
一种轮式机器人的定位方法和装置.pdf

慧颖****23


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮式机器人的定位方法和装置.pdf
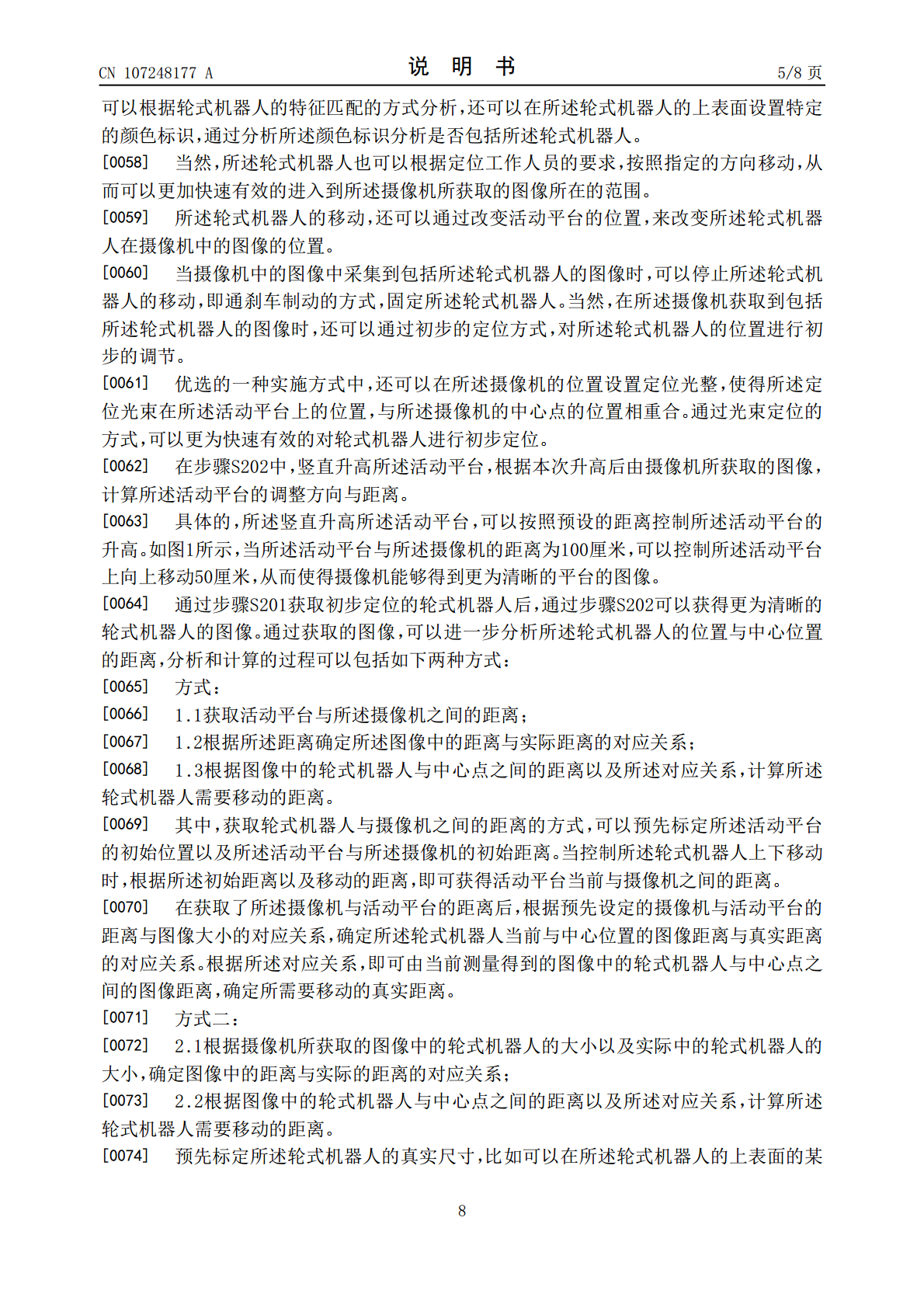
一种轮式机器人的定位方法包括:控制轮式机器人在测试用的活动平台上移动,当固定于所述平台上方的摄像机获取到包括所述轮式机器人的图像时,固定所述轮式机器人;竖直升高所述活动平台,根据本次升高后由摄像机所获取的图像,计算所述活动平台的调整方向与距离;根据所述调整的方向与距离,控制所述活动平台在水平方向移动。通过初步调整轮式机器人的位置,再通过活动平台的上下调整,使得摄像机能够获取更为精确的图像,由活动平台实现在水平方向上更为精确的调整,有利于提高轮式机器人的定位精度。
一种轮式机器人定位方法和轮式机器人.pdf
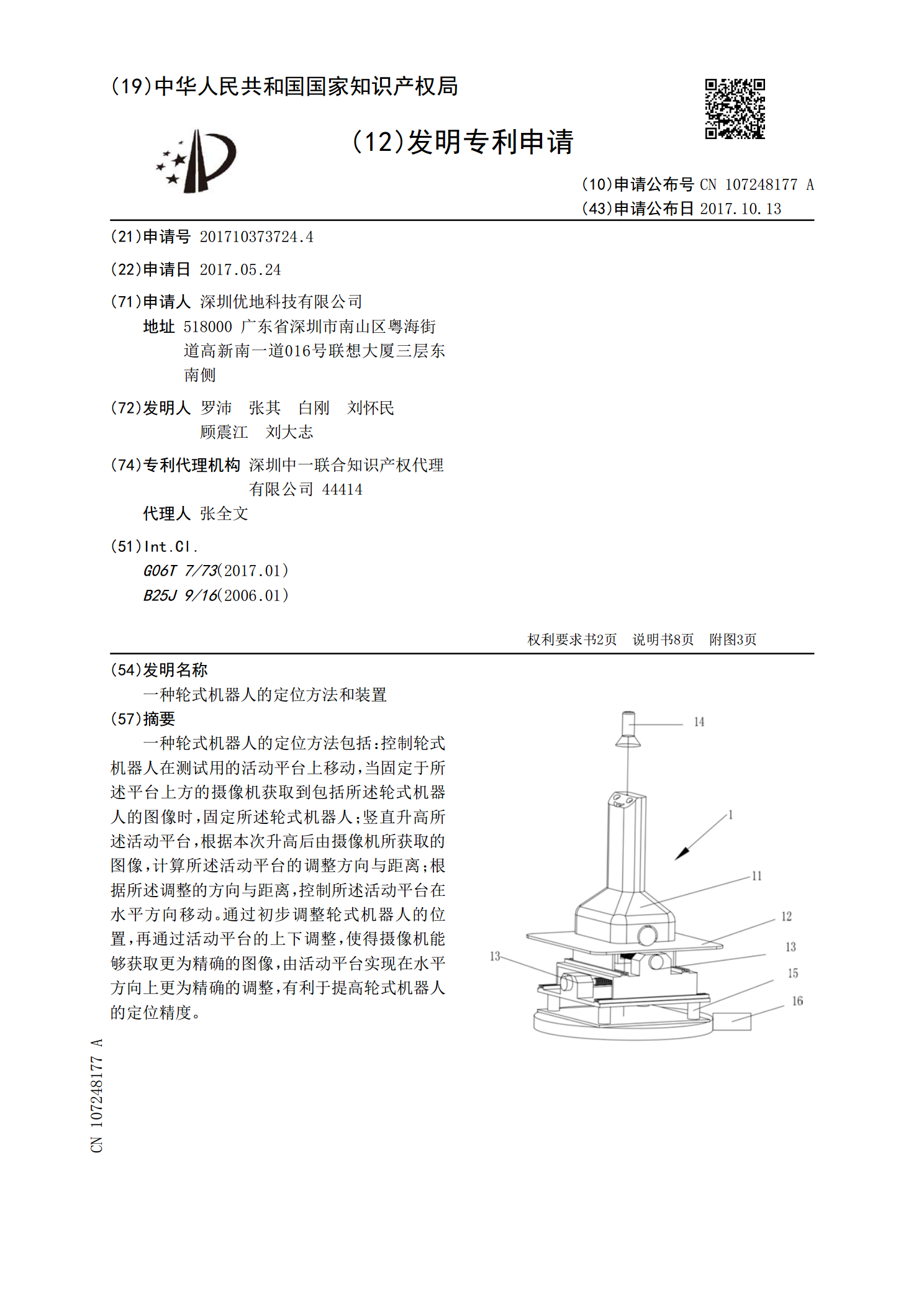
本发明提供了一种轮式机器人定位方法和轮式机器人,其方法包括:获取得到二维码标签在世界坐标系下的第一坐标;获取设于轮式机器人上的摄像头在轮式机器人坐标系下的第二坐标;通过摄像头扫描拍摄设置于地面上的二维码标签;当摄像头扫描到完整的二维码标签时,获取摄像头在二维码坐标系下的第三坐标;根据第一坐标和第三坐标,计算得到摄像头在世界坐标系下的第四坐标;根据第二坐标和第四坐标,计算得到轮式机器人在世界坐标系下的第五坐标;确定第五坐标为轮式机器人的空间位置。本发明实现轮式机器人对自身所在位置进行准确的定位,同时对环境的

一种基于IMU的轮式机器人定位方法.pdf
本发明提供了一种基于IMU的轮式机器人定位方法,属于机器人定位领域。其特征在于,通过在正常的SLAM算法中,建立一个包含N个姿态值att的滑动窗口,存储包含N个IMU数据、运动学参数滑动窗口用于回溯,使用IMU做纯惯性导航的方法来解决机器人“绑架”问题,即在发生碰撞、打滑等情况时把位置、姿态的更新算法切换到IMU的纯惯性导航算法上。本发明所述的方法解决了在一些窄视角、短距离测距模块应用中无法识别远距离物体、而近距场景在“绑架”时扫描匹配的结果也不是很准确、里程计和激光测距模块都无法使用的问题,而且该算法计

一种轮式机器人的误差调校方法和装置.pdf
一种轮式机器人的误差调校方法包括:通过往返测试的方式,获取轮式机器人往返的实际距离、在拐点顺时针拐弯时的往返路线的第一夹角,以及在拐点逆时针拐弯时的往返路线的第二夹角;根据述述往返的实际距离与轮式机器人的理论距离值,获得理想平均轮径与实际轮径之间的偏差的调校参数;根据所述第一偏差角,以及第一偏差角与第二偏差角之和,确定理论轮距与实际轮距的调校参数,根据所述第三偏差角、所述往返的实际距离以及实际轴距离,确定左右轮直径不等调校参数。该方法通过往返测试的方式,占用测试场地小,可以简单方便的对轮式机器人的各个调校

一种基于无线和红外定位的轮式机器人自动充电的方法.pdf
本发明公开了一种基于无线和红外定位的轮式机器人自动充电的方法,在墙上设有信标,在靠近信标的地面上设有充电桩,机器人身上不同位置设有ZigBee,左右两侧各设有红外传感器,机器人通过无线ZigBee判断信标方位,再通过红外传感器控制机器人平行于墙壁行走,直至机器人底部电源电极与充电桩上的弹片接触上,实现充电。本发明定位精准、复用性高、耗能低、控制简单、成本低。