
一种姿态确定方法、装置、设备及存储介质.pdf

傲丝****账号

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种姿态确定方法、装置、设备及存储介质.pdf
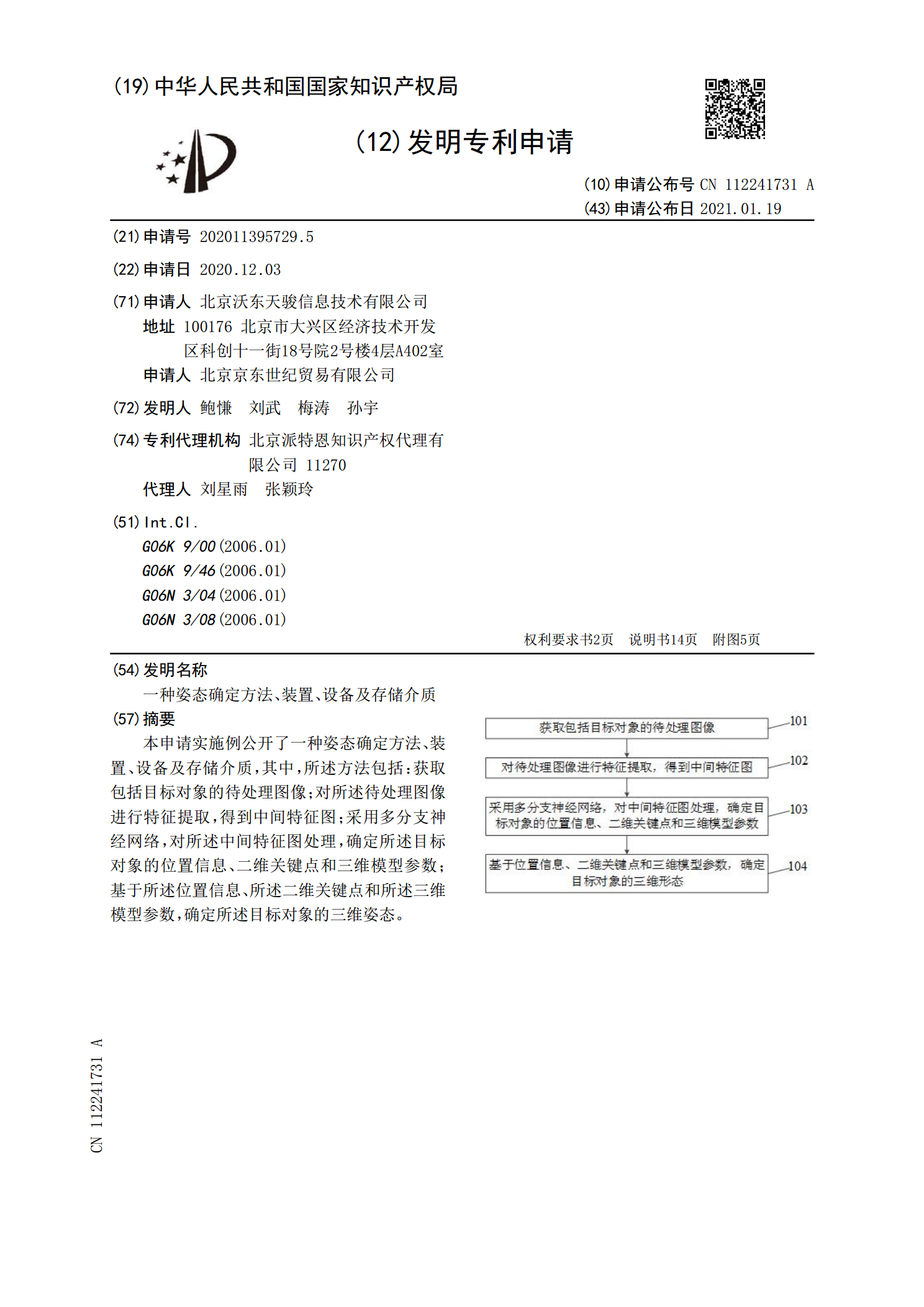
本申请实施例公开了一种姿态确定方法、装置、设备及存储介质,其中,所述方法包括:获取包括目标对象的待处理图像;对所述待处理图像进行特征提取,得到中间特征图;采用多分支神经网络,对所述中间特征图处理,确定所述目标对象的位置信息、二维关键点和三维模型参数;基于所述位置信息、所述二维关键点和所述三维模型参数,确定所述目标对象的三维姿态。
人体姿态确定方法、装置、设备及存储介质.pdf
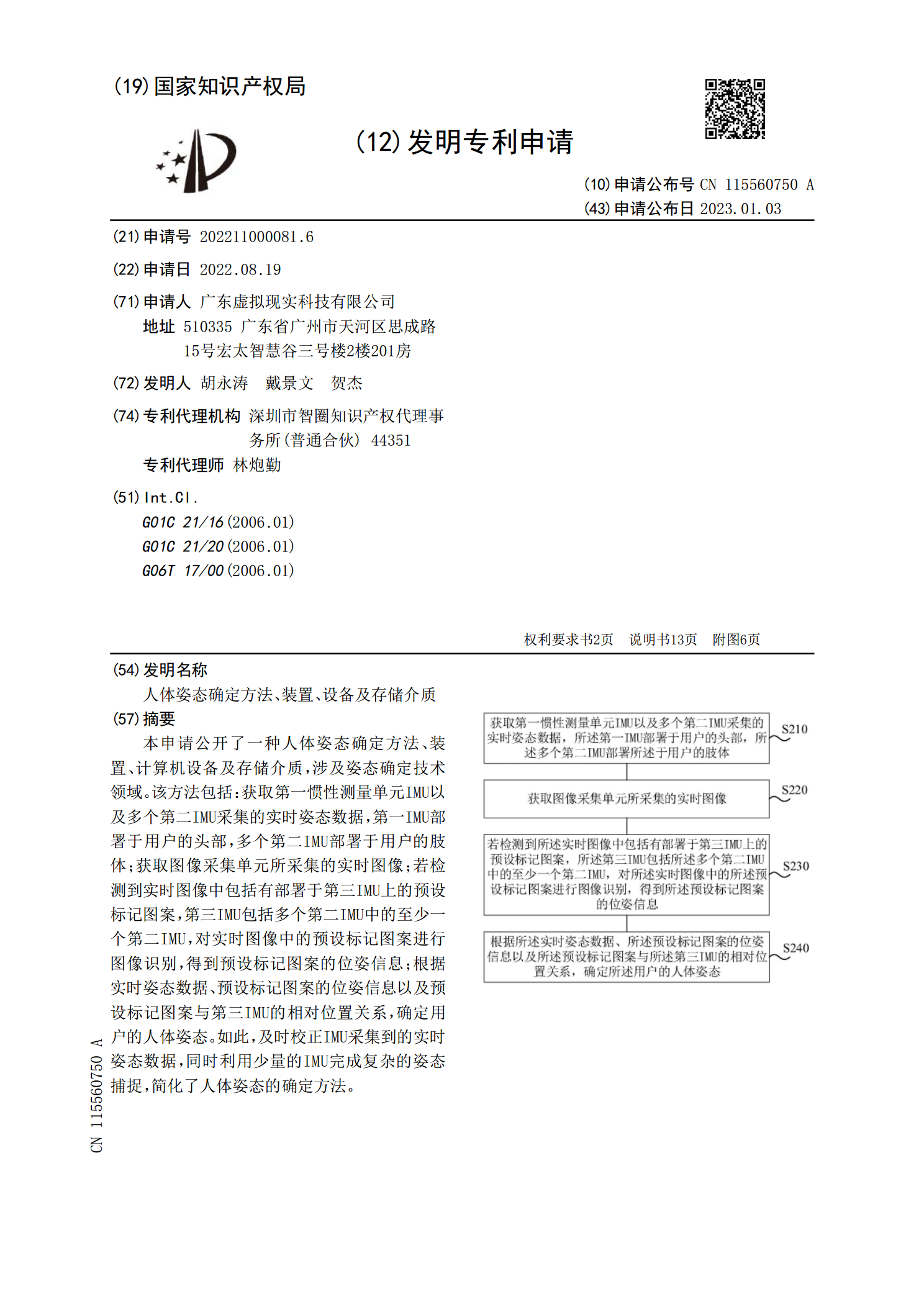
本申请公开了一种人体姿态确定方法、装置、计算机设备及存储介质,涉及姿态确定技术领域。该方法包括:获取第一惯性测量单元IMU以及多个第二IMU采集的实时姿态数据,第一IMU部署于用户的头部,多个第二IMU部署于用户的肢体;获取图像采集单元所采集的实时图像;若检测到实时图像中包括有部署于第三IMU上的预设标记图案,第三IMU包括多个第二IMU中的至少一个第二IMU,对实时图像中的预设标记图案进行图像识别,得到预设标记图案的位姿信息;根据实时姿态数据、预设标记图案的位姿信息以及预设标记图案与第三IMU的相对位置
人脸姿态的确定方法、装置、设备及存储介质.pdf
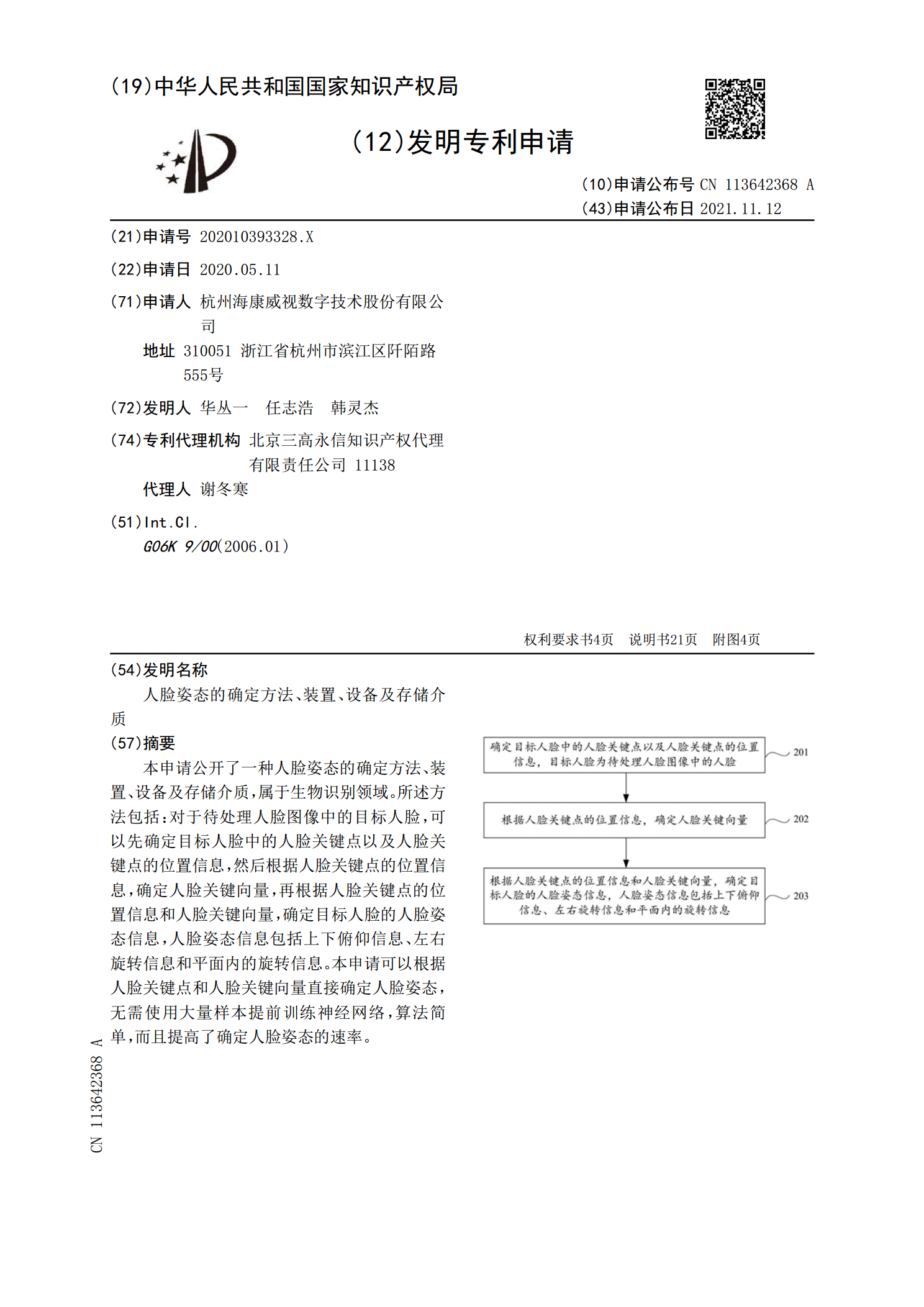
本申请公开了一种人脸姿态的确定方法、装置、设备及存储介质,属于生物识别领域。所述方法包括:对于待处理人脸图像中的目标人脸,可以先确定目标人脸中的人脸关键点以及人脸关键点的位置信息,然后根据人脸关键点的位置信息,确定人脸关键向量,再根据人脸关键点的位置信息和人脸关键向量,确定目标人脸的人脸姿态信息,人脸姿态信息包括上下俯仰信息、左右旋转信息和平面内的旋转信息。本申请可以根据人脸关键点和人脸关键向量直接确定人脸姿态,无需使用大量样本提前训练神经网络,算法简单,而且提高了确定人脸姿态的速率。
一种飞行姿态序列确定方法、装置、设备和存储介质.pdf
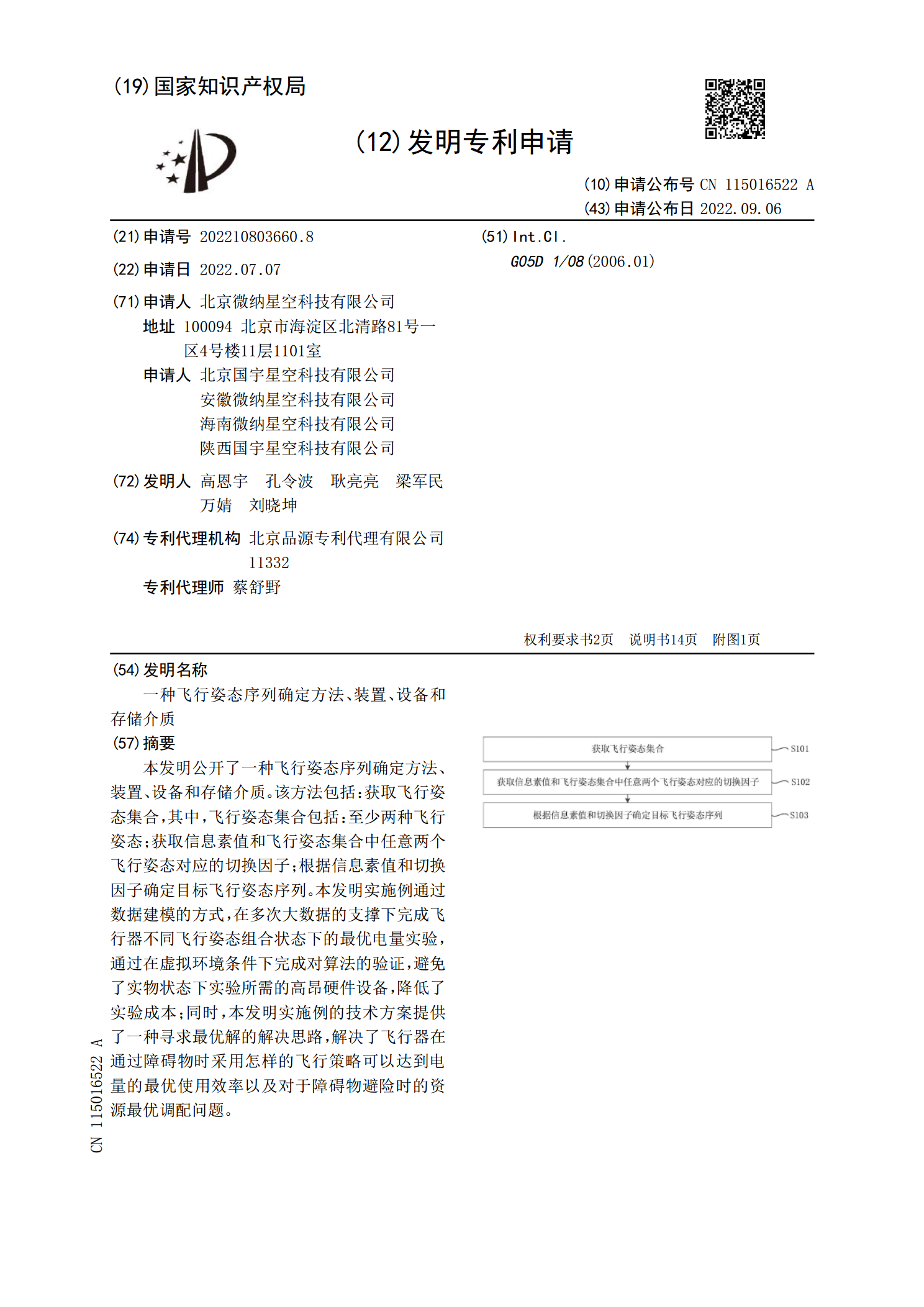
本发明公开了一种飞行姿态序列确定方法、装置、设备和存储介质。该方法包括:获取飞行姿态集合,其中,飞行姿态集合包括:至少两种飞行姿态;获取信息素值和飞行姿态集合中任意两个飞行姿态对应的切换因子;根据信息素值和切换因子确定目标飞行姿态序列。本发明实施例通过数据建模的方式,在多次大数据的支撑下完成飞行器不同飞行姿态组合状态下的最优电量实验,通过在虚拟环境条件下完成对算法的验证,避免了实物状态下实验所需的高昂硬件设备,降低了实验成本;同时,本发明实施例的技术方案提供了一种寻求最优解的解决思路,解决了飞行器在通过障
一种姿态信息确定方法、装置、电子设备以及存储介质.pdf
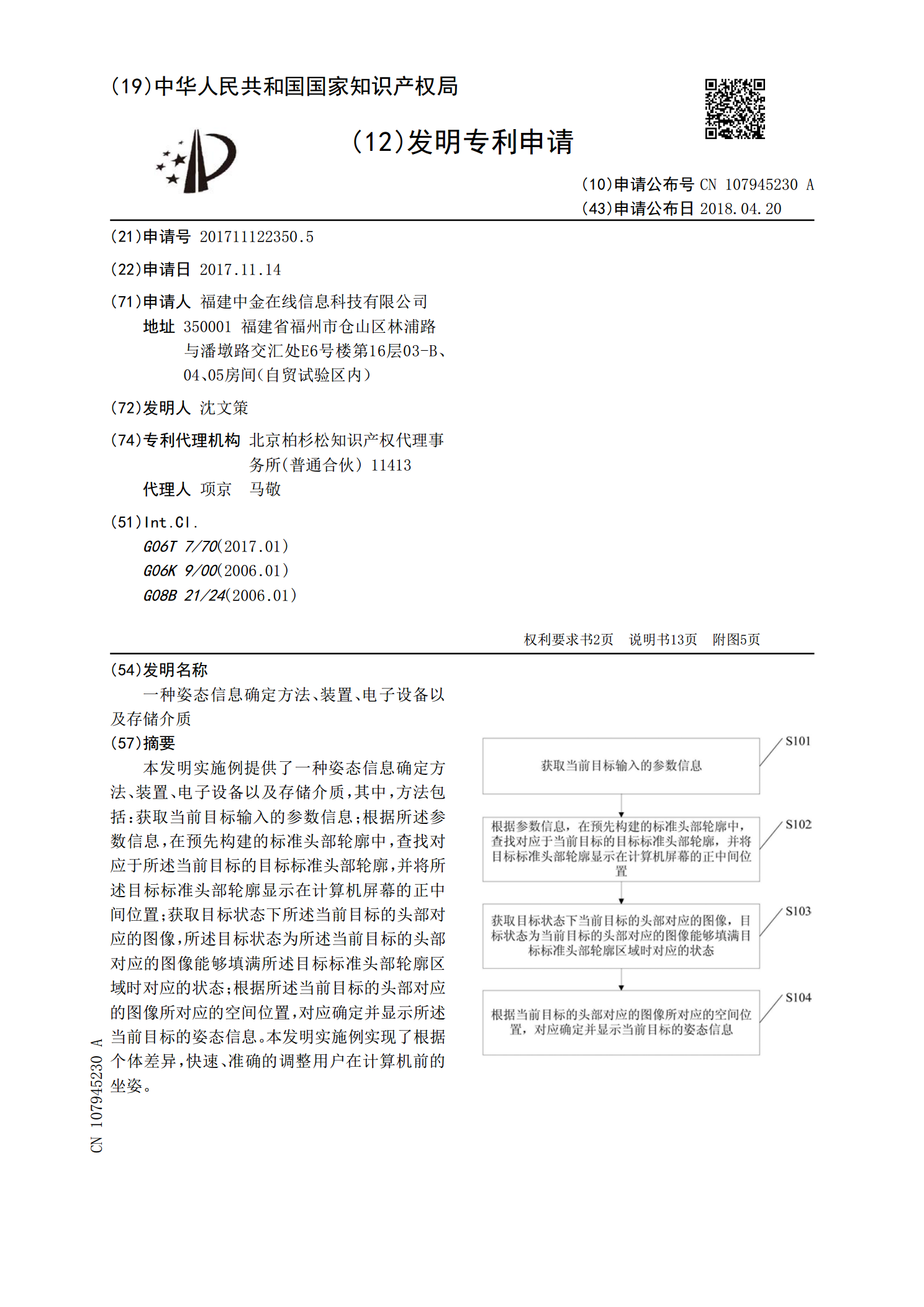
本发明实施例提供了一种姿态信息确定方法、装置、电子设备以及存储介质,其中,方法包括:获取当前目标输入的参数信息;根据所述参数信息,在预先构建的标准头部轮廓中,查找对应于所述当前目标的目标标准头部轮廓,并将所述目标标准头部轮廓显示在计算机屏幕的正中间位置;获取目标状态下所述当前目标的头部对应的图像,所述目标状态为所述当前目标的头部对应的图像能够填满所述目标标准头部轮廓区域时对应的状态;根据所述当前目标的头部对应的图像所对应的空间位置,对应确定并显示所述当前目标的姿态信息。本发明实施例实现了根据个体差异,快速