
室内导航的视觉定位方法及相关设备.pdf

猫巷****永安

1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

室内导航的视觉定位方法及相关设备.pdf
本公开的实施方式提供了室内导航的视觉定位方法及装置、计算机可读存储介质和电子设备,属于计算机和通信技术领域。所述方法包括:获取室内的查询图像;获取所述查询图像的特征点;获取所述查询图像的特征点的描述子;根据所述查询图像的描述子查询室内地图以获得所述查询图像的所述室内地图中的候选关键图像集合;将所述查询图像的每个特征点与所述候选关键图像集合中的每个关键图像中的特征点进行比较,并以最优和次优比例对所述查询图像的特征点进行筛除以获取筛除后的所述查询图像的特征点;根据筛除后的所述查询图像的特征点确定拍摄所述查询图
室内导航定位方法和相关装置.pdf
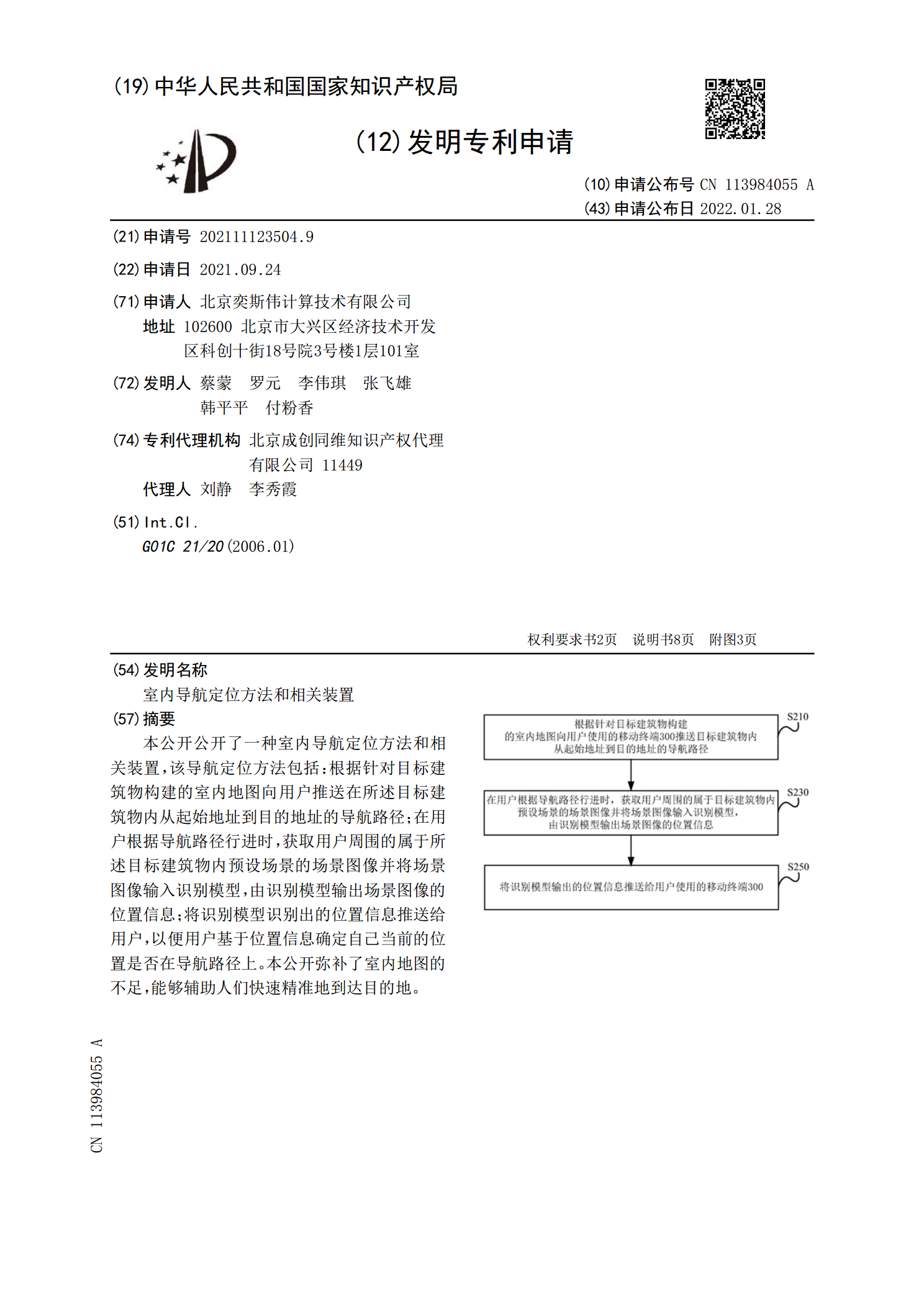
本公开公开了一种室内导航定位方法和相关装置,该导航定位方法包括:根据针对目标建筑物构建的室内地图向用户推送在所述目标建筑物内从起始地址到目的地址的导航路径;在用户根据导航路径行进时,获取用户周围的属于所述目标建筑物内预设场景的场景图像并将场景图像输入识别模型,由识别模型输出场景图像的位置信息;将识别模型识别出的位置信息推送给用户,以便用户基于位置信息确定自己当前的位置是否在导航路径上。本公开弥补了室内地图的不足,能够辅助人们快速精准地到达目的地。
超宽带与视觉融合的室内机器人定位与自主导航方法.pdf
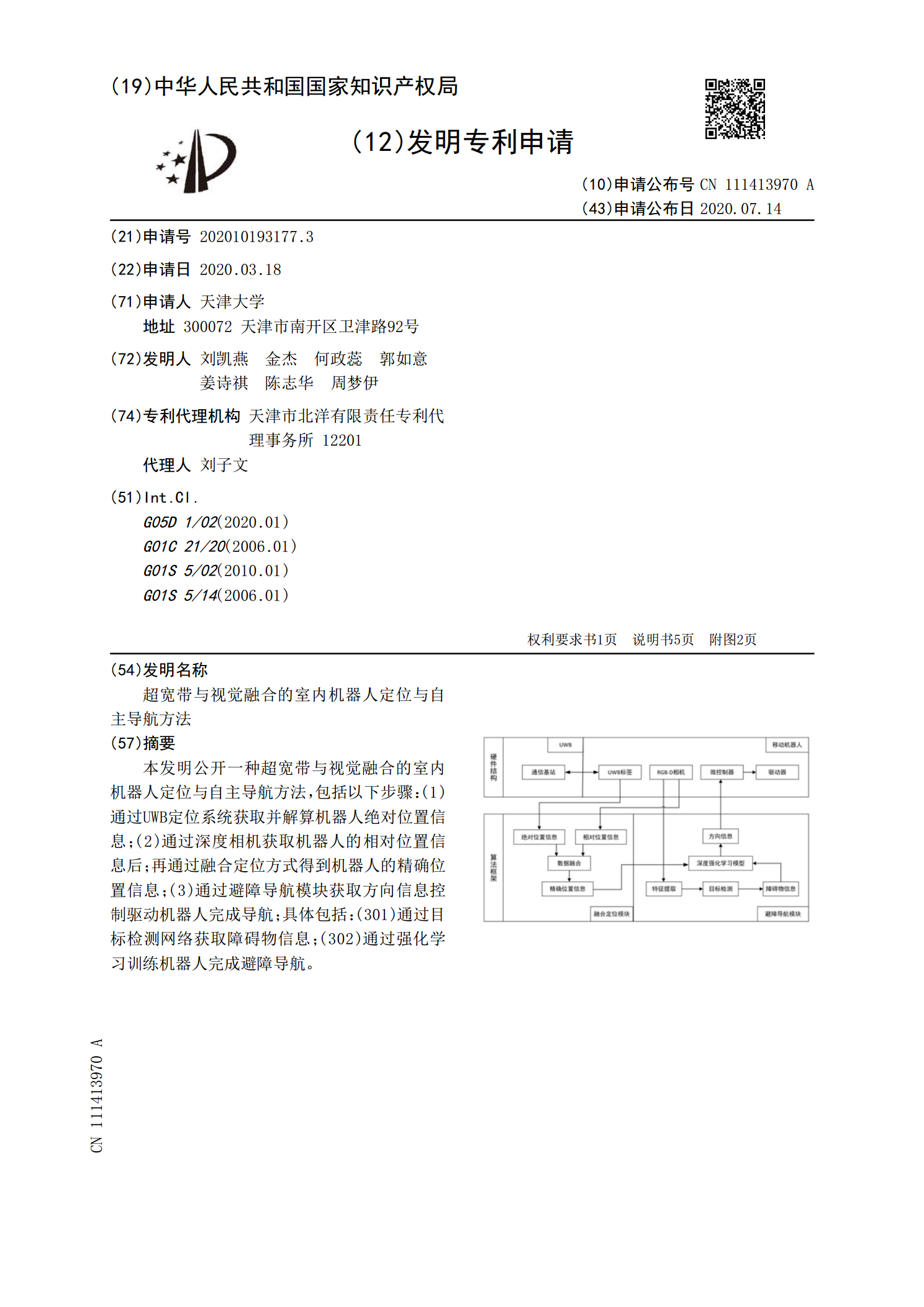
本发明公开一种超宽带与视觉融合的室内机器人定位与自主导航方法,包括以下步骤:(1)通过UWB定位系统获取并解算机器人绝对位置信息;(2)通过深度相机获取机器人的相对位置信息后;再通过融合定位方式得到机器人的精确位置信息;(3)通过避障导航模块获取方向信息控制驱动机器人完成导航;具体包括:(301)通过目标检测网络获取障碍物信息;(302)通过强化学习训练机器人完成避障导航。

一种基于视觉的机器人室内定位导航方法.pdf
本发明公开了一种基于视觉的机器人室内定位导航方法,属于视觉导航领域。该方法是根据二维码的思路,设计了一种简单方便、易于识别、内含绝对位置坐标且具有一定纠错能力的人工路标,将路标设置于天花板上,由安装在机器人上且光轴与天花板垂直的摄像机进行拍摄,再通过图像的阈值分割、连通域提取、轮廓曲线匹配以及路标特征识别一系列步骤定位路标,解析路标中所包含的坐标信息,最终通过机器人的位置估计算法获得机器人当前的绝对位置和航向角。本发明方法减少了遮挡及噪声干扰,大大降低了图像处理方法、时间以及周围环境的复杂度。
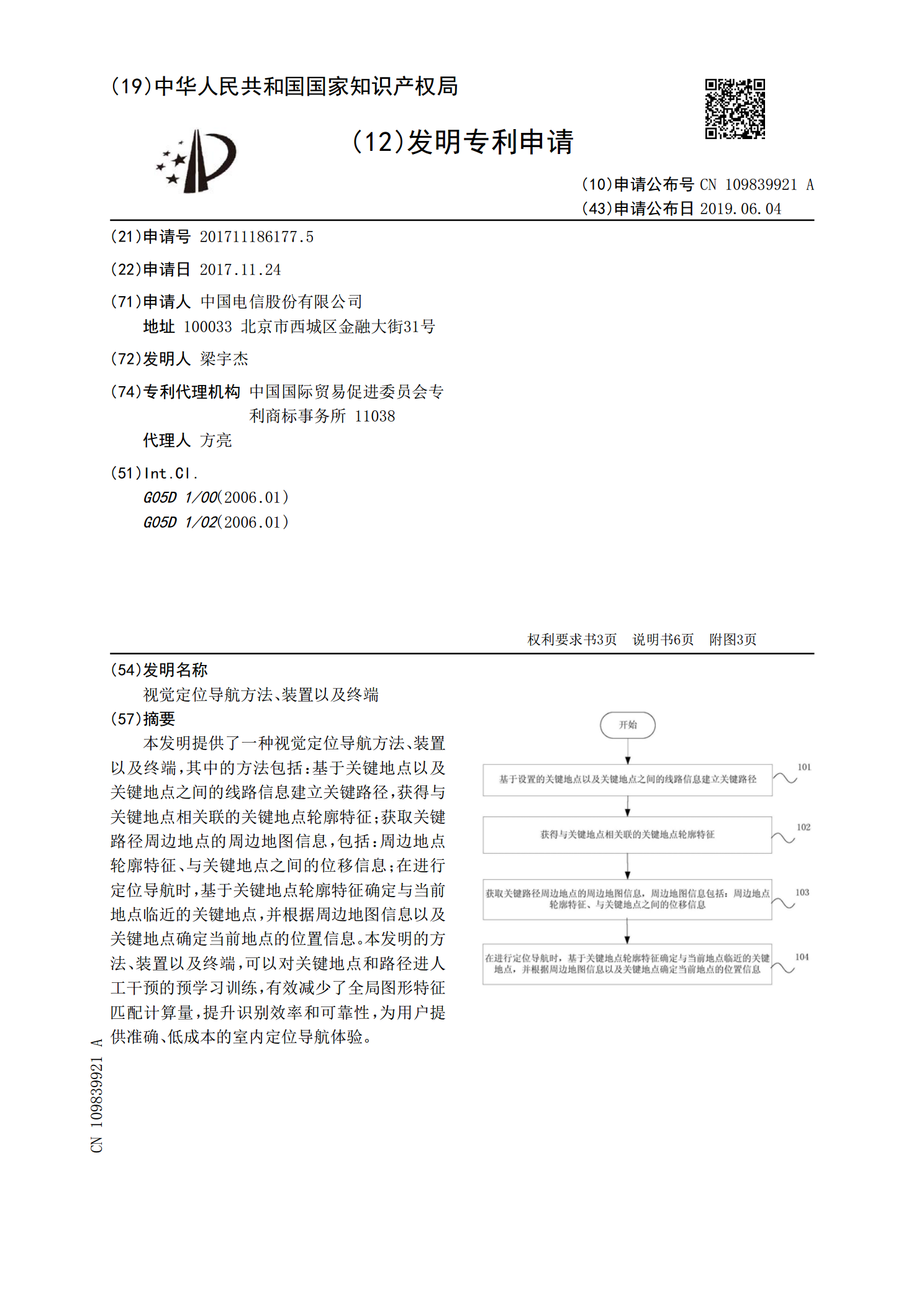
视觉定位导航方法、装置以及终端.pdf
本发明提供了一种视觉定位导航方法、装置以及终端,其中的方法包括:基于关键地点以及关键地点之间的线路信息建立关键路径,获得与关键地点相关联的关键地点轮廓特征;获取关键路径周边地点的周边地图信息,包括:周边地点轮廓特征、与关键地点之间的位移信息;在进行定位导航时,基于关键地点轮廓特征确定与当前地点临近的关键地点,并根据周边地图信息以及关键地点确定当前地点的位置信息。本发明的方法、装置以及终端,可以对关键地点和路径进人工干预的预学习训练,有效减少了全局图形特征匹配计算量,提升识别效率和可靠性,为用户提供准确、低