
一种大视场中搜索和跟踪低小慢目标的探测系统及方法.pdf

是立****92

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种大视场中搜索和跟踪低小慢目标的探测系统及方法.pdf
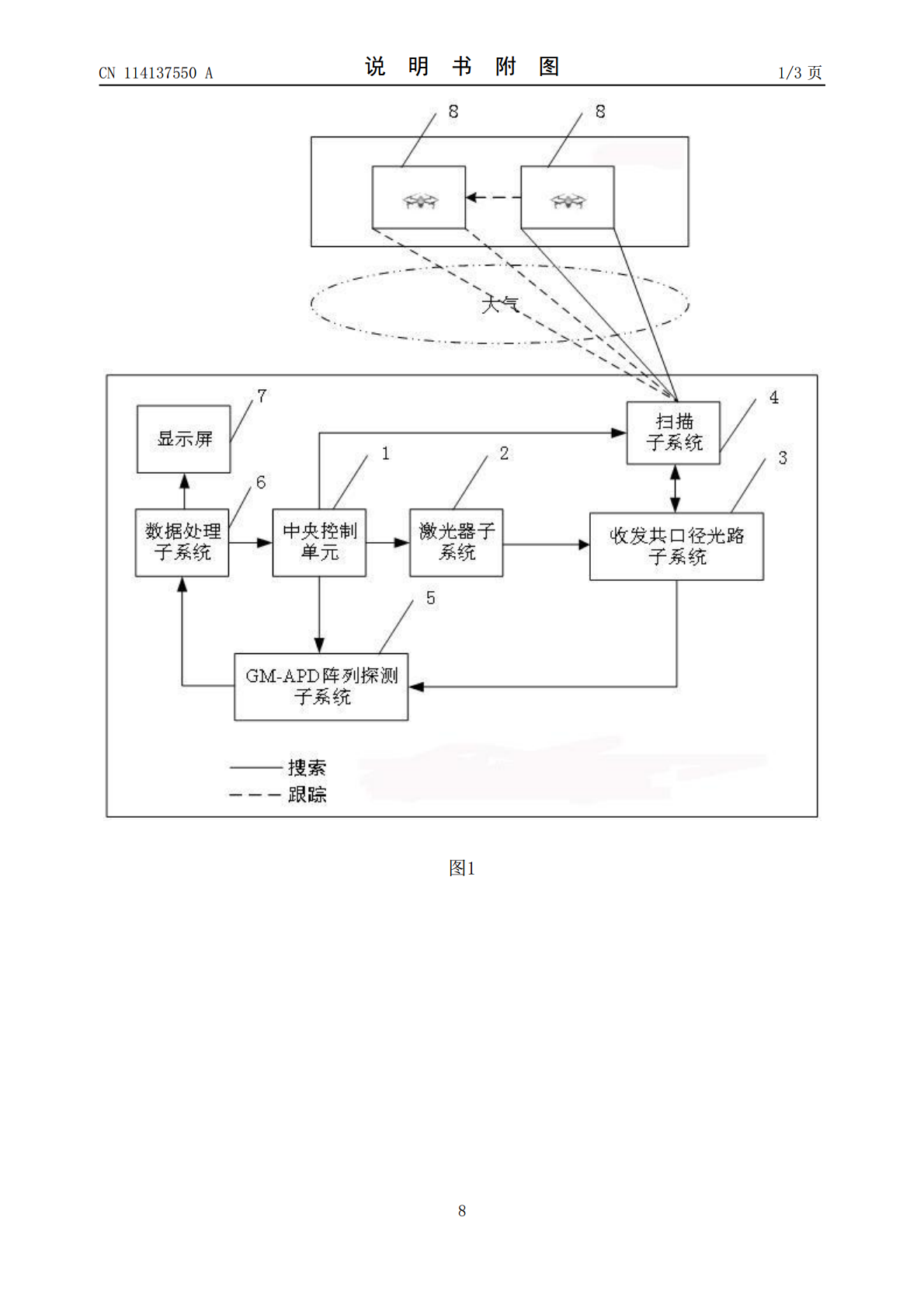
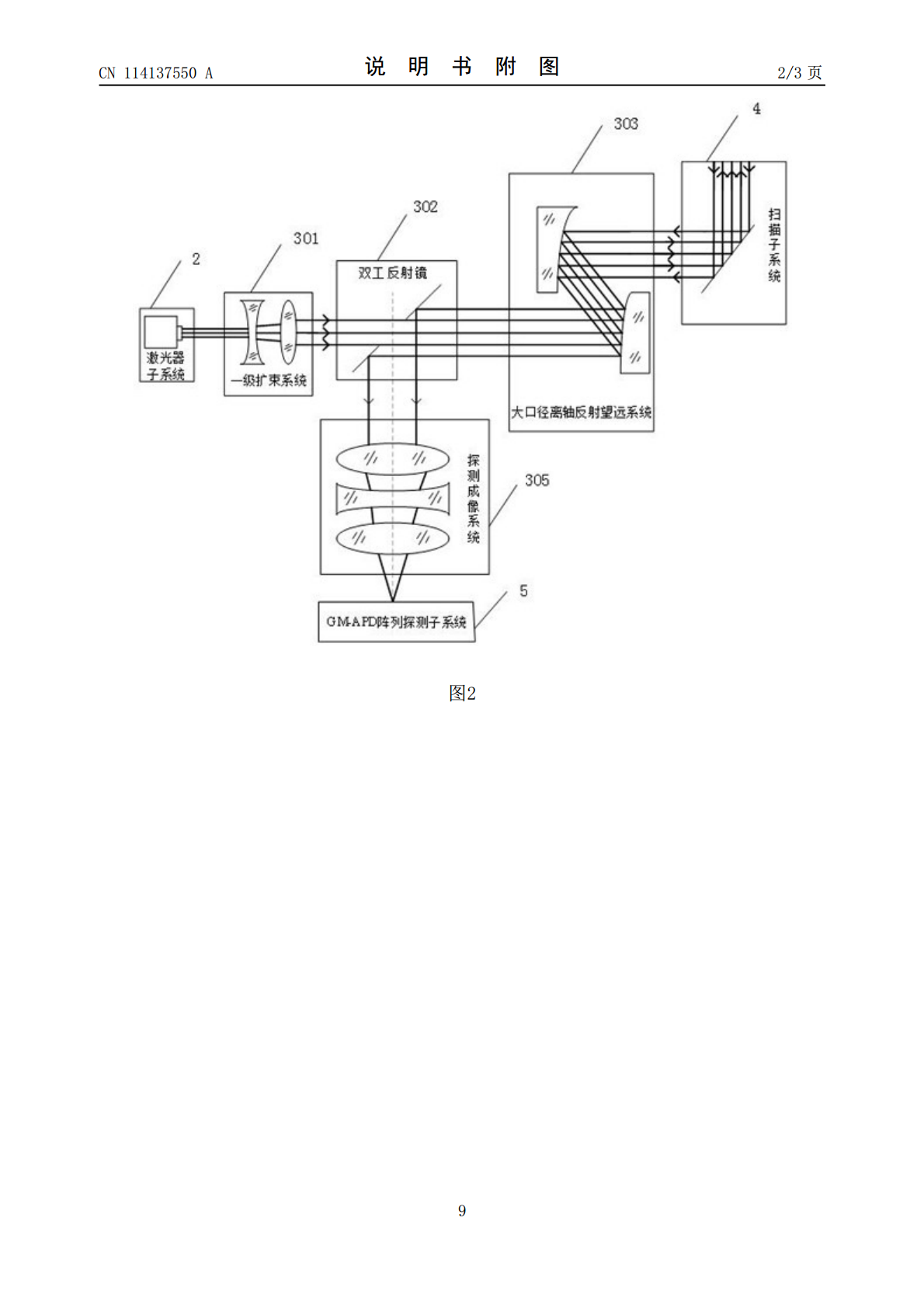
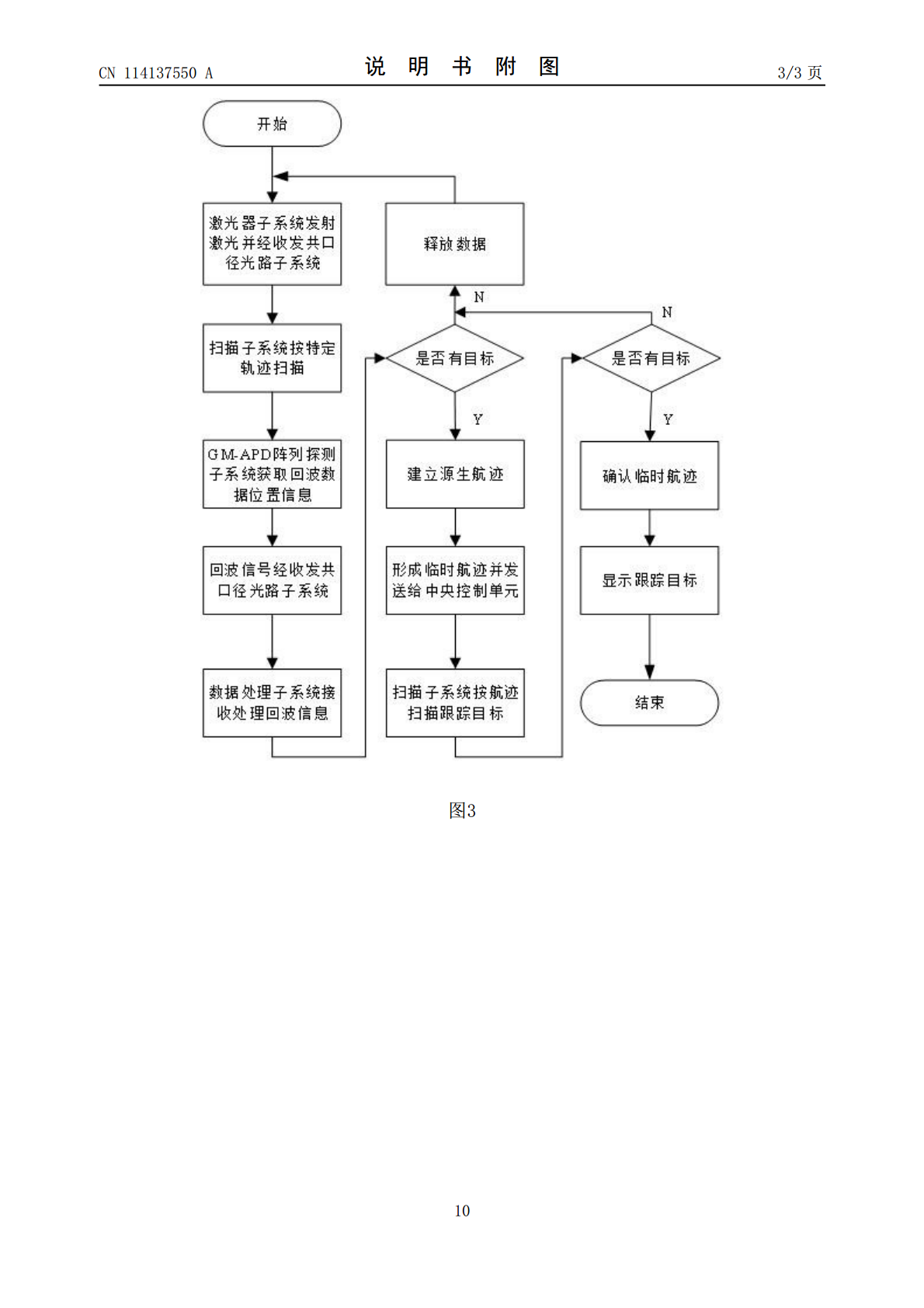
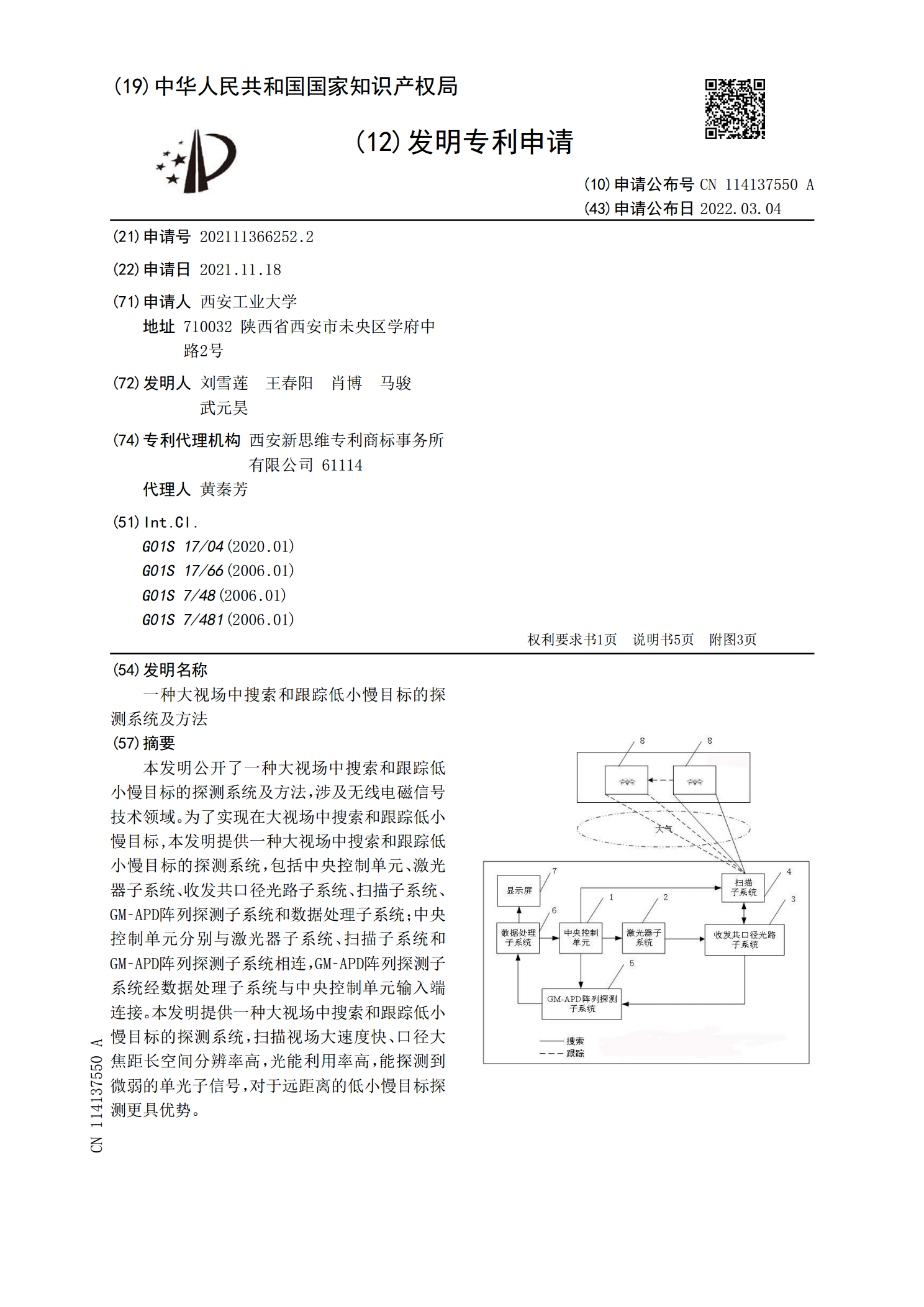
本发明公开了一种大视场中搜索和跟踪低小慢目标的探测系统及方法,涉及无线电磁信号技术领域。为了实现在大视场中搜索和跟踪低小慢目标,本发明提供一种大视场中搜索和跟踪低小慢目标的探测系统,包括中央控制单元、激光器子系统、收发共口径光路子系统、扫描子系统、GM‑APD阵列探测子系统和数据处理子系统;中央控制单元分别与激光器子系统、扫描子系统和GM‑APD阵列探测子系统相连,GM‑APD阵列探测子系统经数据处理子系统与中央控制单元输入端连接。本发明提供一种大视场中搜索和跟踪低小慢目标的探测系统,扫描视场大速度快、口
低慢小目标大视场探测光学系统设计.pdf
低慢小目标大视场探测光学系统设计.pdf
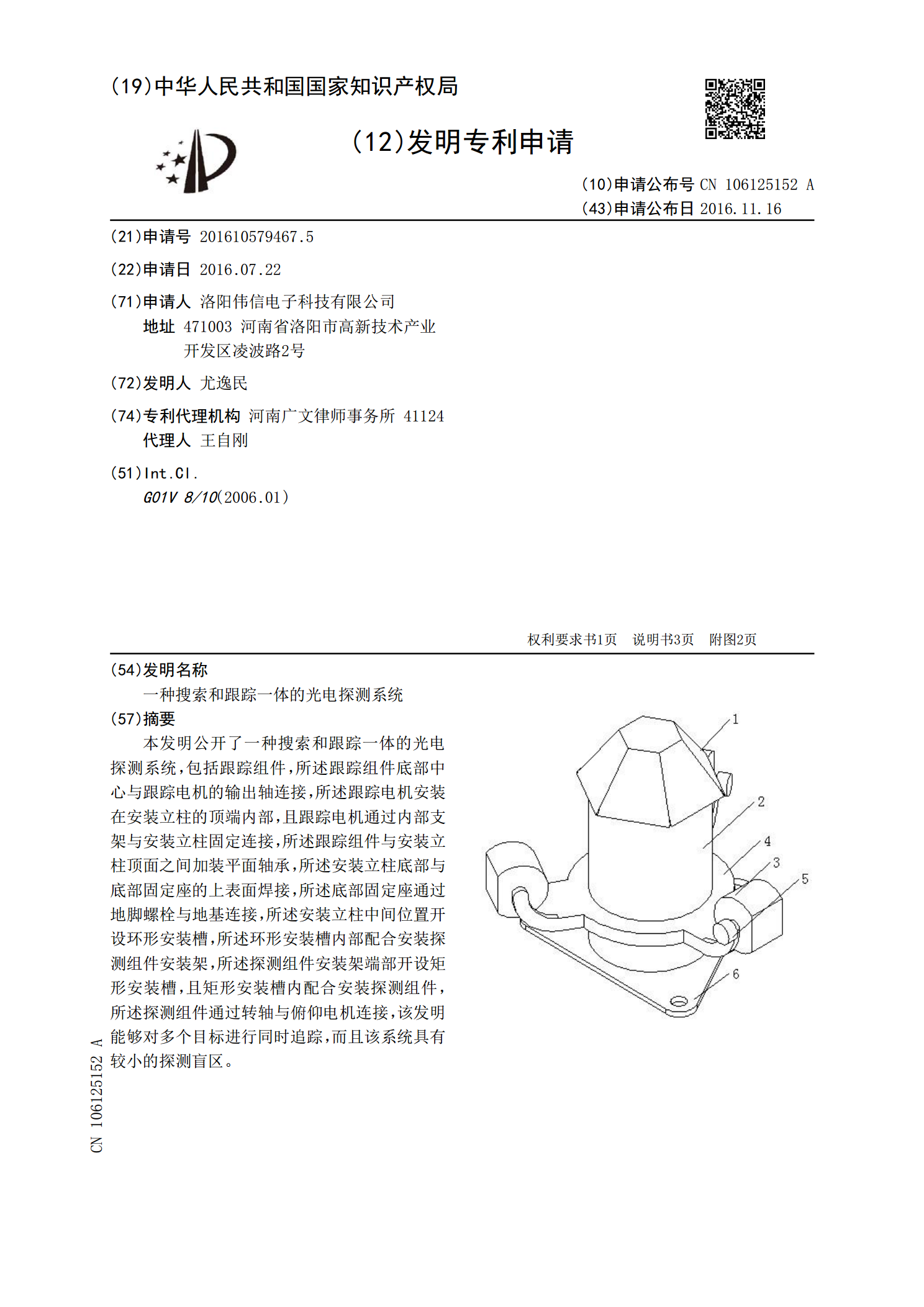
一种搜索和跟踪一体的光电探测系统.pdf
本发明公开了一种搜索和跟踪一体的光电探测系统,包括跟踪组件,所述跟踪组件底部中心与跟踪电机的输出轴连接,所述跟踪电机安装在安装立柱的顶端内部,且跟踪电机通过内部支架与安装立柱固定连接,所述跟踪组件与安装立柱顶面之间加装平面轴承,所述安装立柱底部与底部固定座的上表面焊接,所述底部固定座通过地脚螺栓与地基连接,所述安装立柱中间位置开设环形安装槽,所述环形安装槽内部配合安装探测组件安装架,所述探测组件安装架端部开设矩形安装槽,且矩形安装槽内配合安装探测组件,所述探测组件通过转轴与俯仰电机连接,该发明能够对多个目
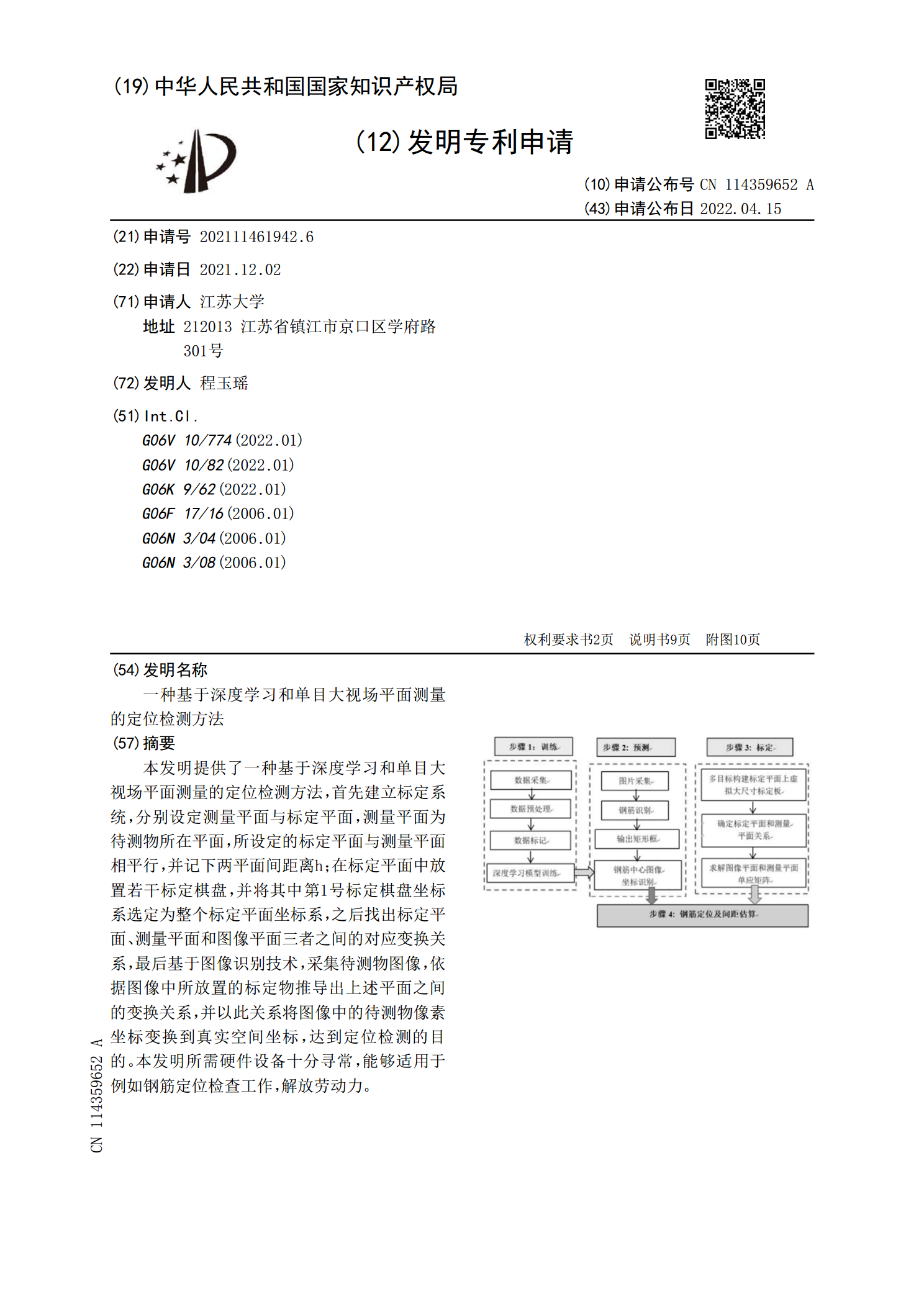
一种基于深度学习和单目大视场平面测量的定位检测方法.pdf
本发明提供了一种基于深度学习和单目大视场平面测量的定位检测方法,首先建立标定系统,分别设定测量平面与标定平面,测量平面为待测物所在平面,所设定的标定平面与测量平面相平行,并记下两平面间距离h;在标定平面中放置若干标定棋盘,并将其中第1号标定棋盘坐标系选定为整个标定平面坐标系,之后找出标定平面、测量平面和图像平面三者之间的对应变换关系,最后基于图像识别技术,采集待测物图像,依据图像中所放置的标定物推导出上述平面之间的变换关系,并以此关系将图像中的待测物像素坐标变换到真实空间坐标,达到定位检测的目的。本发明所