
一种融合雷达与AIS的船舶精确关联方法.pdf

梦影****主a


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种融合雷达与AIS的船舶精确关联方法.pdf
本发明公开了一种融合雷达与AIS的船舶精确关联方法,利用雷达以及AIS获取船舶信息,并考虑到距离、方位、航速、航向、船首向、加速度等因素对船舶关联的影响,通过建立多因素模糊集模型,计算出双传感器船舶目标航迹的匹配度,在复杂多目标的场景下实现了船舶准确、稳定、可靠的关联。该方法首先将双传感器获取到船舶数据进行时空转换统一;然后建立多因素模糊集,进行一次船舶数据关联并找出合理关联点迹;最后,通过二次关联求出最佳关联点迹。本发明所提出的方法与传统融合雷达与AIS的关联方法相比,考虑到六个影响因素,不仅有着准确度
一种应用于雷达与AIS航迹关联的特征融合方法.pdf
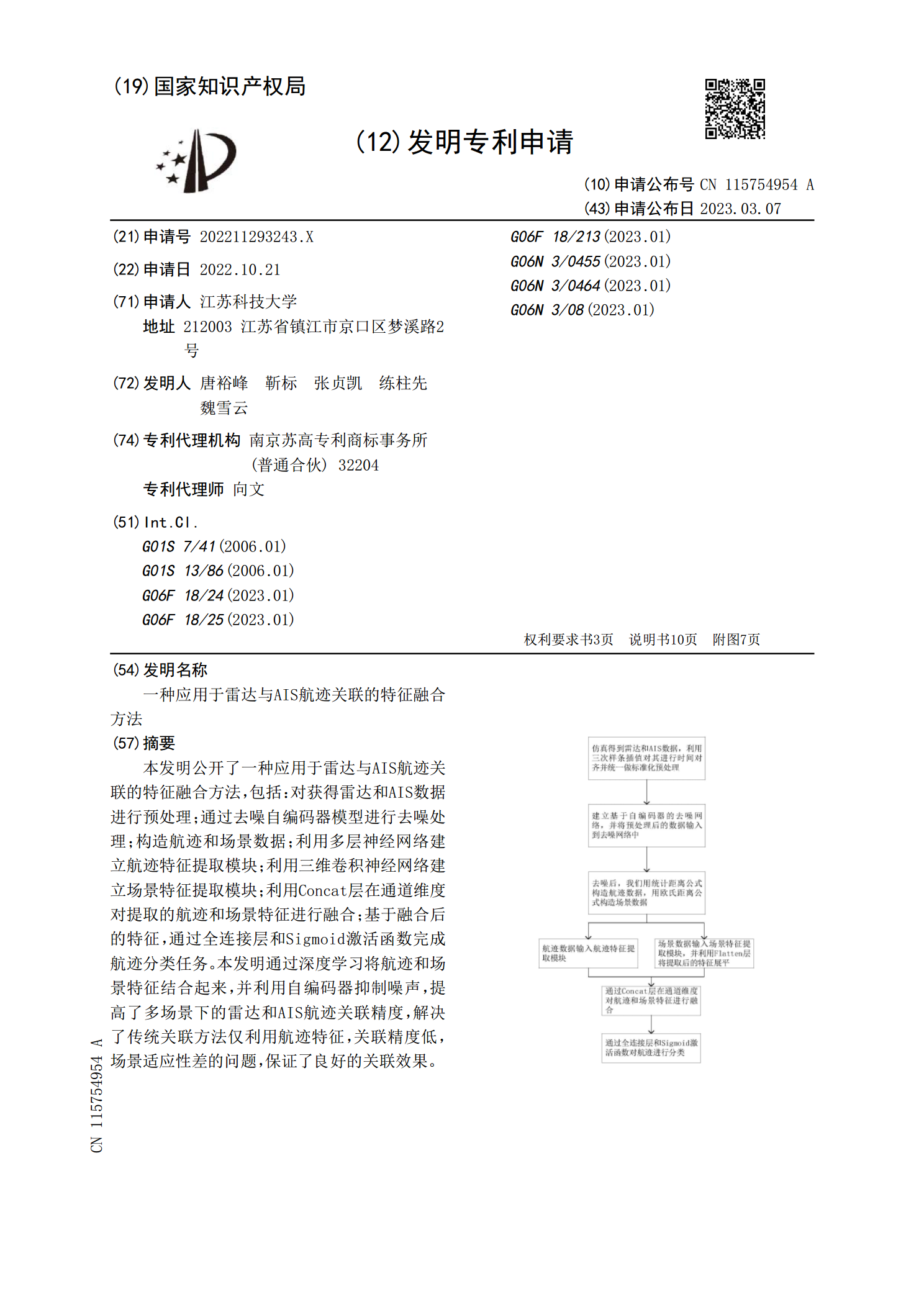
本发明公开了一种应用于雷达与AIS航迹关联的特征融合方法,包括:对获得雷达和AIS数据进行预处理;通过去噪自编码器模型进行去噪处理;构造航迹和场景数据;利用多层神经网络建立航迹特征提取模块;利用三维卷积神经网络建立场景特征提取模块;利用Concat层在通道维度对提取的航迹和场景特征进行融合;基于融合后的特征,通过全连接层和Sigmoid激活函数完成航迹分类任务。本发明通过深度学习将航迹和场景特征结合起来,并利用自编码器抑制噪声,提高了多场景下的雷达和AIS航迹关联精度,解决了传统关联方法仅利用航迹特征,关
一种基于超视距雷达与AIS的海上船舶监控方法.pdf
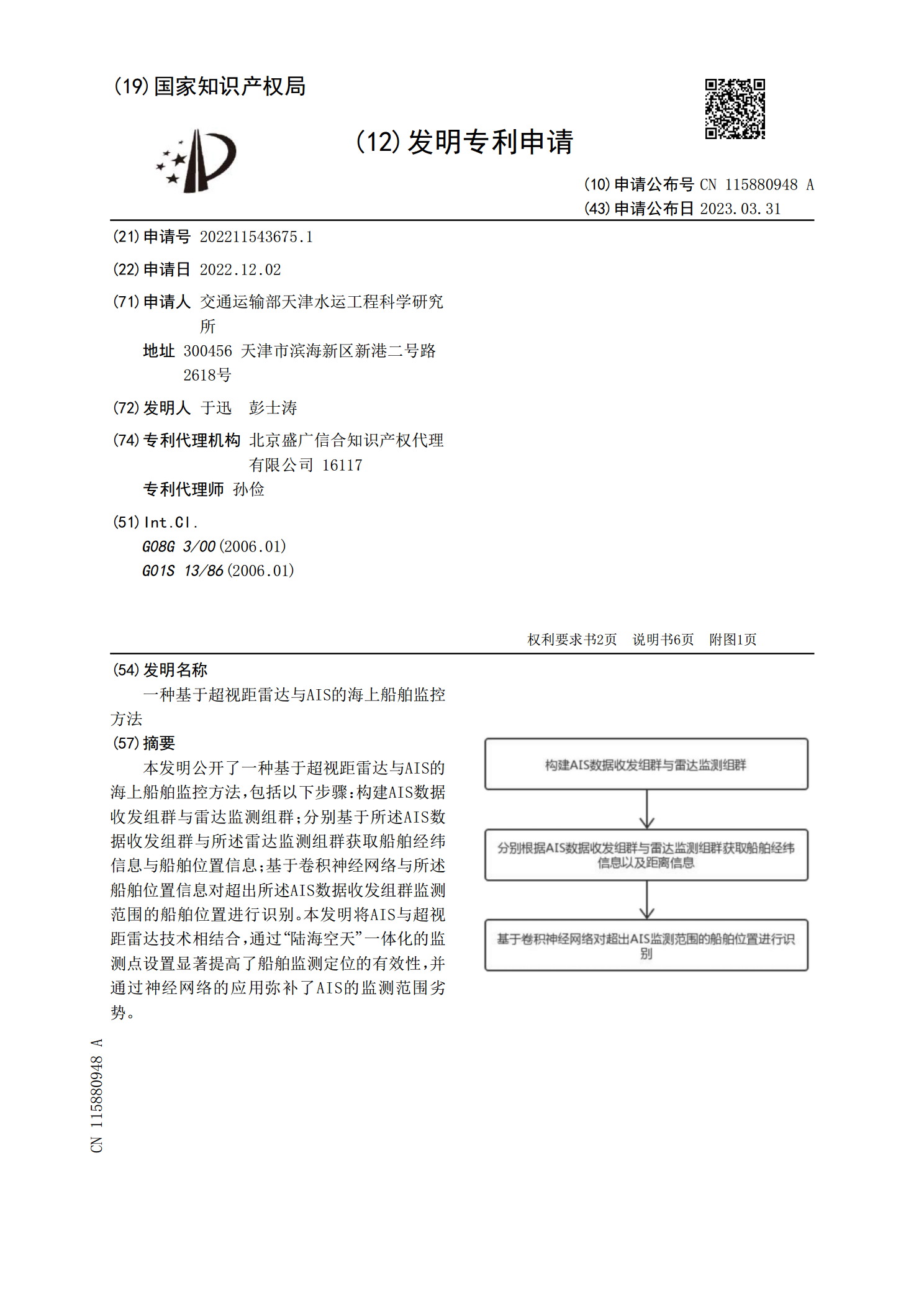
本发明公开了一种基于超视距雷达与AIS的海上船舶监控方法,包括以下步骤:构建AIS数据收发组群与雷达监测组群;分别基于所述AIS数据收发组群与所述雷达监测组群获取船舶经纬信息与船舶位置信息;基于卷积神经网络与所述船舶位置信息对超出所述AIS数据收发组群监测范围的船舶位置进行识别。本发明将AIS与超视距雷达技术相结合,通过“陆海空天”一体化的监测点设置显著提高了船舶监测定位的有效性,并通过神经网络的应用弥补了AIS的监测范围劣势。

一种基于雷达和AIS数据的船舶异常行为判定的方法.pdf
本发明提供的一种基于雷达和AIS数据的船舶异常行为判定的方法,通过分别获取雷达数据和AIS数据,并通过模糊评价矩阵进行时空配准,得到融合后的数据;根据融合后的数据对船舶的行为进行监测,综合考虑雷达和AIS数据之间良好的互补性和冗余性,通过数据融合处理能够弥补各自存在的不足之外,雷达与AIS的集成同时可以提高导航系统的检测性能和精度可靠性,提供更加精准的导航数据,结合模糊集合论的方法来判断雷达检测到的船舶是否存在异常行为,有效的提高了目标的检测性能和精度可靠性。

一种融合AIS技术的船舶尾气数据分析方法及测量系统.pdf
一种融合AIS技术的船舶尾气数据分析方法及测量系统,本发明提出一种融合AIS技术的船舶尾气数据分析方法及测量系统,气体检测装置,其用于检测船舶原油燃烧产生的气体在空气中的含量,所述包括:固定点检测设备及移动式检测设备;船舶自动识别系统,其用于识别船舶运行轨迹信息;大数据分析中心,其用于将信息综合分析后得出船舶尾气硫含量是否超标;船舶尾气排放监管指挥信息发放平台,其用于接收大数据分析中心的最终数据及控制显示整个系统的运行。本发明的一种融合AIS技术的船舶尾气数据分析方法及测量系统,目的在于,为污染溯源、环保