
一种机械臂姿态误差补偿方法、装置、设备及存储介质.pdf

努力****星驰

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机械臂姿态误差补偿方法、装置、设备及存储介质.pdf
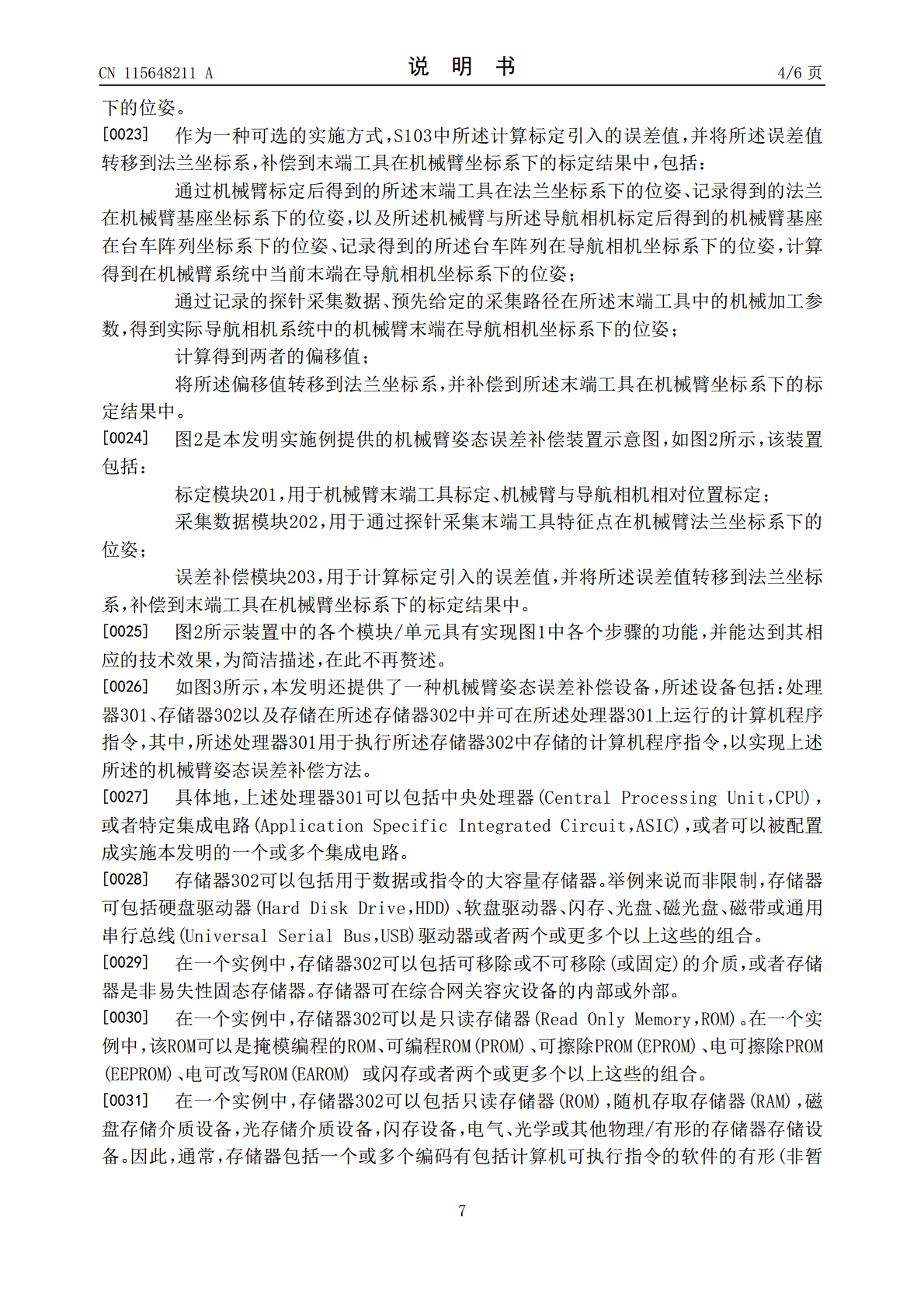
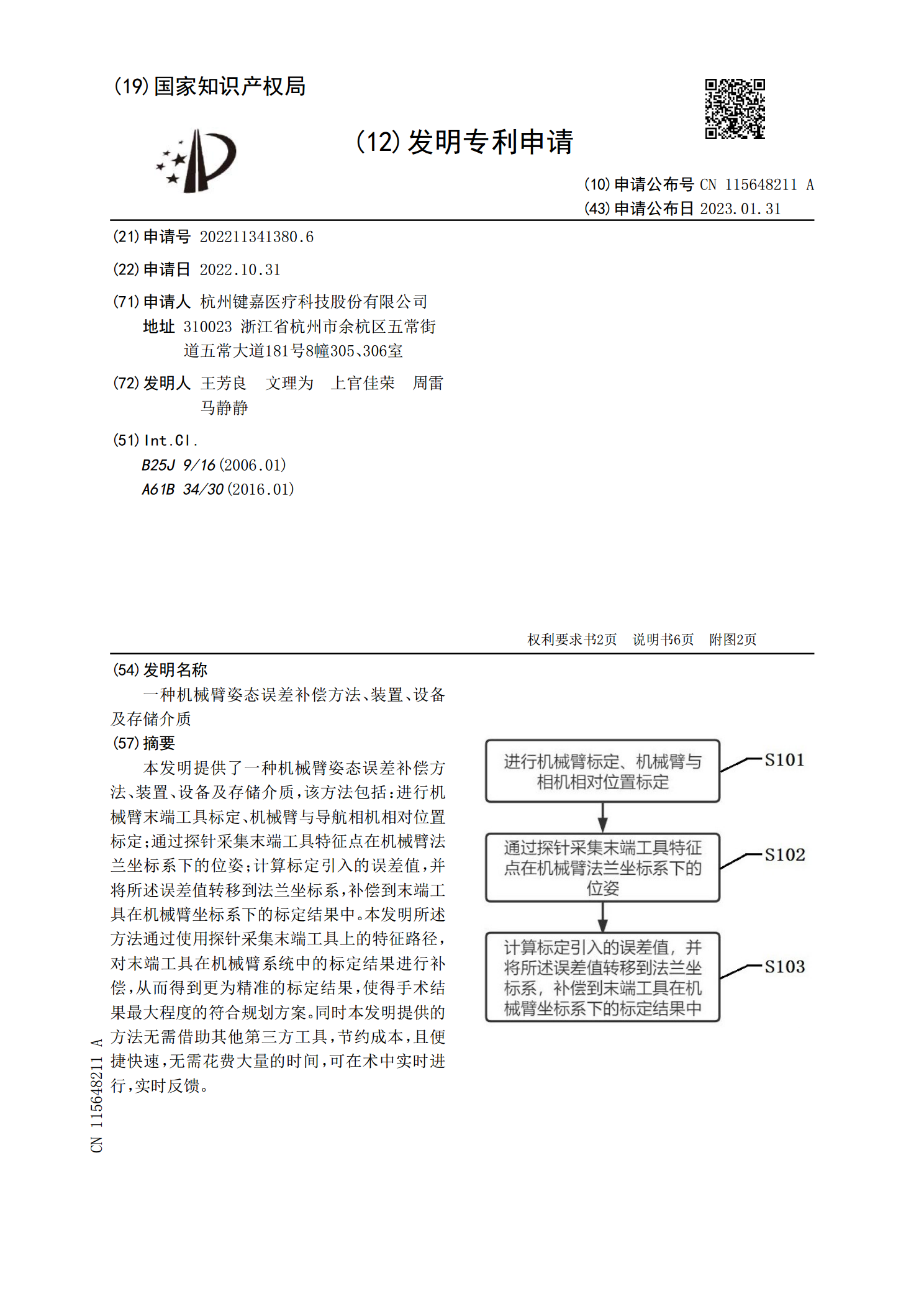
本发明提供了一种机械臂姿态误差补偿方法、装置、设备及存储介质,该方法包括:进行机械臂末端工具标定、机械臂与导航相机相对位置标定;通过探针采集末端工具特征点在机械臂法兰坐标系下的位姿;计算标定引入的误差值,并将所述误差值转移到法兰坐标系,补偿到末端工具在机械臂坐标系下的标定结果中。本发明所述方法通过使用探针采集末端工具上的特征路径,对末端工具在机械臂系统中的标定结果进行补偿,从而得到更为精准的标定结果,使得手术结果最大程度的符合规划方案。同时本发明提供的方法无需借助其他第三方工具,节约成本,且便捷快速,无需

一种误差补偿方法、装置及存储介质.pdf
本发明提供一种误差补偿方法、装置及存储介质,涉及精密平台技术领域,用于解决现有技术中定位精度低的问题。该方法包括:获取作业设备的目标标准位置,然后,读取预先建立好的标准位置与误差补偿数据的对应关系,其中,对应关系中的误差补偿数据为根据线性位移误差和直线度误差确定的,确定与目标标准位置对应的目标误差补偿数据,接着,根据目标标准位置和目标误差补偿数据,确定作业设备的实际作业位置。这样一来,可以有效提高作业设备的定位精度。
工业机器人多源误差补偿方法、装置、设备及存储介质.pdf
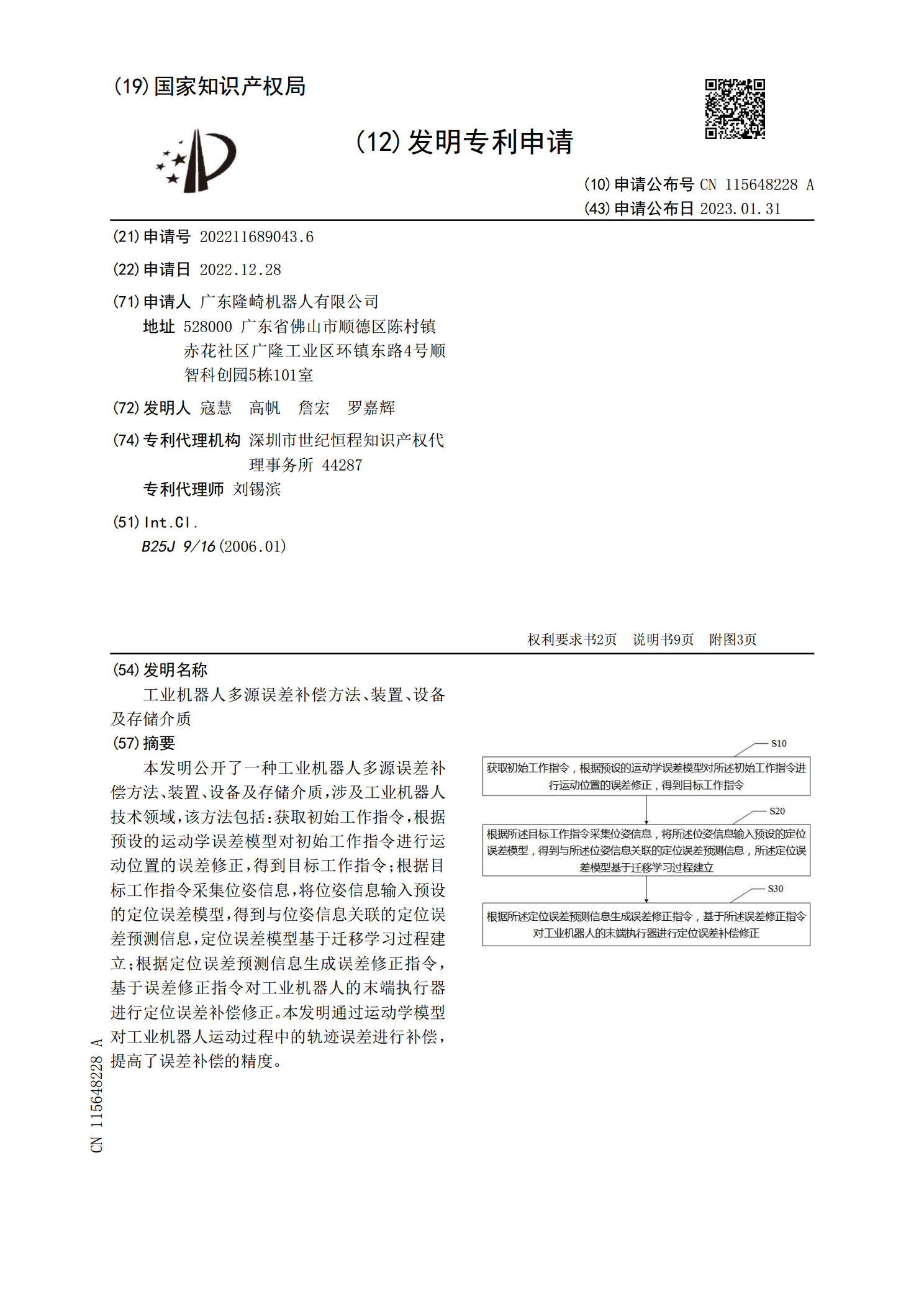
本发明公开了一种工业机器人多源误差补偿方法、装置、设备及存储介质,涉及工业机器人技术领域,该方法包括:获取初始工作指令,根据预设的运动学误差模型对初始工作指令进行运动位置的误差修正,得到目标工作指令;根据目标工作指令采集位姿信息,将位姿信息输入预设的定位误差模型,得到与位姿信息关联的定位误差预测信息,定位误差模型基于迁移学习过程建立;根据定位误差预测信息生成误差修正指令,基于误差修正指令对工业机器人的末端执行器进行定位误差补偿修正。本发明通过运动学模型对工业机器人运动过程中的轨迹误差进行补偿,提高了误差补
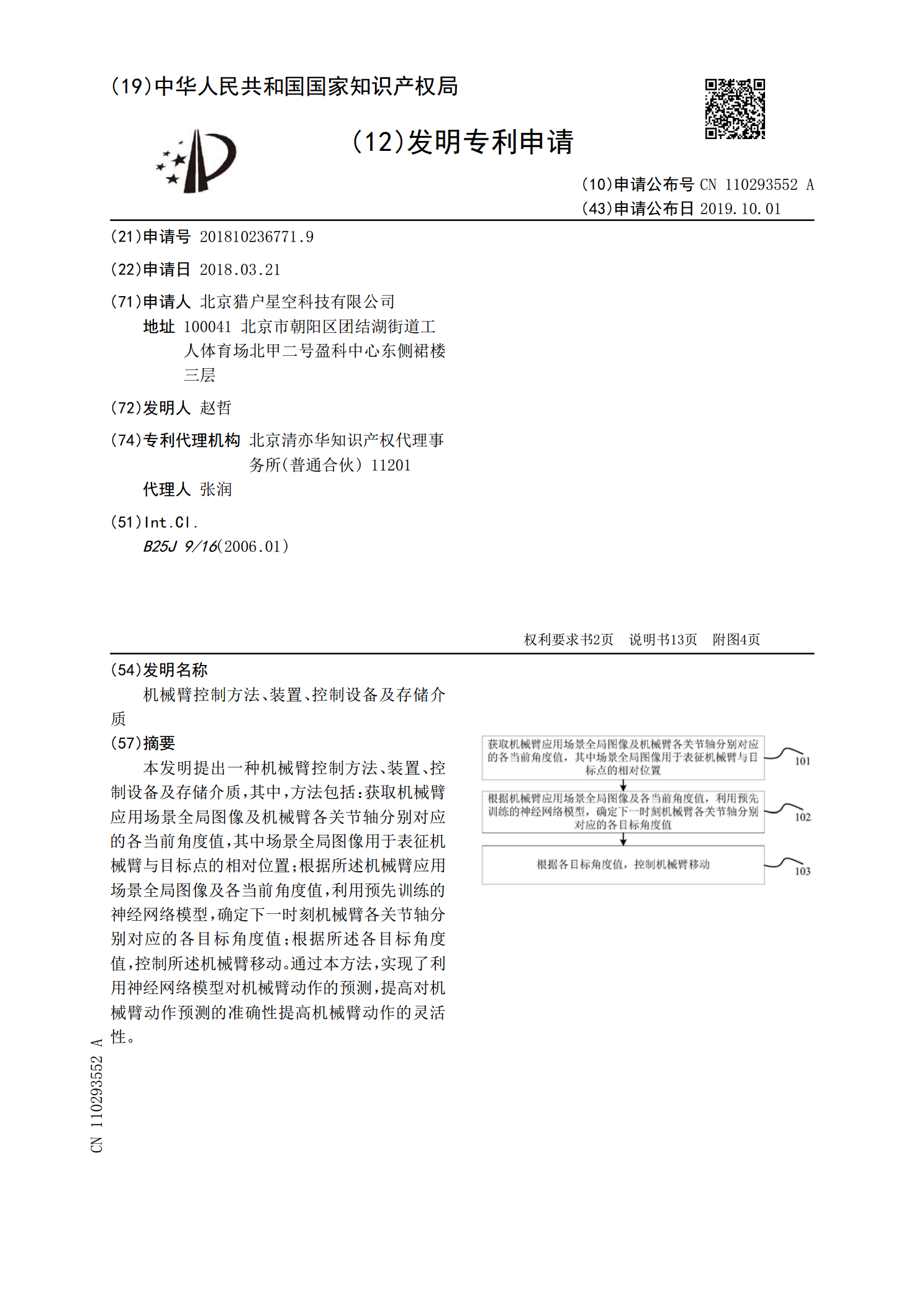
机械臂控制方法、装置、控制设备及存储介质.pdf
本发明提出一种机械臂控制方法、装置、控制设备及存储介质,其中,方法包括:获取机械臂应用场景全局图像及机械臂各关节轴分别对应的各当前角度值,其中场景全局图像用于表征机械臂与目标点的相对位置;根据所述机械臂应用场景全局图像及各当前角度值,利用预先训练的神经网络模型,确定下一时刻机械臂各关节轴分别对应的各目标角度值;根据所述各目标角度值,控制所述机械臂移动。通过本方法,实现了利用神经网络模型对机械臂动作的预测,提高对机械臂动作预测的准确性提高机械臂动作的灵活性。
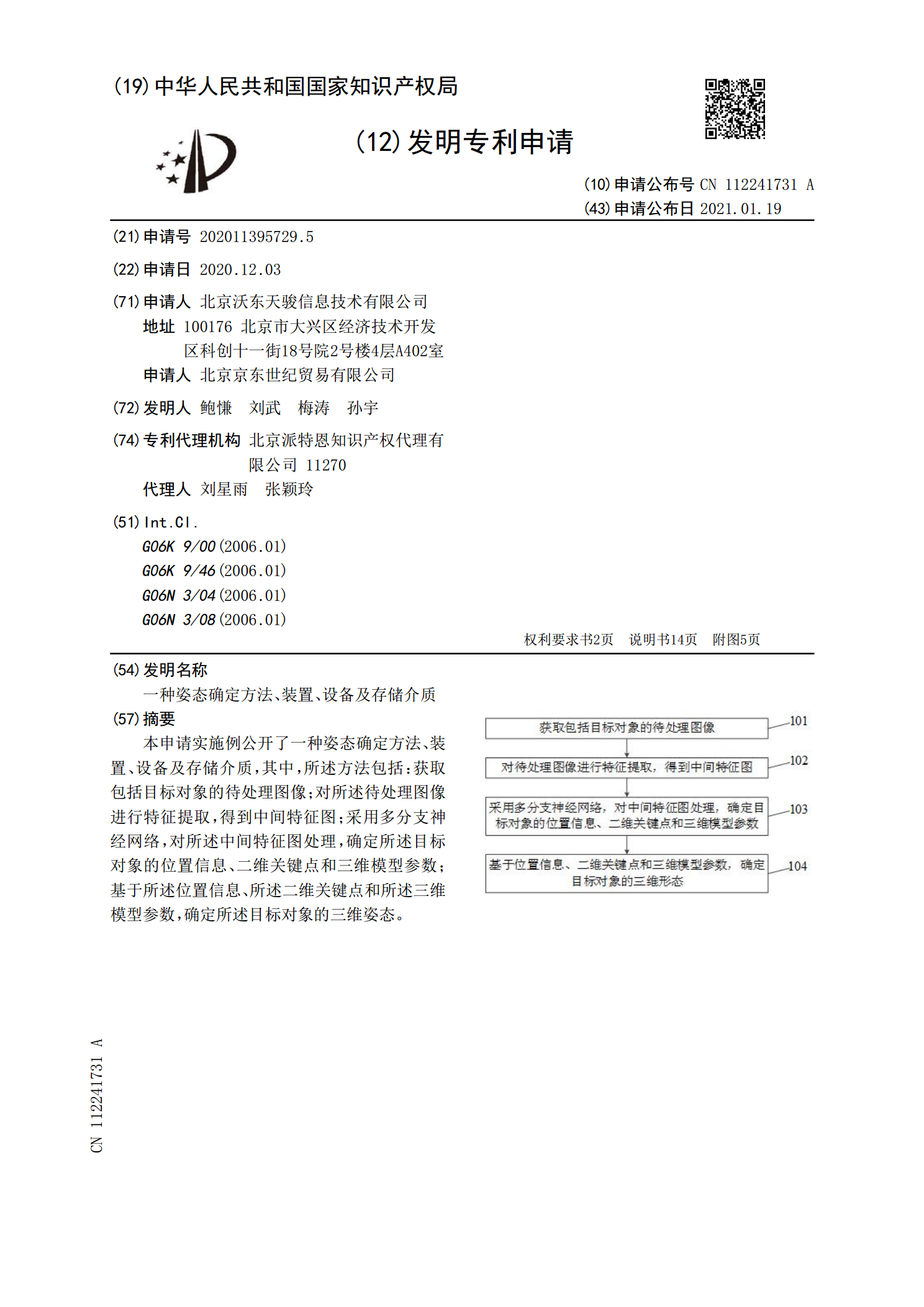
一种姿态确定方法、装置、设备及存储介质.pdf
本申请实施例公开了一种姿态确定方法、装置、设备及存储介质,其中,所述方法包括:获取包括目标对象的待处理图像;对所述待处理图像进行特征提取,得到中间特征图;采用多分支神经网络,对所述中间特征图处理,确定所述目标对象的位置信息、二维关键点和三维模型参数;基于所述位置信息、所述二维关键点和所述三维模型参数,确定所述目标对象的三维姿态。