
多无人车协同载运系统轨迹跟踪控制方法、系统及介质.pdf

一吃****春艳

1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人车协同载运系统轨迹跟踪控制方法、系统及介质.pdf
本发明公开了一种多无人车协同载运系统轨迹跟踪控制方法、系统及介质,本发明方法包括针对多无人车协同载运系统中的引导无人车、负载和跟随无人车三个子系统,分别建立三个子系统的无约束动力学模型;建立约束方程,通过对时间求导转化为二阶形式,再引入零阶形式和一阶形式的轨迹误差的约束方程,建立矩阵形式的系统总约束方程;将系统总约束方程嵌入到无约束动力学模型中,得到多无人车协同载运系统整个系统的约束动力学模型,对约束动力学模型求解得到引导无人车和跟随无人车的控制力矩以实现多无人车协同载运系统的轨迹跟踪。本发明旨在克服现有
多UAV协同轨迹规划方法及系统、设备、存储介质.pdf
本发明公开了一种多UAV协同轨迹规划方法及系统、设备、存储介质,所述多UAV协同轨迹规划方法先建立协同轨迹优化的约束模型和目标函数,将协同轨迹规划问题描述为参数最优化问题,然后,结合飞行器性能模型,采用B样条曲线参数化表示UAV轨迹,最后采用进化方法对参数最优化问题进行求解,得到满足空间协同要求和时间协同要求的协同轨迹,实现了多UAV轨迹间的时空协同。
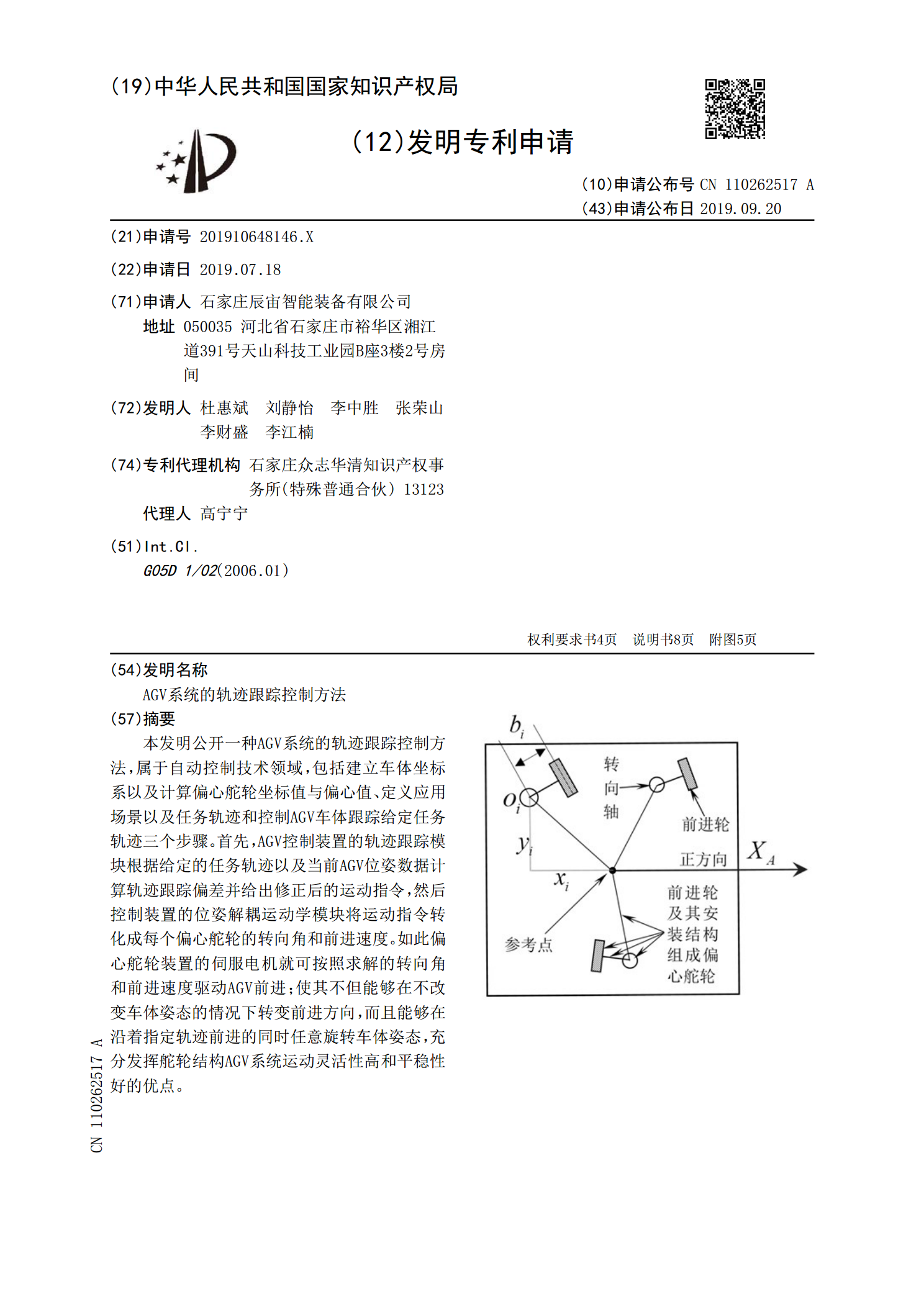
AGV系统的轨迹跟踪控制方法.pdf
本发明公开一种AGV系统的轨迹跟踪控制方法,属于自动控制技术领域,包括建立车体坐标系以及计算偏心舵轮坐标值与偏心值、定义应用场景以及任务轨迹和控制AGV车体跟踪给定任务轨迹三个步骤。首先,AGV控制装置的轨迹跟踪模块根据给定的任务轨迹以及当前AGV位姿数据计算轨迹跟踪偏差并给出修正后的运动指令,然后控制装置的位姿解耦运动学模块将运动指令转化成每个偏心舵轮的转向角和前进速度。如此偏心舵轮装置的伺服电机就可按照求解的转向角和前进速度驱动AGV前进;使其不但能够在不改变车体姿态的情况下转变前进方向,而且能够在沿
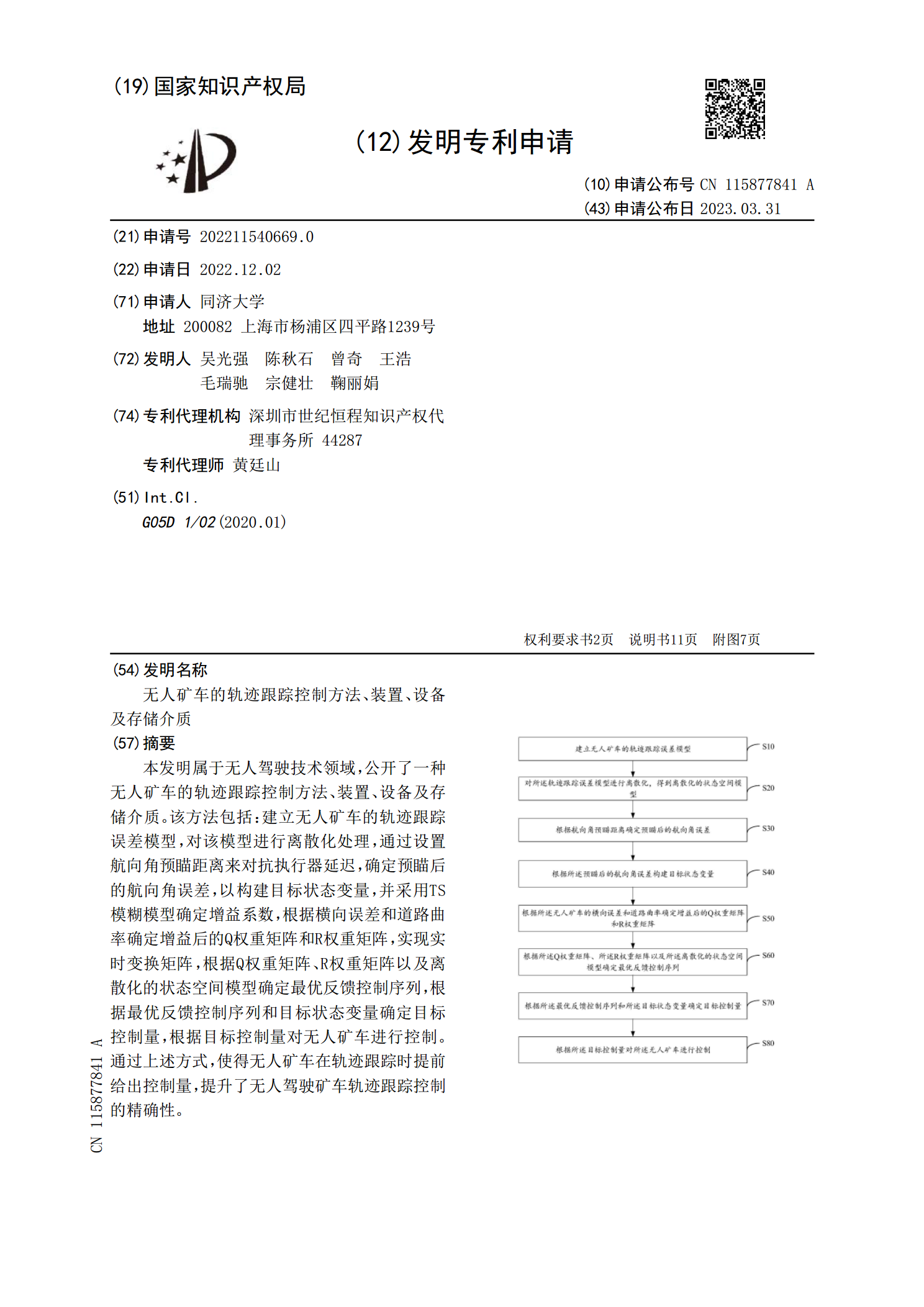
无人矿车的轨迹跟踪控制方法、装置、设备及存储介质.pdf
本发明属于无人驾驶技术领域,公开了一种无人矿车的轨迹跟踪控制方法、装置、设备及存储介质。该方法包括:建立无人矿车的轨迹跟踪误差模型,对该模型进行离散化处理,通过设置航向角预瞄距离来对抗执行器延迟,确定预瞄后的航向角误差,以构建目标状态变量,并采用TS模糊模型确定增益系数,根据横向误差和道路曲率确定增益后的Q权重矩阵和R权重矩阵,实现实时变换矩阵,根据Q权重矩阵、R权重矩阵以及离散化的状态空间模型确定最优反馈控制序列,根据最优反馈控制序列和目标状态变量确定目标控制量,根据目标控制量对无人矿车进行控制。通过上
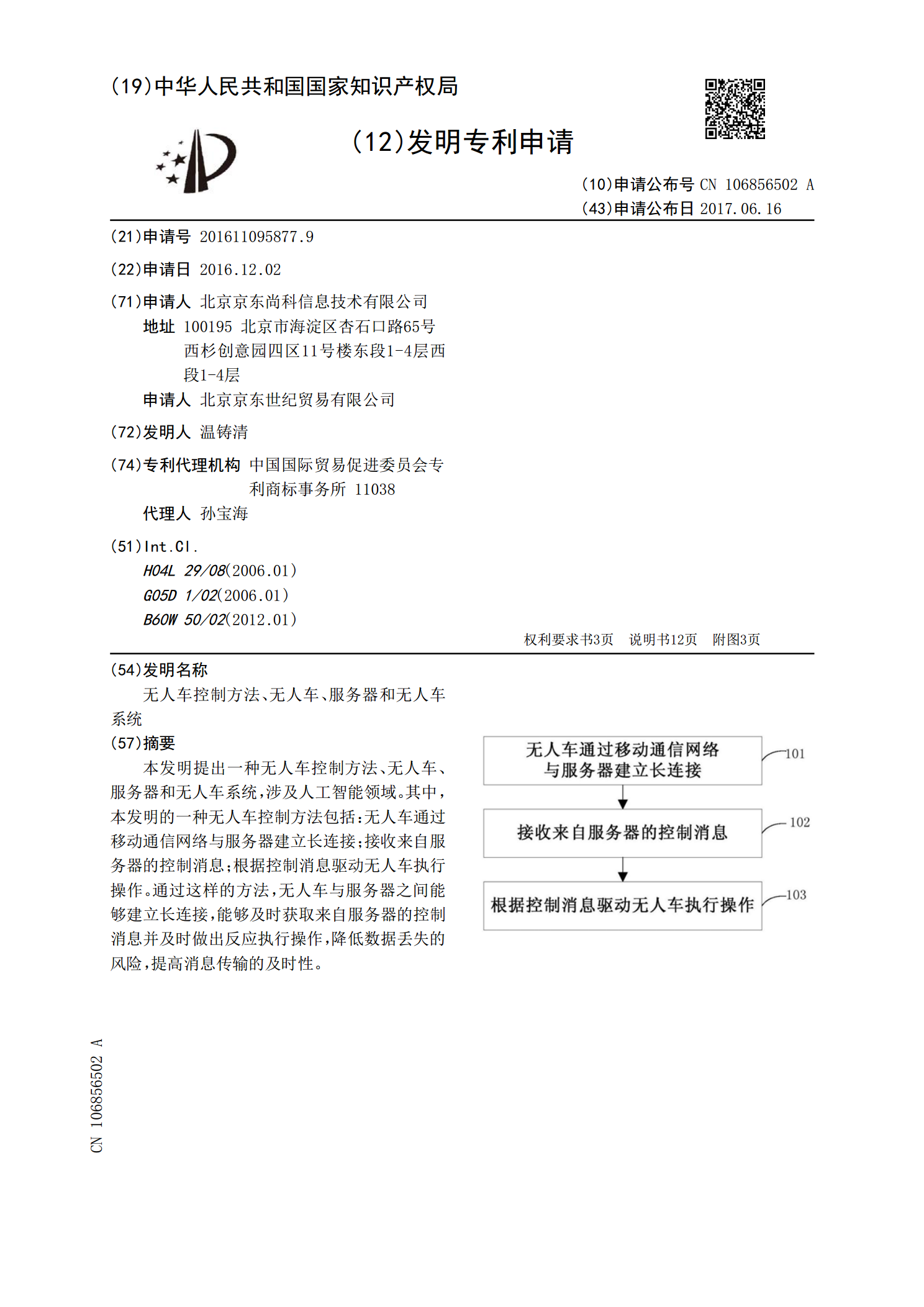
无人车控制方法、无人车、服务器和无人车系统.pdf
本发明提出一种无人车控制方法、无人车、服务器和无人车系统,涉及人工智能领域。其中,本发明的一种无人车控制方法包括:无人车通过移动通信网络与服务器建立长连接;接收来自服务器的控制消息;根据控制消息驱动无人车执行操作。通过这样的方法,无人车与服务器之间能够建立长连接,能够及时获取来自服务器的控制消息并及时做出反应执行操作,降低数据丢失的风险,提高消息传输的及时性。