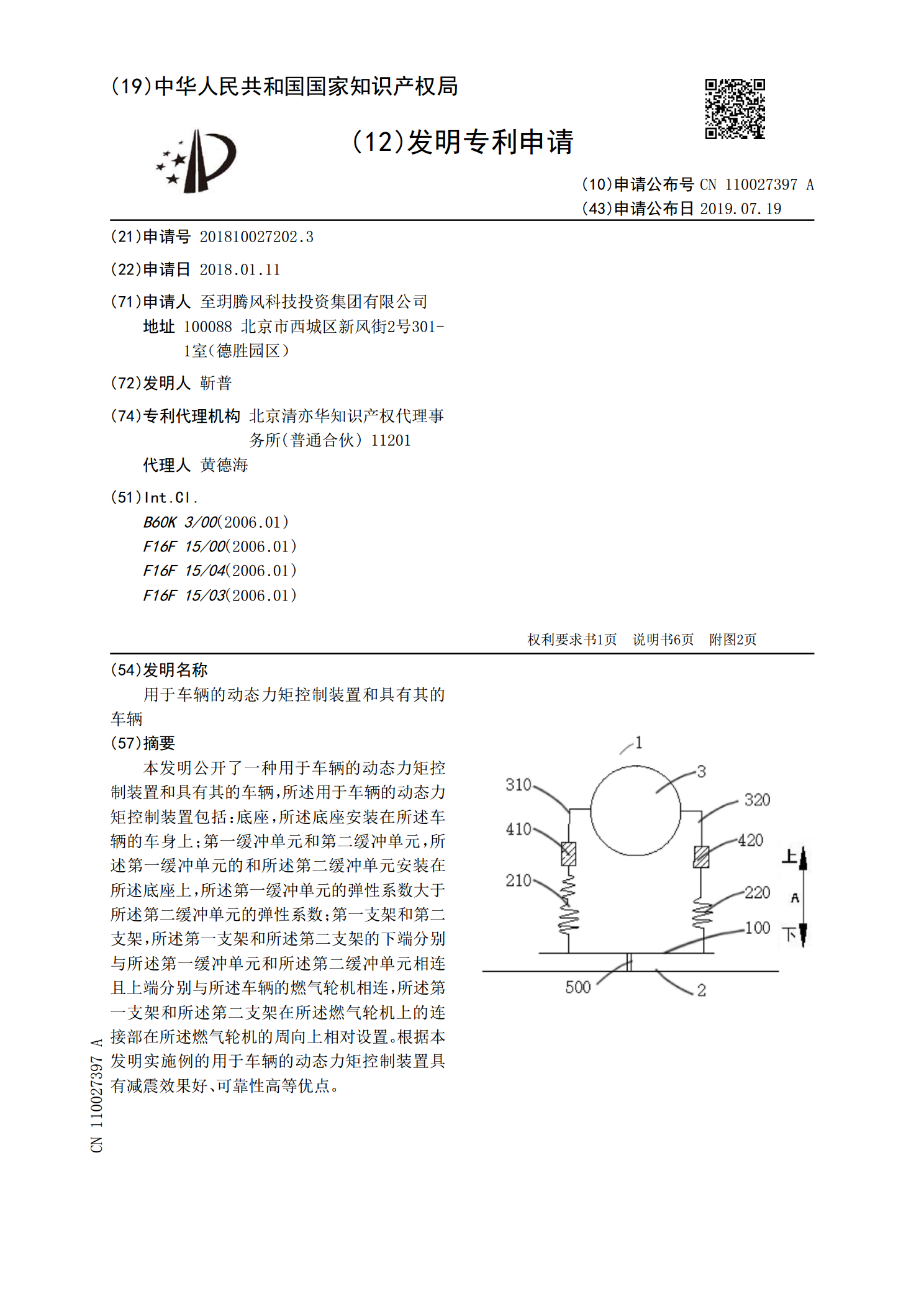
本发明公开了一种用于车辆的动态力矩控制装置和具有其的车辆,所述用于车辆的动态力矩控制装置包括:底座,所述底座安装在所述车辆的车身上;第一缓冲单元和第二缓冲单元,所述第一缓冲单元的和所述第二缓冲单元安装在所述底座上,所述第一缓冲单元的弹性系数大于所述第二缓冲单元的弹性系数;第一支架和第二支架,所述第一支架和所述第二支架的下端分别与所述第一缓冲单元和所述第二缓冲单元相连且上端分别与所述车辆的燃气轮机相连,所述第一支架和所述第二支架在所述燃气轮机上的连接部在所述燃气轮机的周向上相对设置。根据本发明实施例的用于车