
失稳车辆的控制方法、装置及智能车辆.pdf

春岚****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

失稳车辆的控制方法、装置及智能车辆.pdf
本申请实施例提供了一种失稳车辆的控制方法、装置及智能车辆。本申请实施例提供的失稳车辆的控制方法包括:根据车辆的速度参数和车辆的质心参数,获取第一前馈前轮转角,第一前馈前轮转角为模拟车辆的前轴侧向力处于横向轮胎力模型的线性阶段时对应的前轮转角;根据第一前馈前轮转角和车辆的前轴侧向力对应的轮胎侧偏角,预测得到第二前馈前轮转角;根据第一前馈前轮转角与第二前馈前轮转角之和以及车辆的前轮所允许转动的最大角度,得到主动前轮转角,以在车辆的前轮转角被控制为主动前轮转角时,车辆从失稳状态进入稳定状态。本申请实施例提供的种
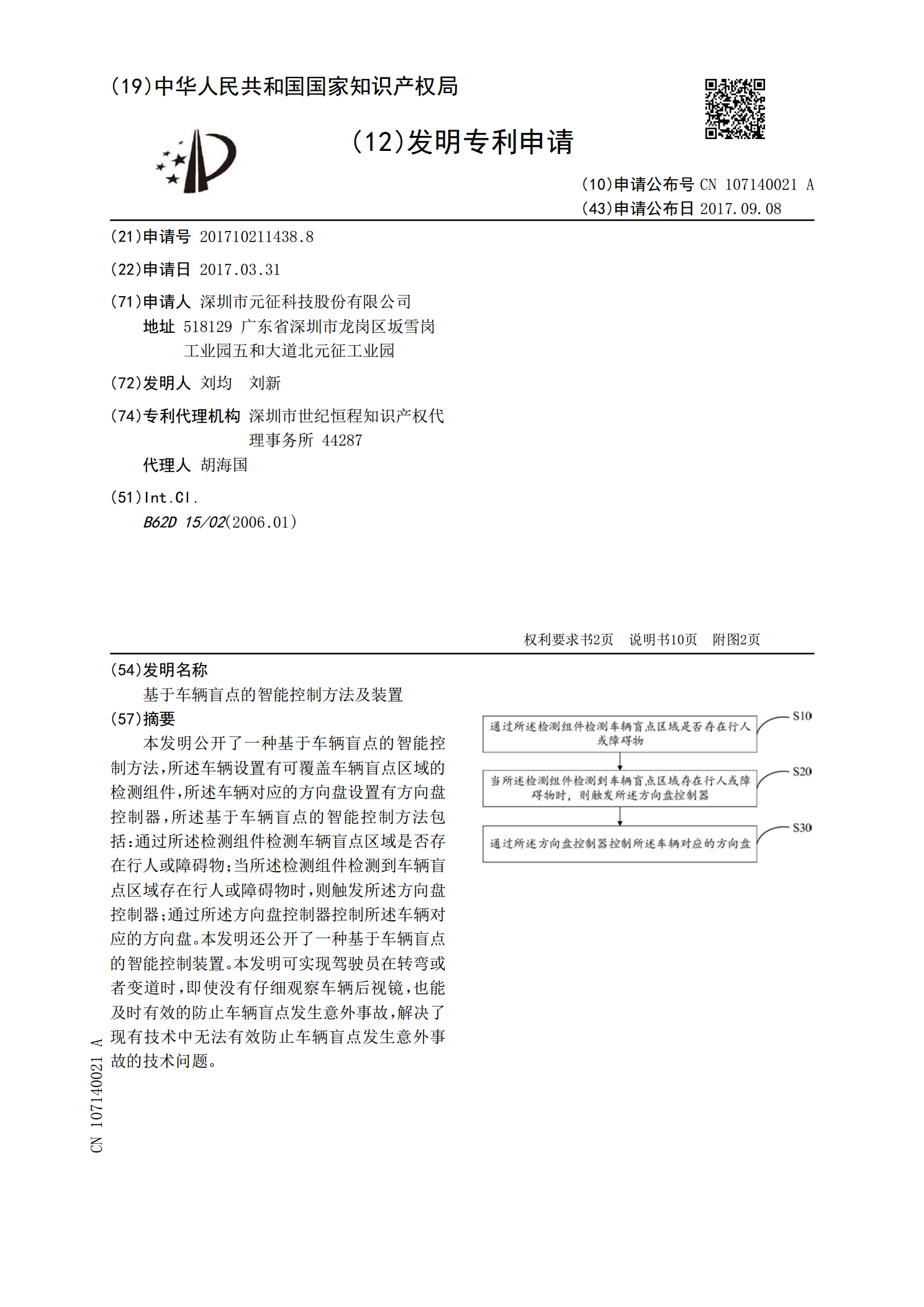
基于车辆盲点的智能控制方法及装置.pdf
本发明公开了一种基于车辆盲点的智能控制方法,所述车辆设置有可覆盖车辆盲点区域的检测组件,所述车辆对应的方向盘设置有方向盘控制器,所述基于车辆盲点的智能控制方法包括:通过所述检测组件检测车辆盲点区域是否存在行人或障碍物;当所述检测组件检测到车辆盲点区域存在行人或障碍物时,则触发所述方向盘控制器;通过所述方向盘控制器控制所述车辆对应的方向盘。本发明还公开了一种基于车辆盲点的智能控制装置。本发明可实现驾驶员在转弯或者变道时,即使没有仔细观察车辆后视镜,也能及时有效的防止车辆盲点发生意外事故,解决了现有技术中无法

智能驾驶矿用车辆失稳状态检测方法、装置、设备及介质.pdf
本公开提供了一种智能驾驶矿用车辆失稳状态检测方法、装置、设备及介质。方法包括:建立矿用车辆的运动模型,运动模型中包含表征矿用车辆稳定状态的状态参数,状态参数包括车辆侧偏角、前轮胎侧偏角、后轮胎侧偏角、横摆角速率、横向加速度、车轮滑动率、侧倾角、侧倾角速率、俯仰角、俯仰角速率中的一个及以上参数;根据矿用车辆的路径规划值和装载状态,设置状态参数所对应的稳定范围;获取矿用车辆的当前状态参数;根据当前状态参数以及稳定范围,确定矿用车辆的稳定状态信息。能够检测出矿用车辆的各种失稳状态,提高了矿用车辆在复杂工作环境中

车辆的控制方法、车辆系统及车辆的控制装置.pdf
在转向装置被进行了打轮操作时进行对车辆附加减速度的车辆姿态控制的车辆的控制方法中,适当确保下坡路的行驶时该控制下的车辆转弯性能的改善效果。车辆的控制方法具有如下的工序:基于由转向角传感器(8)检测到的转向角,判定包含方向盘(6)等的转向装置是否被进行了打轮操作;在判定为转向装置被进行了打轮操作时,降低电动发电机(4)的驱动力对车辆(1)附加减速度以控制车辆姿态;在由坡度传感器(12)检测到的路面坡度为表示下坡侧的坡度的第1值时,相较于由坡度传感器(12)检测到的路面坡度为与第1值相比表示平坦侧的坡度的第2
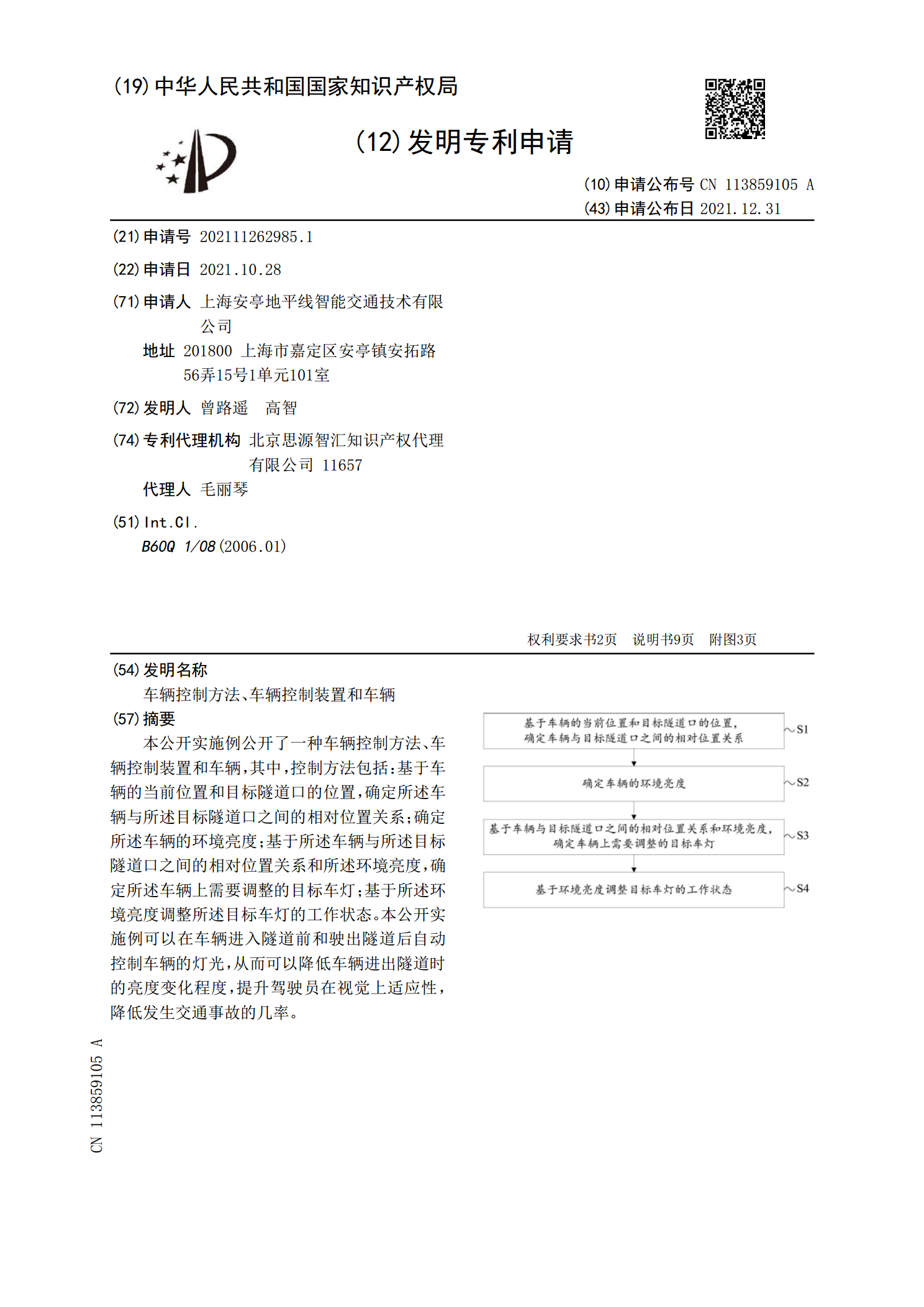
车辆控制方法、车辆控制装置和车辆.pdf
本公开实施例公开了一种车辆控制方法、车辆控制装置和车辆,其中,控制方法包括:基于车辆的当前位置和目标隧道口的位置,确定所述车辆与所述目标隧道口之间的相对位置关系;确定所述车辆的环境亮度;基于所述车辆与所述目标隧道口之间的相对位置关系和所述环境亮度,确定所述车辆上需要调整的目标车灯;基于所述环境亮度调整所述目标车灯的工作状态。本公开实施例可以在车辆进入隧道前和驶出隧道后自动控制车辆的灯光,从而可以降低车辆进出隧道时的亮度变化程度,提升驾驶员在视觉上适应性,降低发生交通事故的几率。