
一种应用于雷达与AIS航迹关联的特征融合方法.pdf

涵蓄****09

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种应用于雷达与AIS航迹关联的特征融合方法.pdf
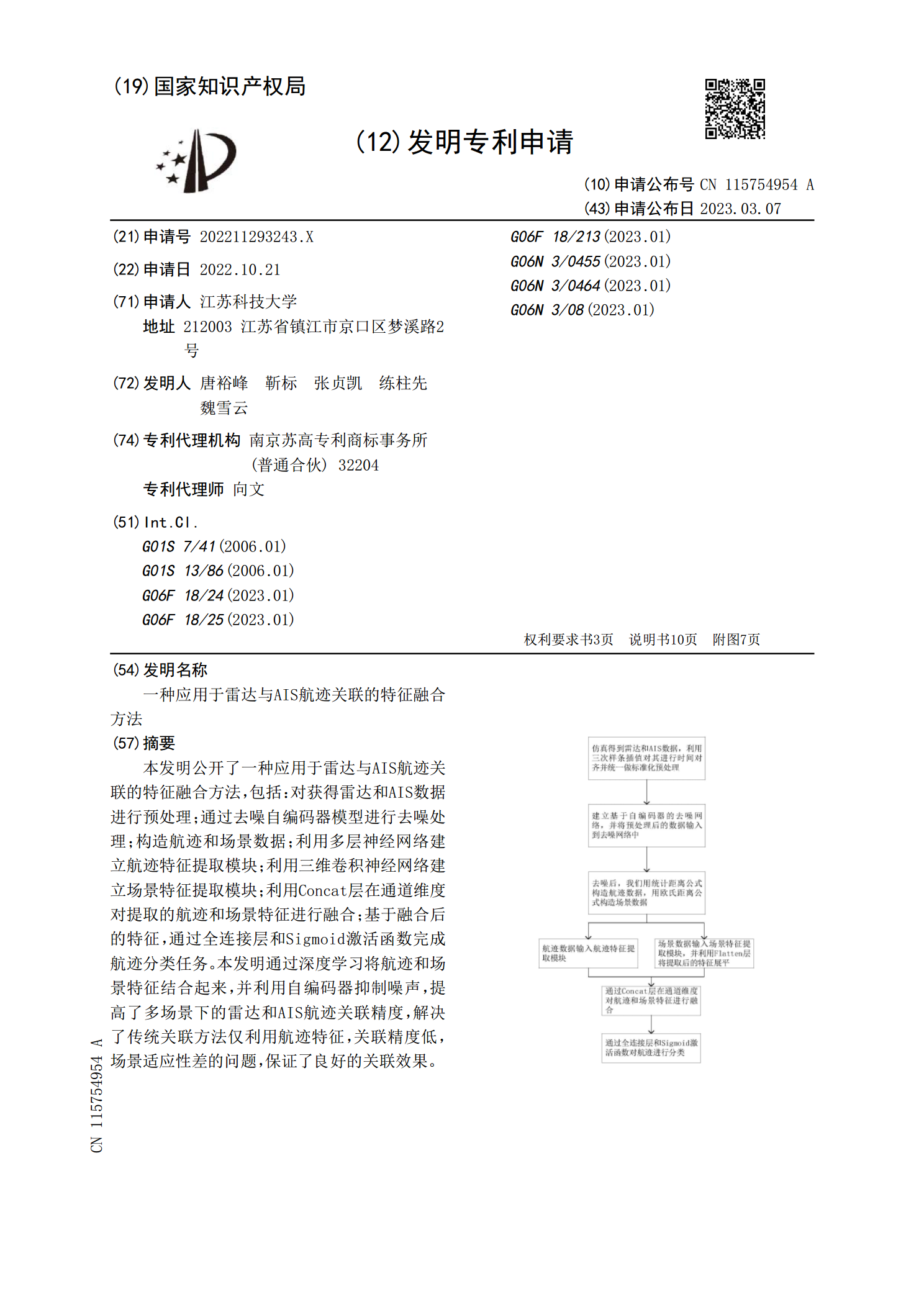
本发明公开了一种应用于雷达与AIS航迹关联的特征融合方法,包括:对获得雷达和AIS数据进行预处理;通过去噪自编码器模型进行去噪处理;构造航迹和场景数据;利用多层神经网络建立航迹特征提取模块;利用三维卷积神经网络建立场景特征提取模块;利用Concat层在通道维度对提取的航迹和场景特征进行融合;基于融合后的特征,通过全连接层和Sigmoid激活函数完成航迹分类任务。本发明通过深度学习将航迹和场景特征结合起来,并利用自编码器抑制噪声,提高了多场景下的雷达和AIS航迹关联精度,解决了传统关联方法仅利用航迹特征,关

一种融合雷达与AIS的船舶精确关联方法.pdf
本发明公开了一种融合雷达与AIS的船舶精确关联方法,利用雷达以及AIS获取船舶信息,并考虑到距离、方位、航速、航向、船首向、加速度等因素对船舶关联的影响,通过建立多因素模糊集模型,计算出双传感器船舶目标航迹的匹配度,在复杂多目标的场景下实现了船舶准确、稳定、可靠的关联。该方法首先将双传感器获取到船舶数据进行时空转换统一;然后建立多因素模糊集,进行一次船舶数据关联并找出合理关联点迹;最后,通过二次关联求出最佳关联点迹。本发明所提出的方法与传统融合雷达与AIS的关联方法相比,考虑到六个影响因素,不仅有着准确度

一种机载相控阵雷达航迹关联方法.pdf
本发明公开了一种机载相控阵雷达航迹关联方法,属于雷达航迹跟踪技术领域,包括以下步骤:S1:关联步骤划分;S2:径向速度门限判断;S3:门限交叉判断;S4:航迹续接。本发明通过提高航迹关联的可靠性和实时性,提升了机载相控阵雷达的航迹跟踪质量,尤其是在平台运动、跟踪目标数量多、环境杂波强的情况下;在多种坐标系下进行关联门限交叉判断,即利用目标运动特性进行门限判断,又避免了雷达量测方位与量测距离误差的耦合,同时不损失多普勒精度;当目标失跟时,对失跟航迹与新起始航迹进行航迹续接,既快速锁定失跟目标,又降低了短航迹
基于机载雷达主被动监视的航迹融合方法.pdf
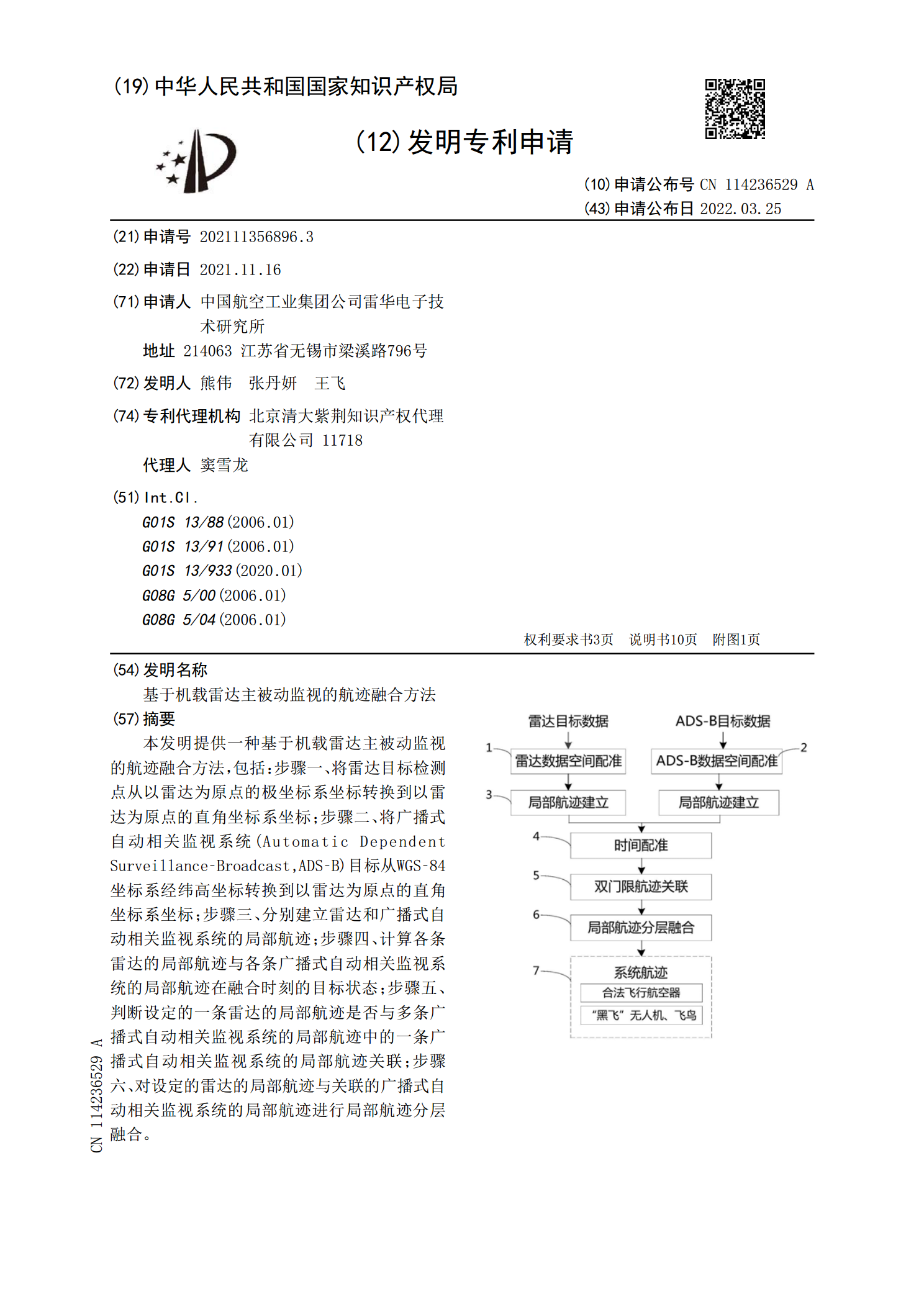
本发明提供一种基于机载雷达主被动监视的航迹融合方法,包括:步骤一、将雷达目标检测点从以雷达为原点的极坐标系坐标转换到以雷达为原点的直角坐标系坐标;步骤二、将广播式自动相关监视系统(AutomaticDependentSurveillance‑Broadcast,ADS‑B)目标从WGS‑84坐标系经纬高坐标转换到以雷达为原点的直角坐标系坐标;步骤三、分别建立雷达和广播式自动相关监视系统的局部航迹;步骤四、计算各条雷达的局部航迹与各条广播式自动相关监视系统的局部航迹在融合时刻的目标状态;步骤五、判断设定
标记关联的多声呐多目标航迹融合方法.pptx
,目录PartOnePartTwo定义和背景目的和意义关联方法分类关联方法优缺点PartThree声呐系统介绍多声呐数据融合算法目标航迹关联算法融合效果评估PartFour标记定义和作用关联算法流程算法实现细节算法性能评估PartFive实验环境和数据集实验过程和结果结果分析和比较结论和建议PartSix应用领域和实例未来发展方向和挑战相关技术发展对关联方法的影响未来研究重点和展望THANKS