
用于自动驾驶车辆的基于多目标决策矩阵的车道决策方法.pdf

是浩****32

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于自动驾驶车辆的基于多目标决策矩阵的车道决策方法.pdf
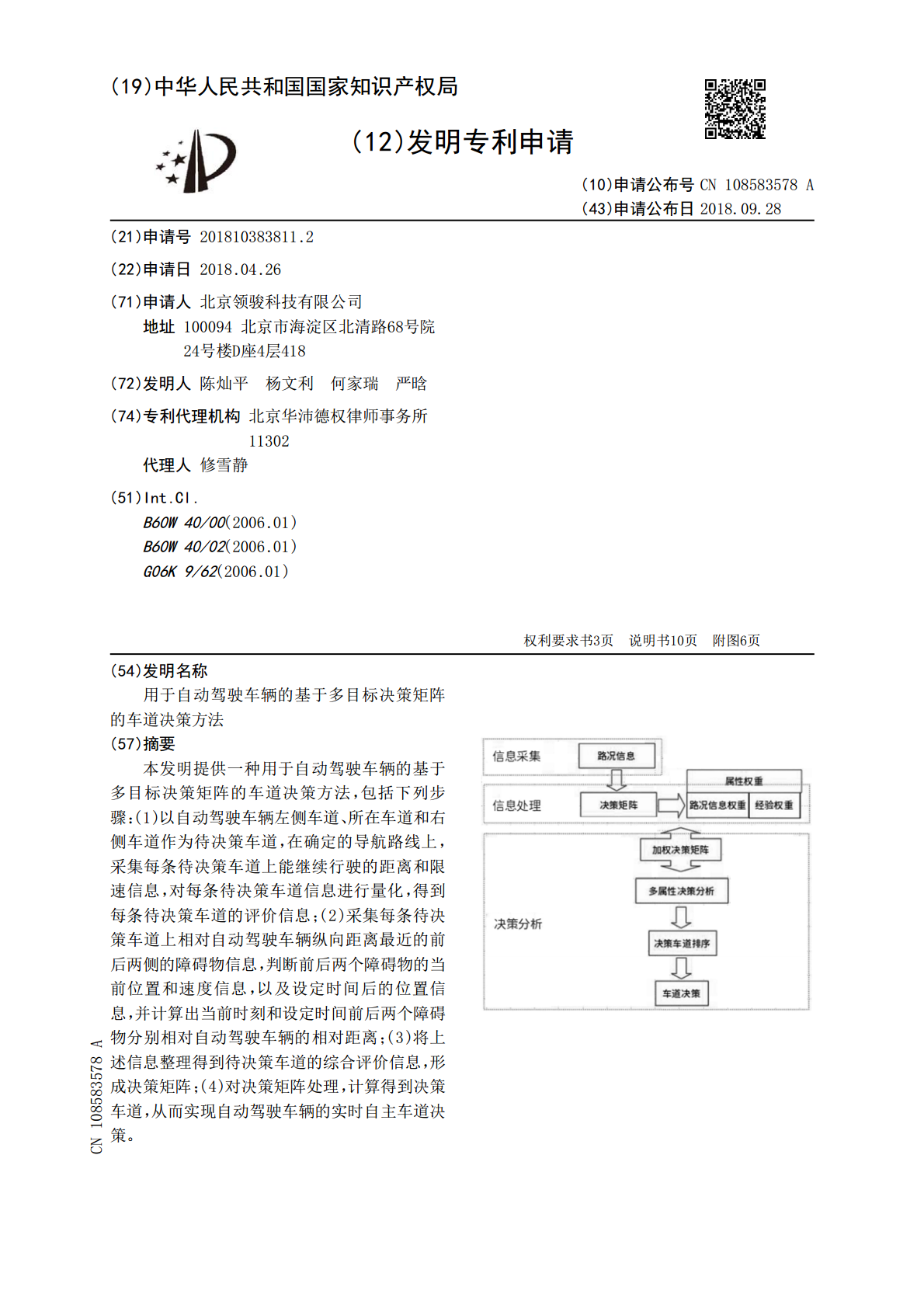
本发明提供一种用于自动驾驶车辆的基于多目标决策矩阵的车道决策方法,包括下列步骤:(1)以自动驾驶车辆左侧车道、所在车道和右侧车道作为待决策车道,在确定的导航路线上,采集每条待决策车道上能继续行驶的距离和限速信息,对每条待决策车道信息进行量化,得到每条待决策车道的评价信息;(2)采集每条待决策车道上相对自动驾驶车辆纵向距离最近的前后两侧的障碍物信息,判断前后两个障碍物的当前位置和速度信息,以及设定时间后的位置信息,并计算出当前时刻和设定时间前后两个障碍物分别相对自动驾驶车辆的相对距离;(3)将上述信息整理得

基于LSTM的自动驾驶车道预测与决策方法研究.docx
基于LSTM的自动驾驶车道预测与决策方法研究摘要:随着自动驾驶技术的逐渐成熟,车道预测与决策一直是自动驾驶系统中的重要问题。本文将基于LSTM神经网络,提出一种自动驾驶车道预测与决策方法。该方法使用LSTM网络从历史车道数据中学习车道变化规律,并决策当前所在车道的最优行驶方式。通过实验验证,该方法在车道预测与决策方面具有较好的性能和实用价值。关键词:自动驾驶、车道预测、决策、LSTM引言:自动驾驶技术已经成为现代交通领域的热门话题。车道预测与决策一直是自动驾驶系统中的重要问题,它涉及到自动驾驶车辆的安全性
一种适用于自动驾驶车辆的车道宽度设计方法.pdf
本发明公开了一种适用于自动驾驶车辆的车道宽度设计方法。本发明包括以下步骤:(1)结合车道宽度设计评估理论、最优车轮路径理论,分析设计车辆宽度对车道宽度的影响,并确定其影响因子;(2)分析天气情况与道路平面几何元素对车辆目标行驶速度的影响,并分别确定其影响因子;(3)分析特殊考虑因素对车道宽度的影响,并确定其影响因子与加权系数;(4)综合考虑以上步骤(1)~(3)中各影响因子对车道宽度的影响,建立车道宽度综合设计模型。本发明解决了现有公路行车道宽度欠缺考虑自动驾驶车辆的不足。

自动驾驶车辆和用于自动驾驶车辆的控制方法.pdf
本发明提供了一种自动驾驶车辆和一种用于自动驾驶车辆的控制方法。该自动驾驶车辆包括用户检测监测装置和起动控制装置。用户检测监测装置在自动驾驶车辆停在目的地之后检测离开自动驾驶车辆的用户作为下车用户并且监测下车用户。起动控制装置在检测到下车用户之后、满足起动条件之前保持自动驾驶车辆的停止状态,并且在满足起动条件的情况下允许自动驾驶车辆的起动。所述起动条件是以下条件之一:指示下车用户至少移出自动驾驶车辆周围的移动判定区域的条件;和指示下车用户存在于移动判定区域中但在同一位置停留持续特定时长或更长时间的条件。
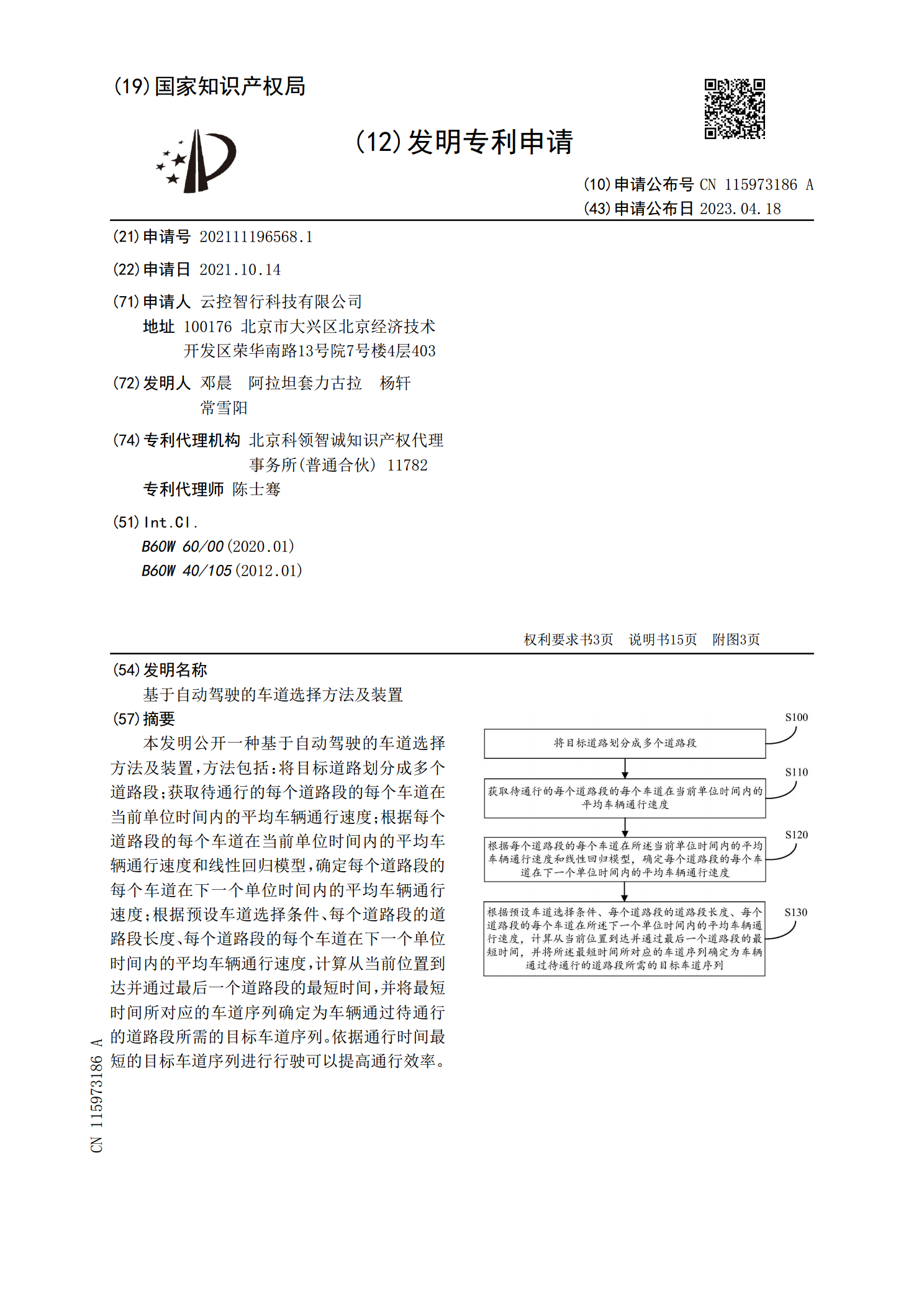
基于自动驾驶的车道选择方法及装置.pdf
本发明公开一种基于自动驾驶的车道选择方法及装置,方法包括:将目标道路划分成多个道路段;获取待通行的每个道路段的每个车道在当前单位时间内的平均车辆通行速度;根据每个道路段的每个车道在当前单位时间内的平均车辆通行速度和线性回归模型,确定每个道路段的每个车道在下一个单位时间内的平均车辆通行速度;根据预设车道选择条件、每个道路段的道路段长度、每个道路段的每个车道在下一个单位时间内的平均车辆通行速度,计算从当前位置到达并通过最后一个道路段的最短时间,并将最短时间所对应的车道序列确定为车辆通过待通行的道路段所需的目标