
标注位姿信息的方法、装置及计算机可读存储介质.pdf

是秋****写意

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
标注位姿信息的方法、装置及计算机可读存储介质.pdf
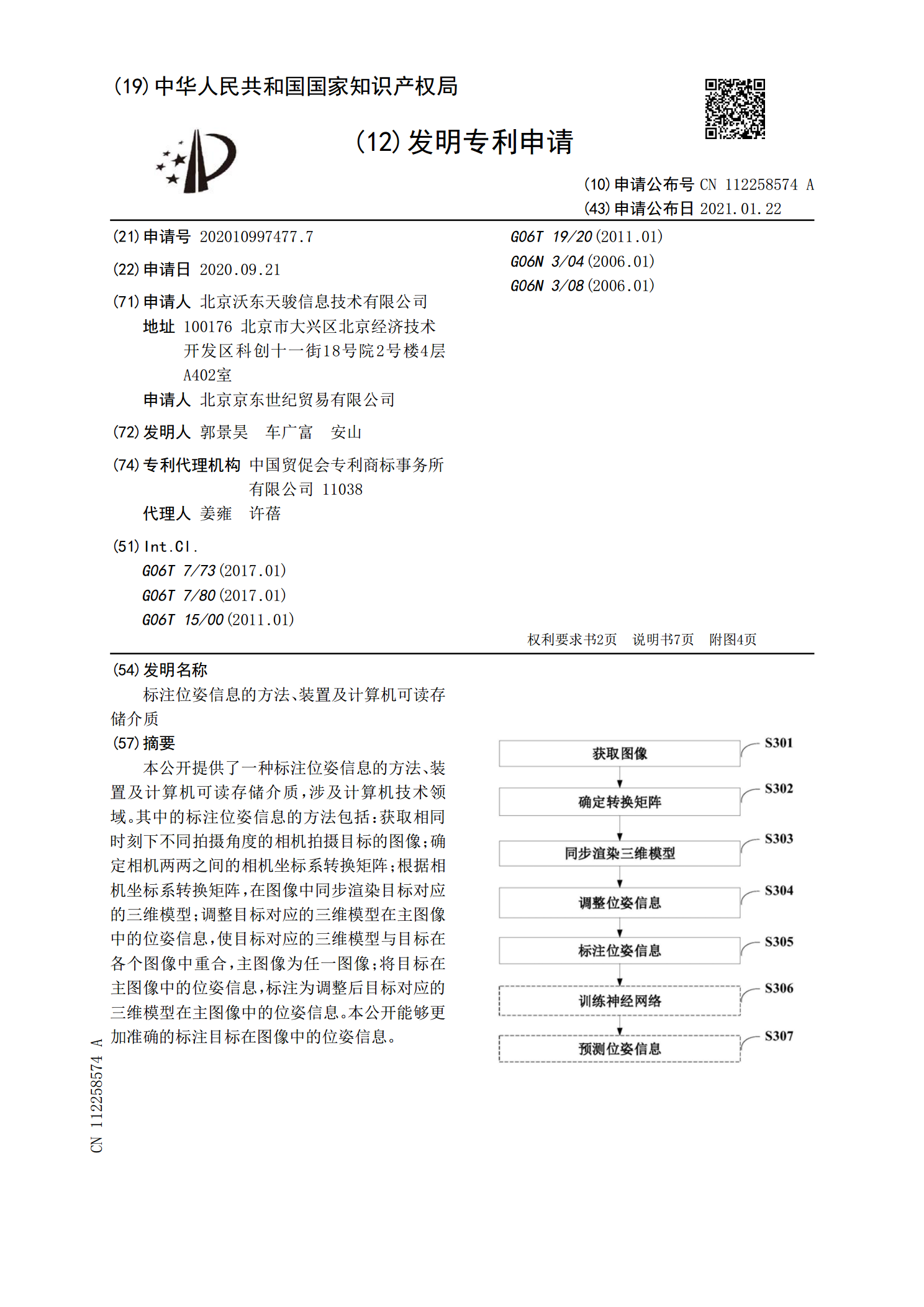
本公开提供了一种标注位姿信息的方法、装置及计算机可读存储介质,涉及计算机技术领域。其中的标注位姿信息的方法包括:获取相同时刻下不同拍摄角度的相机拍摄目标的图像;确定相机两两之间的相机坐标系转换矩阵;根据相机坐标系转换矩阵,在图像中同步渲染目标对应的三维模型;调整目标对应的三维模型在主图像中的位姿信息,使目标对应的三维模型与目标在各个图像中重合,主图像为任一图像;将目标在主图像中的位姿信息,标注为调整后目标对应的三维模型在主图像中的位姿信息。本公开能够更加准确的标注目标在图像中的位姿信息。
估计位姿的方法、装置及计算机可读存储介质.pdf
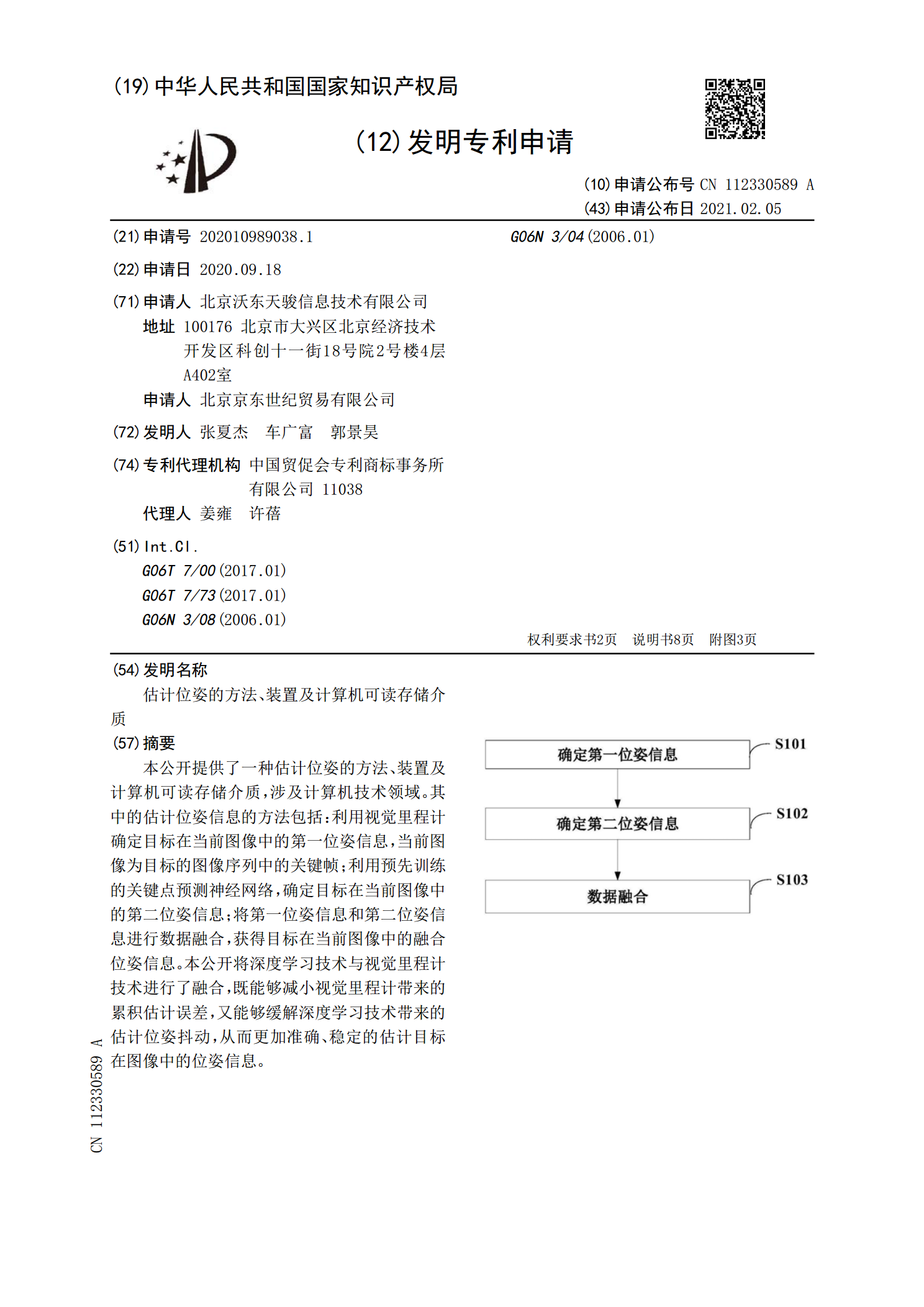
本公开提供了一种估计位姿的方法、装置及计算机可读存储介质,涉及计算机技术领域。其中的估计位姿信息的方法包括:利用视觉里程计确定目标在当前图像中的第一位姿信息,当前图像为目标的图像序列中的关键帧;利用预先训练的关键点预测神经网络,确定目标在当前图像中的第二位姿信息;将第一位姿信息和第二位姿信息进行数据融合,获得目标在当前图像中的融合位姿信息。本公开将深度学习技术与视觉里程计技术进行了融合,既能够减小视觉里程计带来的累积估计误差,又能够缓解深度学习技术带来的估计位姿抖动,从而更加准确、稳定的估计目标在图像中的
标注方法、装置以及计算机可读存储介质.pdf
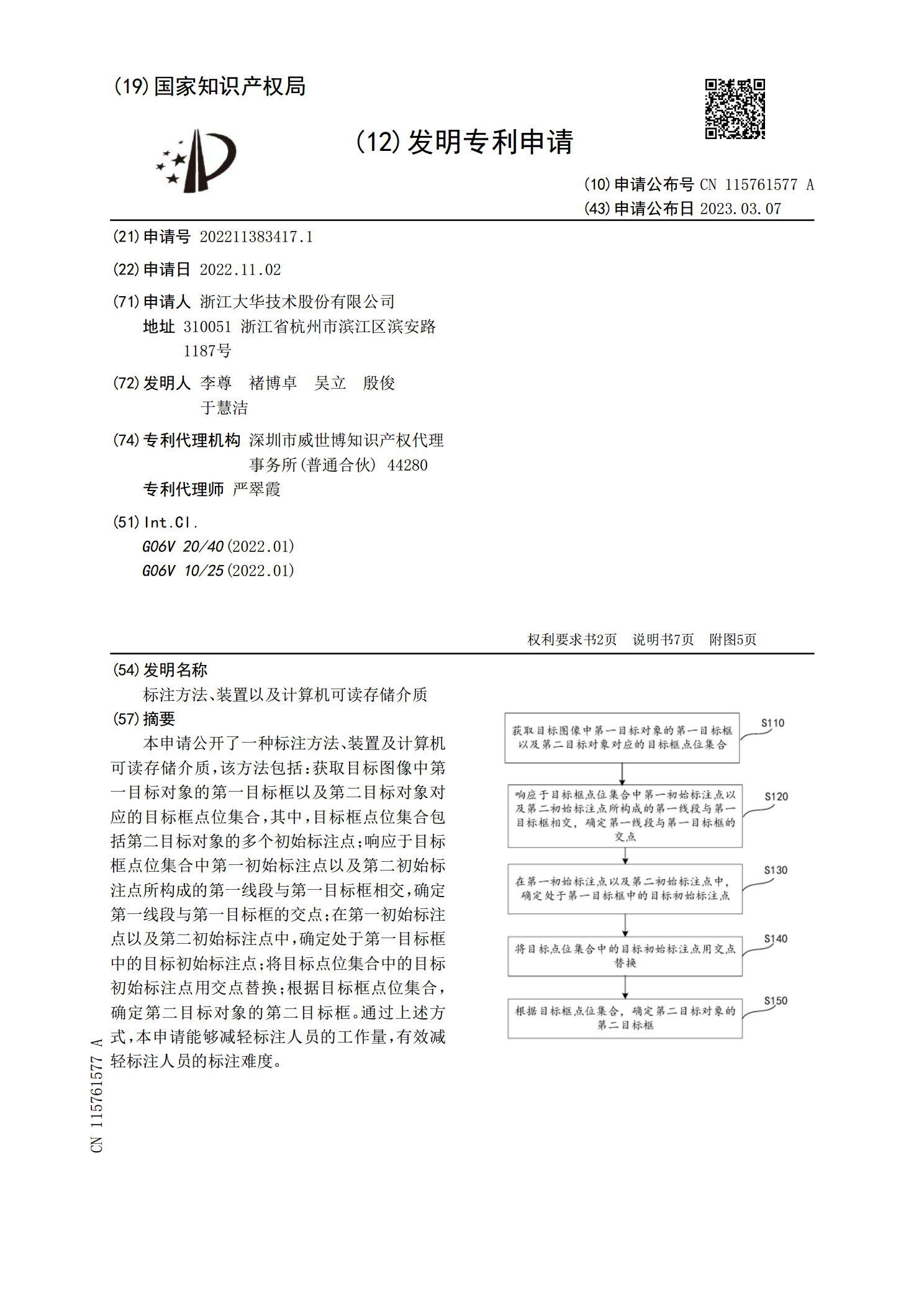
本申请公开了一种标注方法、装置及计算机可读存储介质,该方法包括:获取目标图像中第一目标对象的第一目标框以及第二目标对象对应的目标框点位集合,其中,目标框点位集合包括第二目标对象的多个初始标注点;响应于目标框点位集合中第一初始标注点以及第二初始标注点所构成的第一线段与第一目标框相交,确定第一线段与第一目标框的交点;在第一初始标注点以及第二初始标注点中,确定处于第一目标框中的目标初始标注点;将目标点位集合中的目标初始标注点用交点替换;根据目标框点位集合,确定第二目标对象的第二目标框。通过上述方式,本申请能够减

位姿信息的处理方法、装置、设备及存储介质.pdf
本发明提供一种位姿信息的处理方法、装置、设备及存储介质。通过获取光学定位设备发送的待定位设备的光学定位数据,以及电磁收发器发送的待定位设备的电磁定位数据,根据光学定位数据和电磁定位数据的数据稳定性等级,对光学定位数据和电磁定位数据进行数据融合,得到待定位设备的位置信息。通过上述数据处理过程,可以避免光线遮挡或者电磁干扰对定位数据的影响,得到较为稳定的待定位设备的定位数据。
一种位姿标注方法、装置、电子设备及存储介质.pdf
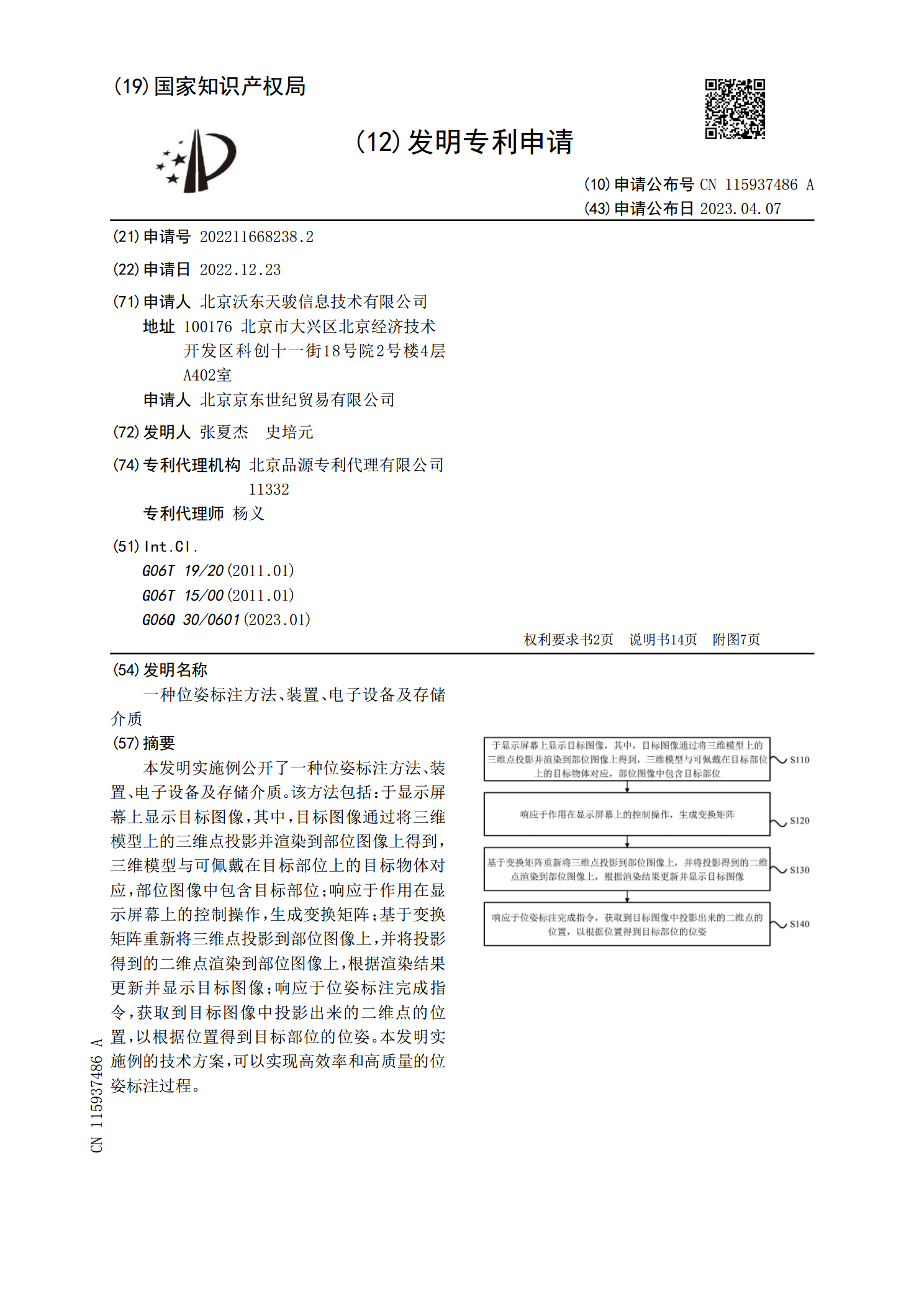
本发明实施例公开了一种位姿标注方法、装置、电子设备及存储介质。该方法包括:于显示屏幕上显示目标图像,其中,目标图像通过将三维模型上的三维点投影并渲染到部位图像上得到,三维模型与可佩戴在目标部位上的目标物体对应,部位图像中包含目标部位;响应于作用在显示屏幕上的控制操作,生成变换矩阵;基于变换矩阵重新将三维点投影到部位图像上,并将投影得到的二维点渲染到部位图像上,根据渲染结果更新并显示目标图像;响应于位姿标注完成指令,获取到目标图像中投影出来的二维点的位置,以根据位置得到目标部位的位姿。本发明实施例的技术方案