
超宽带与视觉融合的室内机器人定位与自主导航方法.pdf

是飞****文章

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
超宽带与视觉融合的室内机器人定位与自主导航方法.pdf
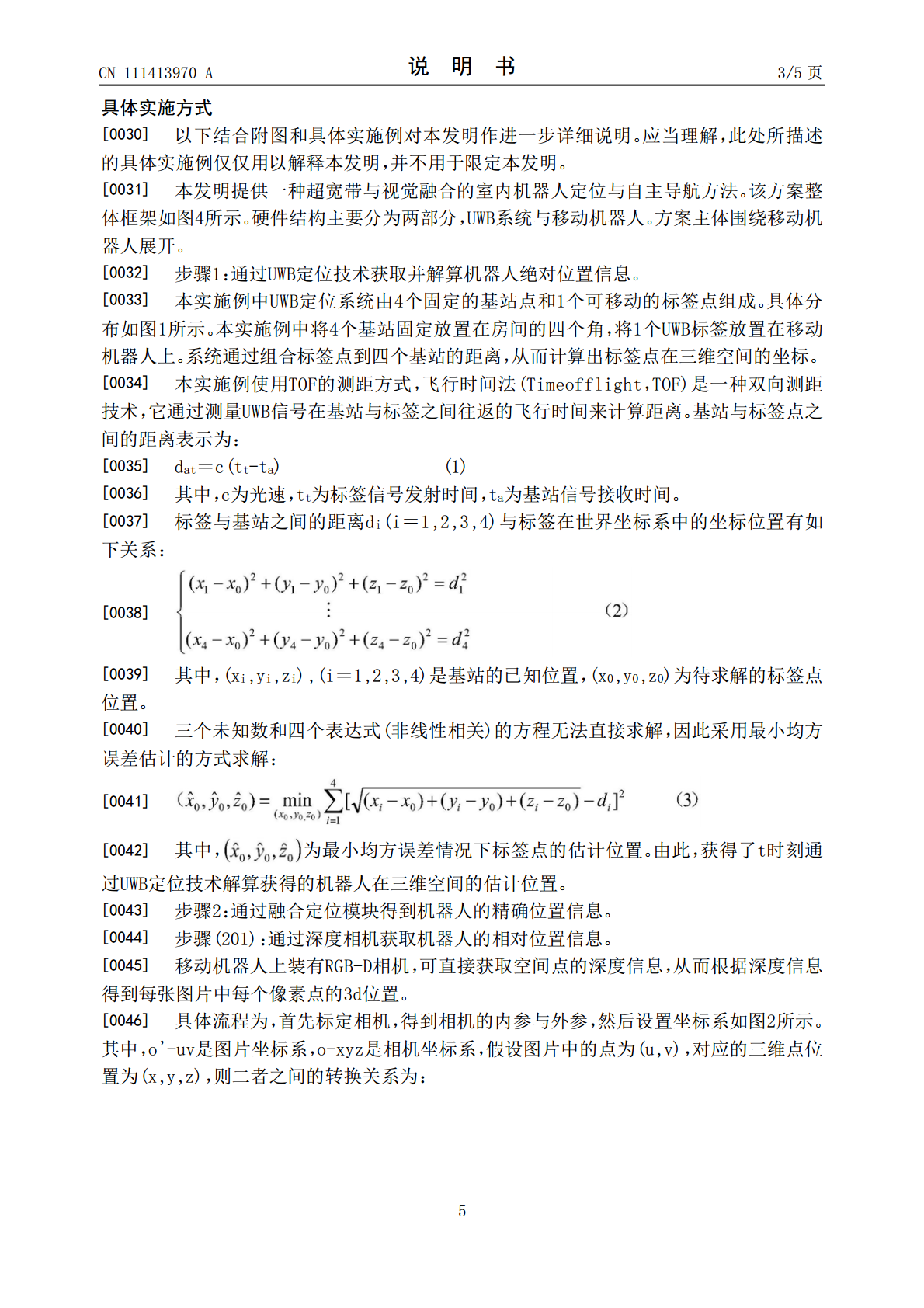
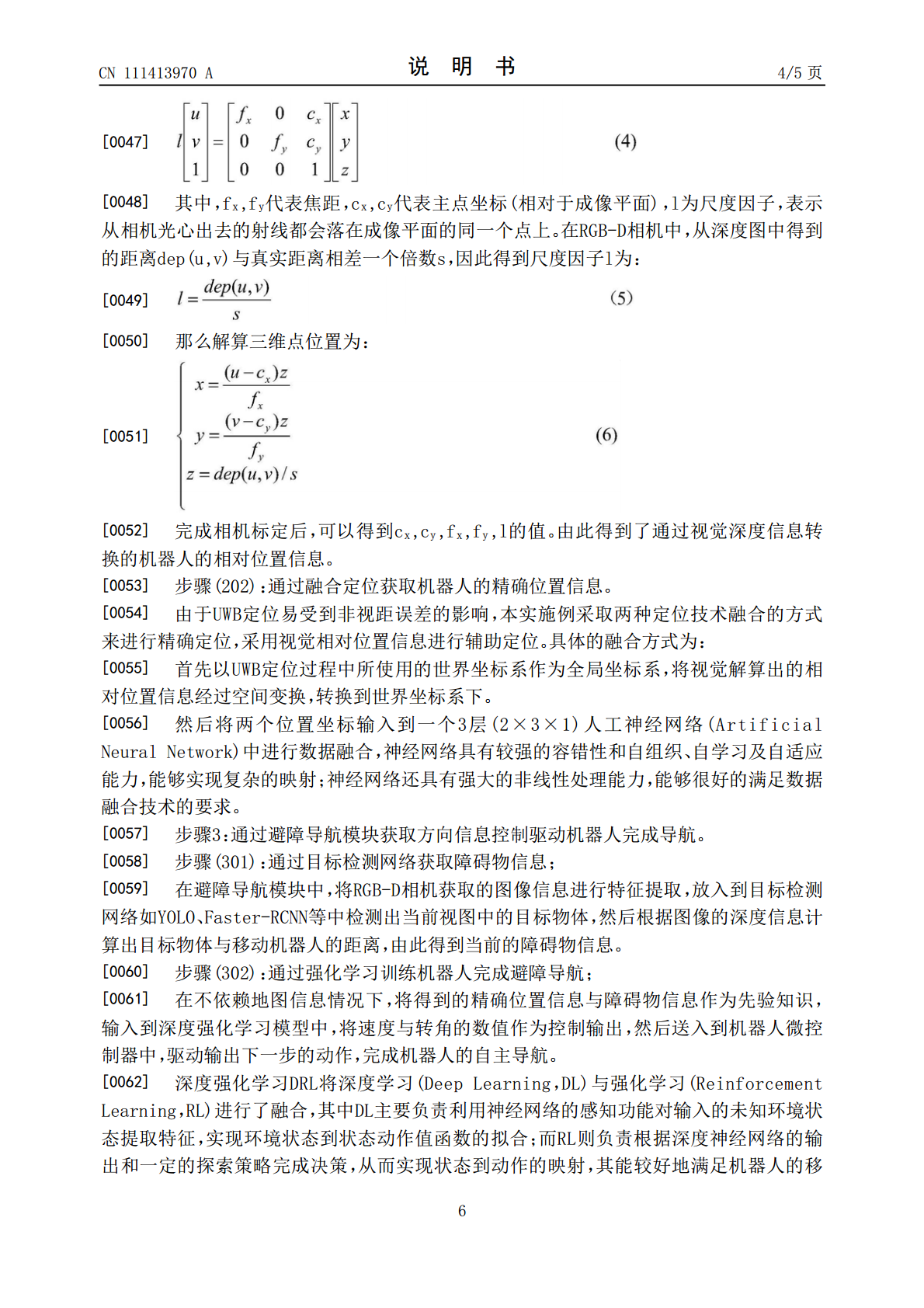
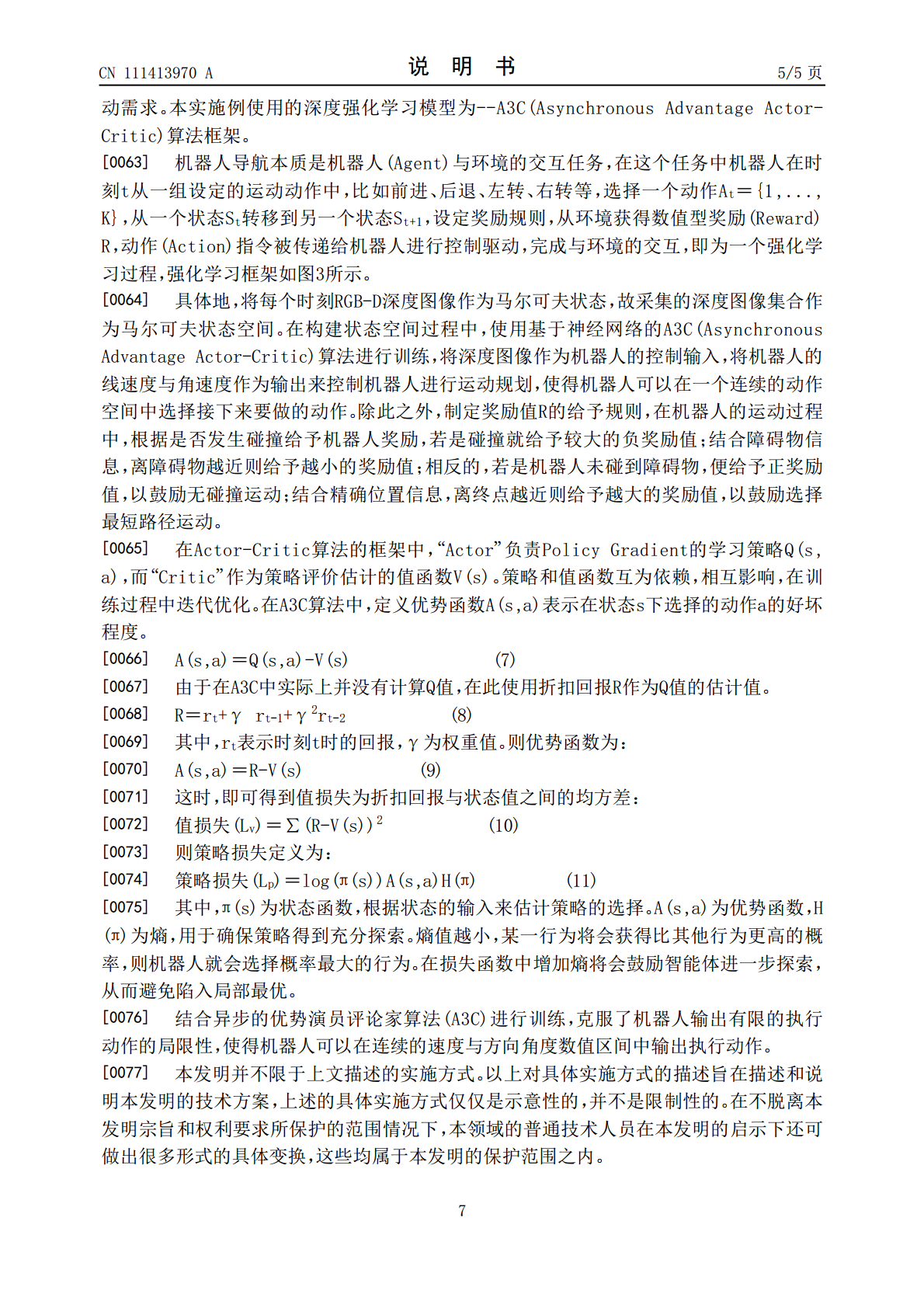
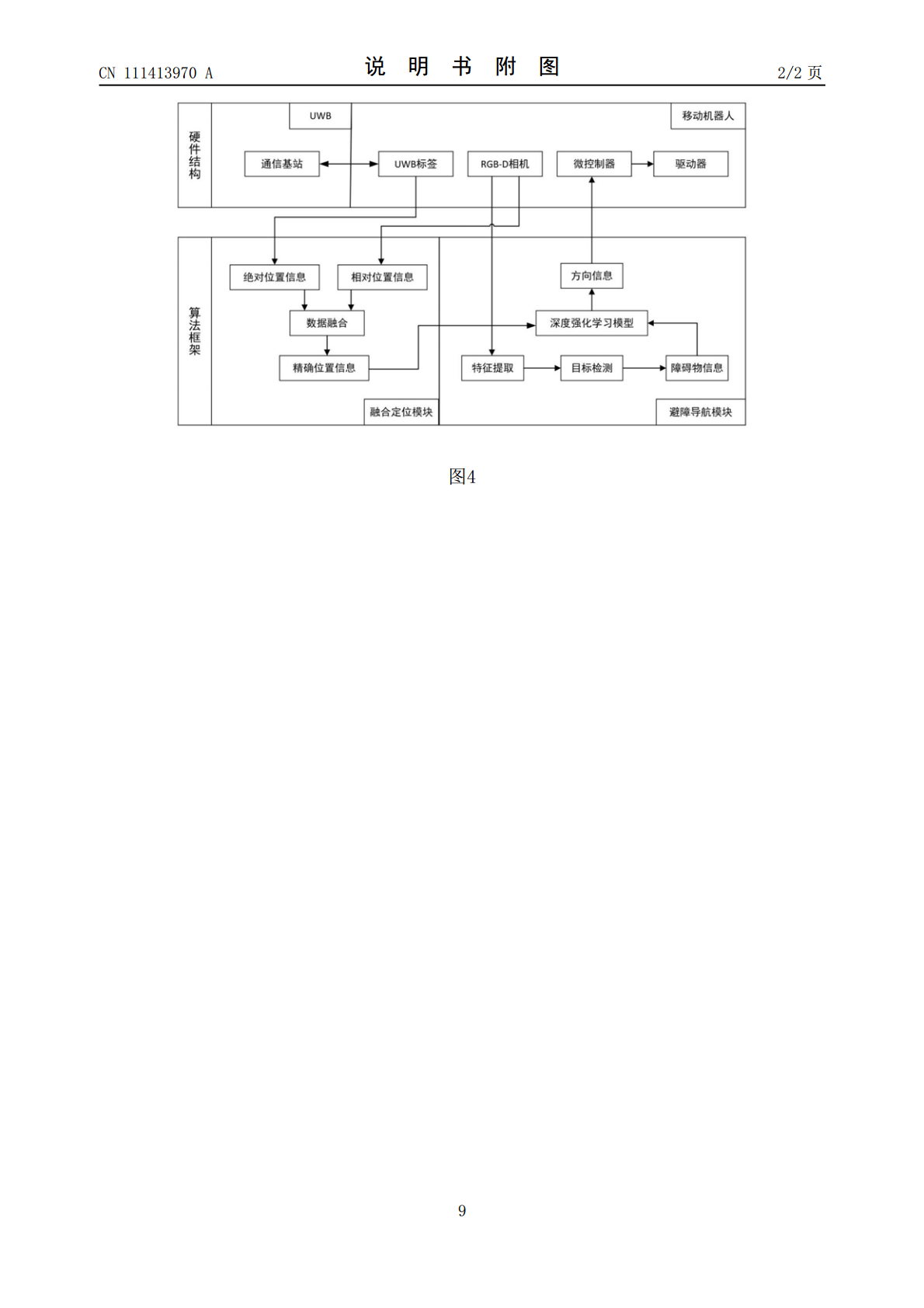
本发明公开一种超宽带与视觉融合的室内机器人定位与自主导航方法,包括以下步骤:(1)通过UWB定位系统获取并解算机器人绝对位置信息;(2)通过深度相机获取机器人的相对位置信息后;再通过融合定位方式得到机器人的精确位置信息;(3)通过避障导航模块获取方向信息控制驱动机器人完成导航;具体包括:(301)通过目标检测网络获取障碍物信息;(302)通过强化学习训练机器人完成避障导航。

电力机器人的自主导航与视觉辅助定位融合方法.docx
电力机器人的自主导航与视觉辅助定位融合方法标题:电力机器人的自主导航与视觉辅助定位融合方法摘要:随着电力工业的不断发展,电力机器人被广泛应用于电力巡检、维护和故障排除等工作中。电力机器人的自主导航和视觉辅助定位是实现高效、精确、安全操作的核心技术之一。本文针对电力机器人的自主导航和视觉辅助定位问题,提出了一种融合方法,通过对机器人感知、定位和导航能力的提升,实现了对电力设施的精准定位和自主导航。关键词:电力机器人,自主导航,视觉辅助定位,融合方法1.引言电力机器人作为电力工业的重要装备之一,能够在高温、高

融合视觉与惯性导航的机器人自主定位的任务书.docx
融合视觉与惯性导航的机器人自主定位的任务书任务书:融合视觉与惯性导航的机器人自主定位背景在机器人的使用场景中,自主定位是一个至关重要的问题。机器人需要知道自己在什么地方,并在其活动范围内自由移动。传统的机器人定位方法包括GPS定位、激光扫描仪定位等,这些方法在某些特定的场景下能够提供准确的定位结果。但是,在室内和复杂环境下,这些方法往往无法提供有效的解决方案。因此,融合视觉与惯性导航成为自主定位的一种主要方法。任务描述本任务要求实现一种基于融合视觉与惯性导航的机器人自主定位算法,能够实现在室内环境下的定位

室内导航的视觉定位方法及相关设备.pdf
本公开的实施方式提供了室内导航的视觉定位方法及装置、计算机可读存储介质和电子设备,属于计算机和通信技术领域。所述方法包括:获取室内的查询图像;获取所述查询图像的特征点;获取所述查询图像的特征点的描述子;根据所述查询图像的描述子查询室内地图以获得所述查询图像的所述室内地图中的候选关键图像集合;将所述查询图像的每个特征点与所述候选关键图像集合中的每个关键图像中的特征点进行比较,并以最优和次优比例对所述查询图像的特征点进行筛除以获取筛除后的所述查询图像的特征点;根据筛除后的所述查询图像的特征点确定拍摄所述查询图

一种基于视觉的机器人室内定位导航方法.pdf
本发明公开了一种基于视觉的机器人室内定位导航方法,属于视觉导航领域。该方法是根据二维码的思路,设计了一种简单方便、易于识别、内含绝对位置坐标且具有一定纠错能力的人工路标,将路标设置于天花板上,由安装在机器人上且光轴与天花板垂直的摄像机进行拍摄,再通过图像的阈值分割、连通域提取、轮廓曲线匹配以及路标特征识别一系列步骤定位路标,解析路标中所包含的坐标信息,最终通过机器人的位置估计算法获得机器人当前的绝对位置和航向角。本发明方法减少了遮挡及噪声干扰,大大降低了图像处理方法、时间以及周围环境的复杂度。