
一种多区域车机协同侦察路径规划方法及系统.pdf

是你****平呀


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多区域车机协同侦察路径规划方法及系统.pdf
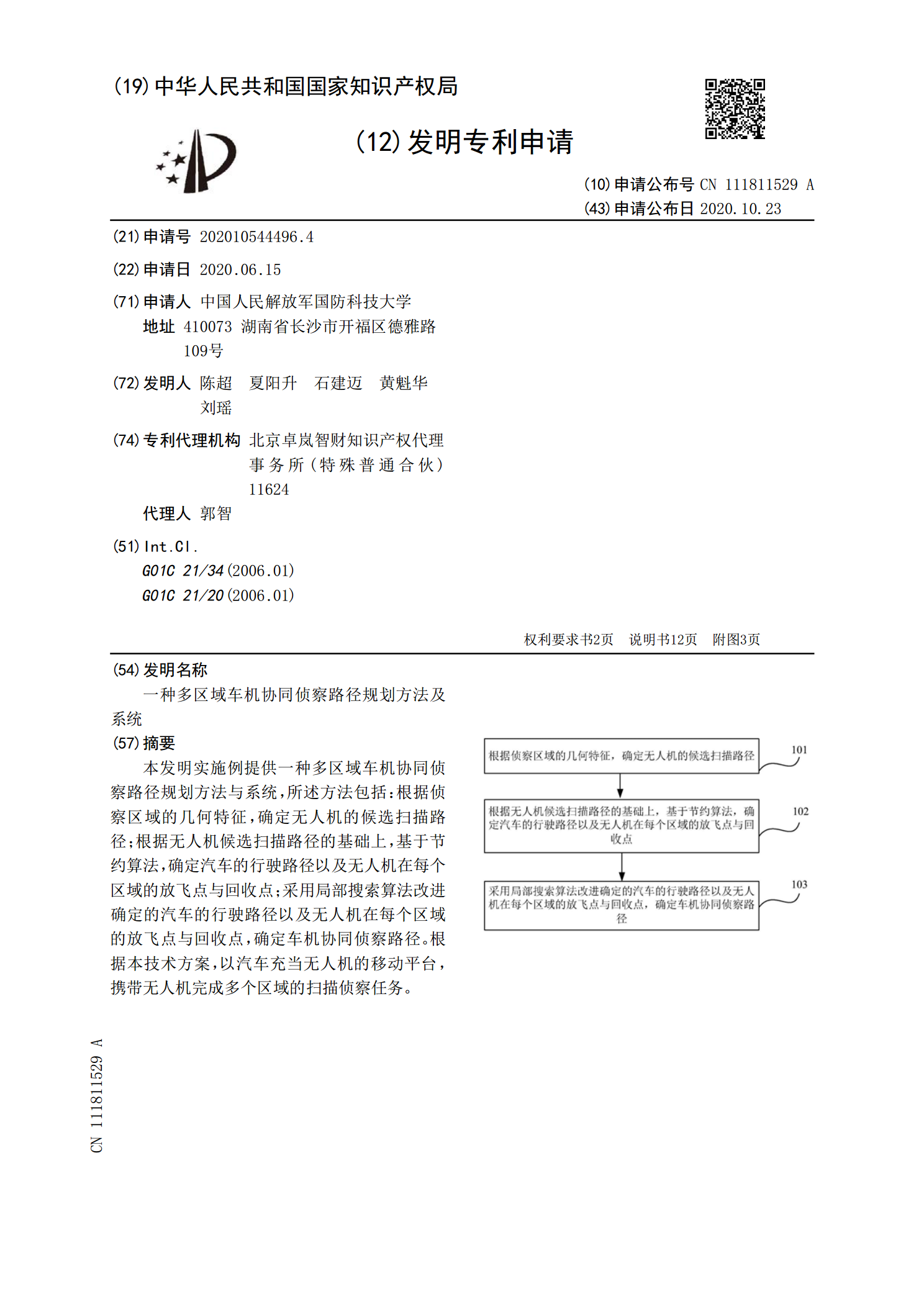
本发明实施例提供一种多区域车机协同侦察路径规划方法与系统,所述方法包括:根据侦察区域的几何特征,确定无人机的候选扫描路径;根据无人机候选扫描路径的基础上,基于节约算法,确定汽车的行驶路径以及无人机在每个区域的放飞点与回收点;采用局部搜索算法改进确定的汽车的行驶路径以及无人机在每个区域的放飞点与回收点,确定车机协同侦察路径。根据本技术方案,以汽车充当无人机的移动平台,携带无人机完成多个区域的扫描侦察任务。
一种车云协同路径规划方法及系统.pdf
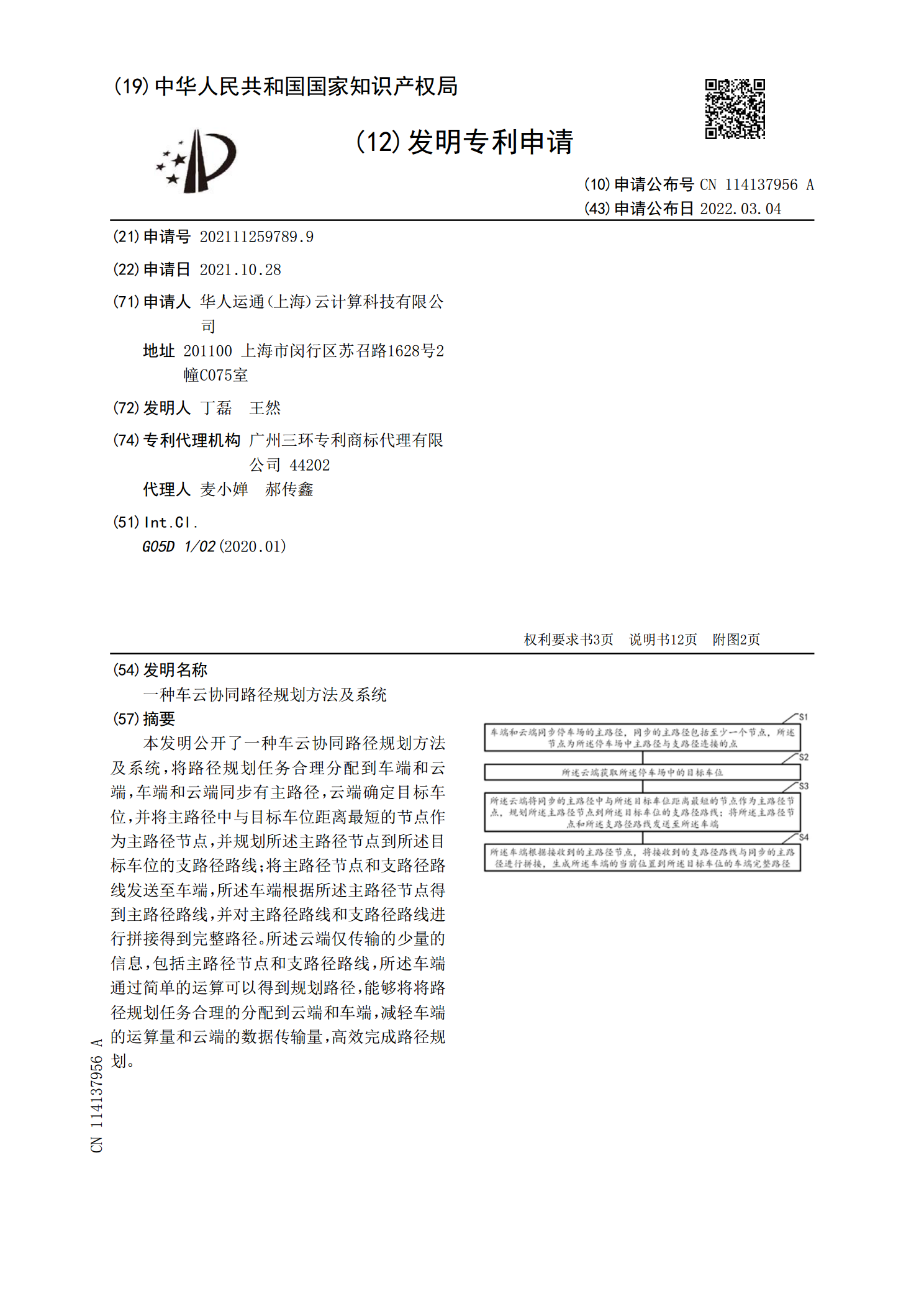
本发明公开了一种车云协同路径规划方法及系统,将路径规划任务合理分配到车端和云端,车端和云端同步有主路径,云端确定目标车位,并将主路径中与目标车位距离最短的节点作为主路径节点,并规划所述主路径节点到所述目标车位的支路径路线;将主路径节点和支路径路线发送至车端,所述车端根据所述主路径节点得到主路径路线,并对主路径路线和支路径路线进行拼接得到完整路径。所述云端仅传输的少量的信息,包括主路径节点和支路径路线,所述车端通过简单的运算可以得到规划路径,能够将将路径规划任务合理的分配到云端和车端,减轻车端的运算量和云端
多谷物联合收割机与运粮车协同作业路径规划方法、系统.pdf
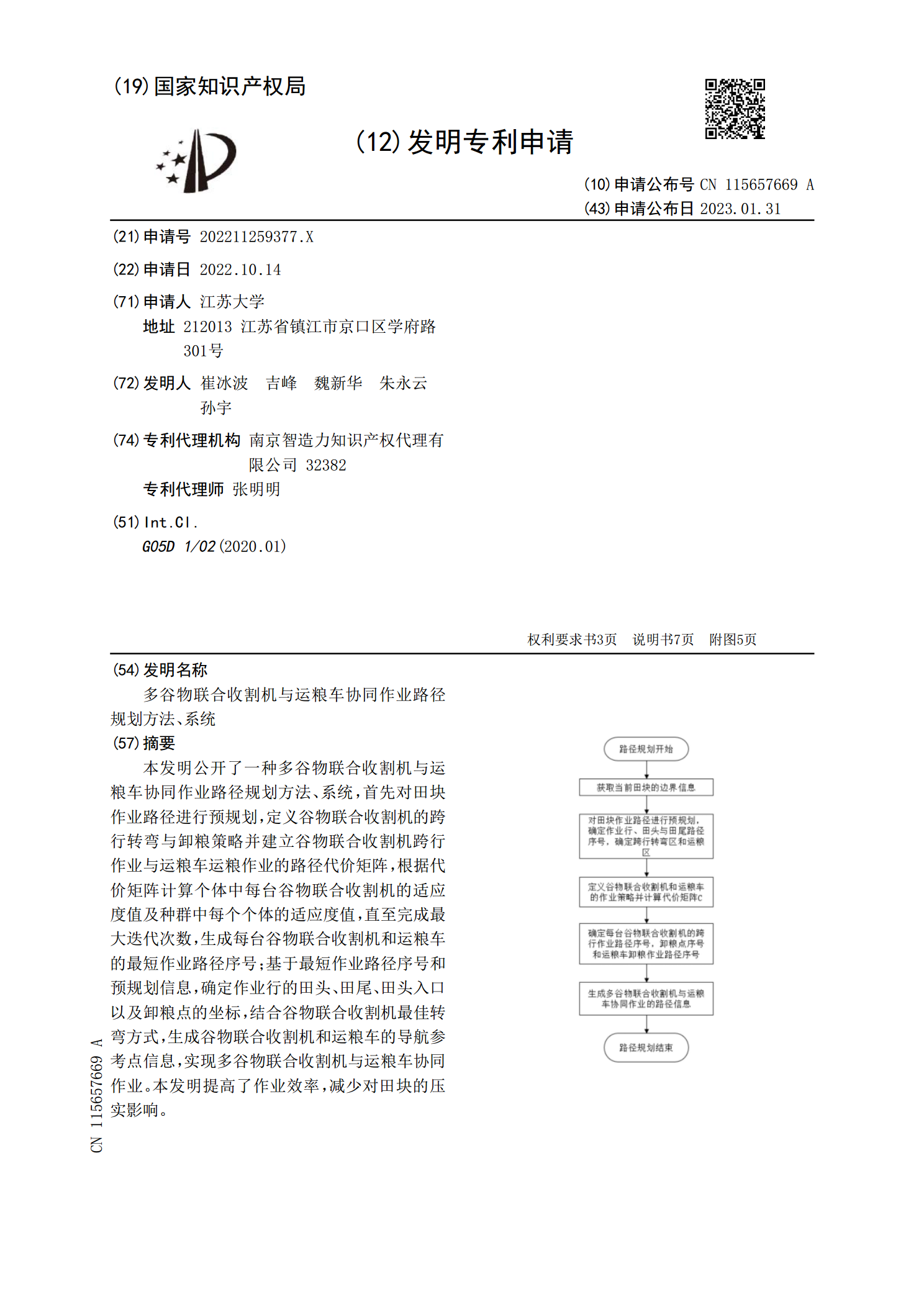
本发明公开了一种多谷物联合收割机与运粮车协同作业路径规划方法、系统,首先对田块作业路径进行预规划,定义谷物联合收割机的跨行转弯与卸粮策略并建立谷物联合收割机跨行作业与运粮车运粮作业的路径代价矩阵,根据代价矩阵计算个体中每台谷物联合收割机的适应度值及种群中每个个体的适应度值,直至完成最大迭代次数,生成每台谷物联合收割机和运粮车的最短作业路径序号;基于最短作业路径序号和预规划信息,确定作业行的田头、田尾、田头入口以及卸粮点的坐标,结合谷物联合收割机最佳转弯方式,生成谷物联合收割机和运粮车的导航参考点信息,实现

一种分区域农机协同作业路径规划方法.pdf
本发明公开了一种分区域农机协同作业路径规划方法,其包括以下步骤:建立分区域农田模型;输入农机的最小转弯半径,在分区域农田模型的基础上,建立农机协同作业路径规划模型;利用模拟退火算法求解农机协同作业路径规划模型;输出各台农机的作业路径;本发明能降低转弯路径总长度和时间,提高作业效率。

一种多车智能协同方法及系统.pdf
本发明涉及多车智能协同技术领域,公开了一种多车智能协同方法及系统,该方法包括:获取每辆车的转弯操作信息和每辆车的实时位置信息;各跟车接收储存头车的实时位置信息,生成头车导航路线并在所有跟车显示头车实时导航地图,或头车和各跟车接受储存所有车的实时位置信息,生成整体导航路线并在所有跟车显示整体实时导航地图;各跟车接收头车或前车的转弯操作信息,并根据转弯操作信息和实时位置信息在实时导航地图上显示车辆实时转弯情况。本发明方便了在车辆较多时进行跟车,也方便车辆掌握其他车辆的情况;同时,确保在路况复杂的情况下整个车队