
机械臂、机械臂关节及扭矩检测装置.pdf

一条****淑淑


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机械臂、机械臂关节及扭矩检测装置.pdf
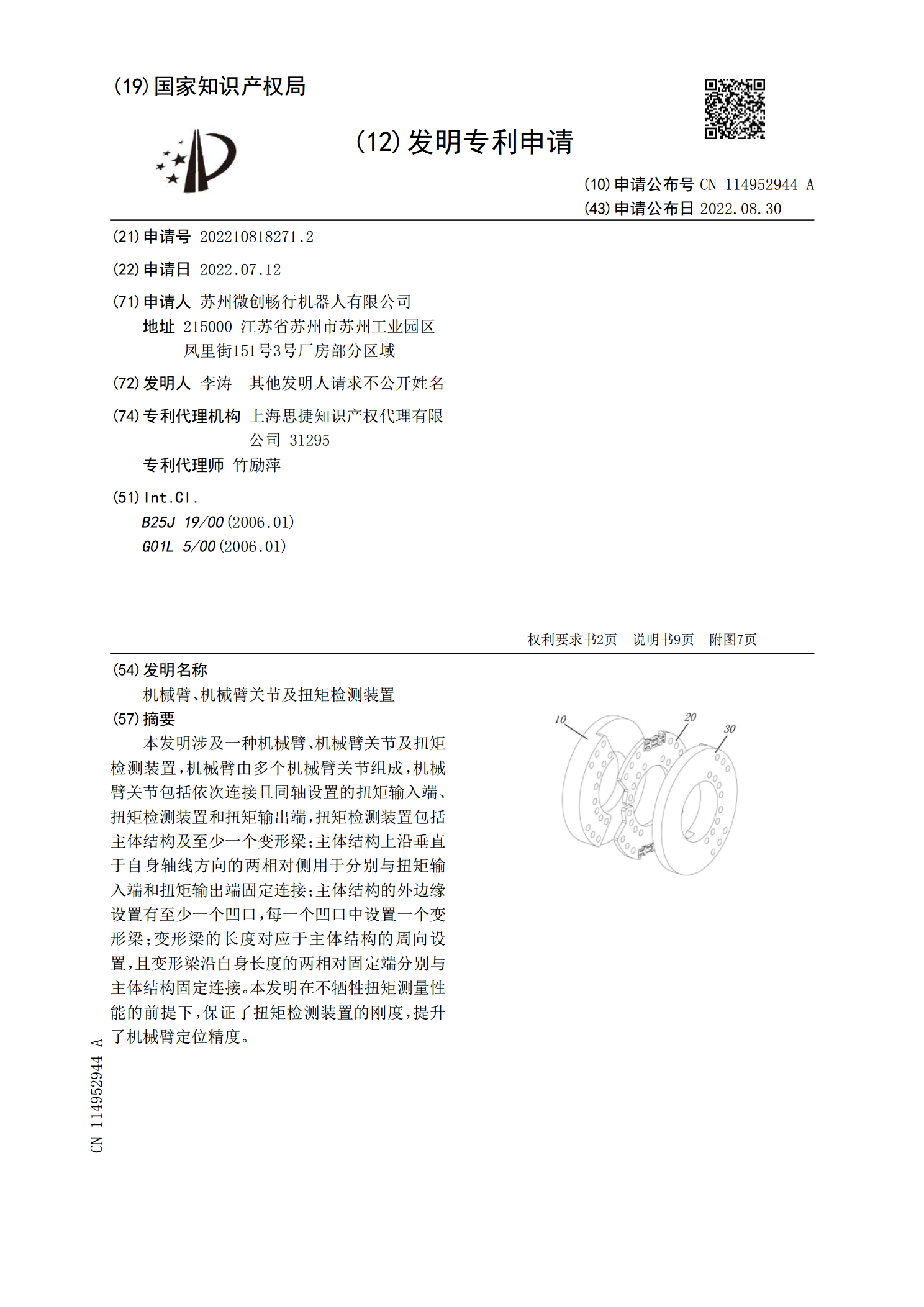
本发明涉及一种机械臂、机械臂关节及扭矩检测装置,机械臂由多个机械臂关节组成,机械臂关节包括依次连接且同轴设置的扭矩输入端、扭矩检测装置和扭矩输出端,扭矩检测装置包括主体结构及至少一个变形梁;主体结构上沿垂直于自身轴线方向的两相对侧用于分别与扭矩输入端和扭矩输出端固定连接;主体结构的外边缘设置有至少一个凹口,每一个凹口中设置一个变形梁;变形梁的长度对应于主体结构的周向设置,且变形梁沿自身长度的两相对固定端分别与主体结构固定连接。本发明在不牺牲扭矩测量性能的前提下,保证了扭矩检测装置的刚度,提升了机械臂定位精
机械臂关节及串联机械臂.pdf
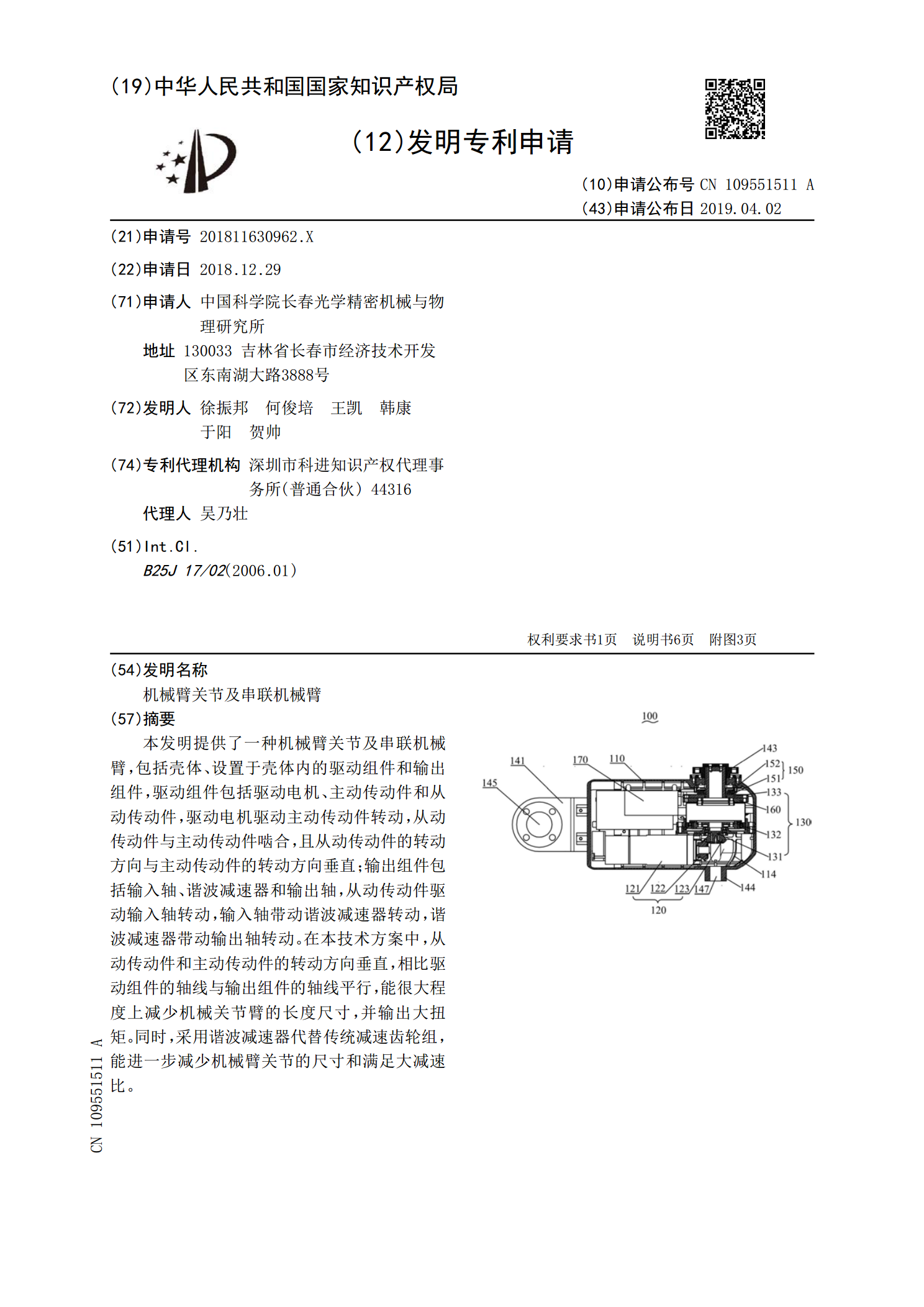
本发明提供了一种机械臂关节及串联机械臂,包括壳体、设置于壳体内的驱动组件和输出组件,驱动组件包括驱动电机、主动传动件和从动传动件,驱动电机驱动主动传动件转动,从动传动件与主动传动件啮合,且从动传动件的转动方向与主动传动件的转动方向垂直;输出组件包括输入轴、谐波减速器和输出轴,从动传动件驱动输入轴转动,输入轴带动谐波减速器转动,谐波减速器带动输出轴转动。在本技术方案中,从动传动件和主动传动件的转动方向垂直,相比驱动组件的轴线与输出组件的轴线平行,能很大程度上减少机械关节臂的长度尺寸,并输出大扭矩。同时,采用
一种主手机械臂和主手机械臂的关节扭矩控制方法.pdf
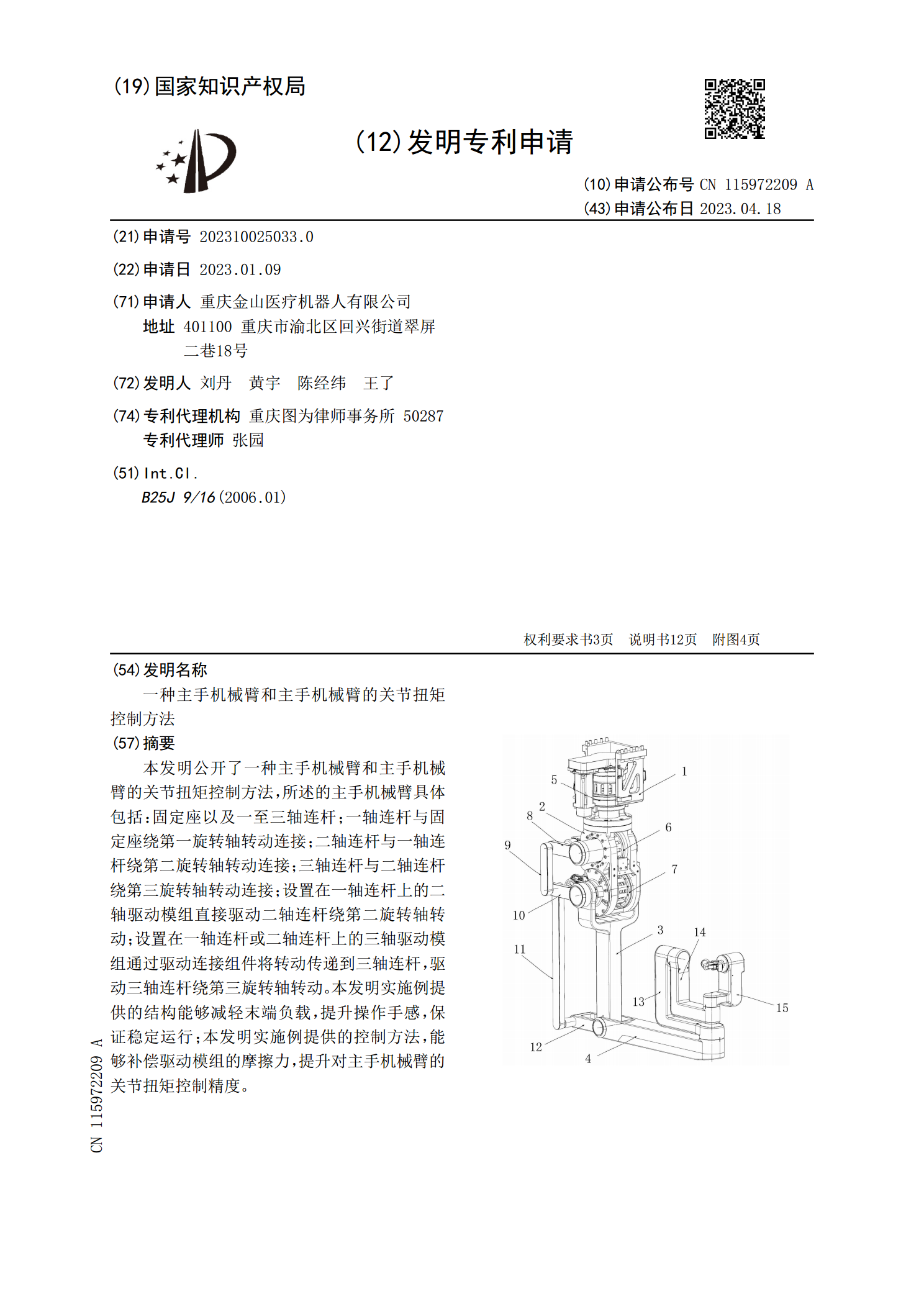
本发明公开了一种主手机械臂和主手机械臂的关节扭矩控制方法,所述的主手机械臂具体包括:固定座以及一至三轴连杆;一轴连杆与固定座绕第一旋转轴转动连接;二轴连杆与一轴连杆绕第二旋转轴转动连接;三轴连杆与二轴连杆绕第三旋转轴转动连接;设置在一轴连杆上的二轴驱动模组直接驱动二轴连杆绕第二旋转轴转动;设置在一轴连杆或二轴连杆上的三轴驱动模组通过驱动连接组件将转动传递到三轴连杆,驱动三轴连杆绕第三旋转轴转动。本发明实施例提供的结构能够减轻末端负载,提升操作手感,保证稳定运行;本发明实施例提供的控制方法,能够补偿驱动模组
机械臂转动关节及医生机械臂.pdf
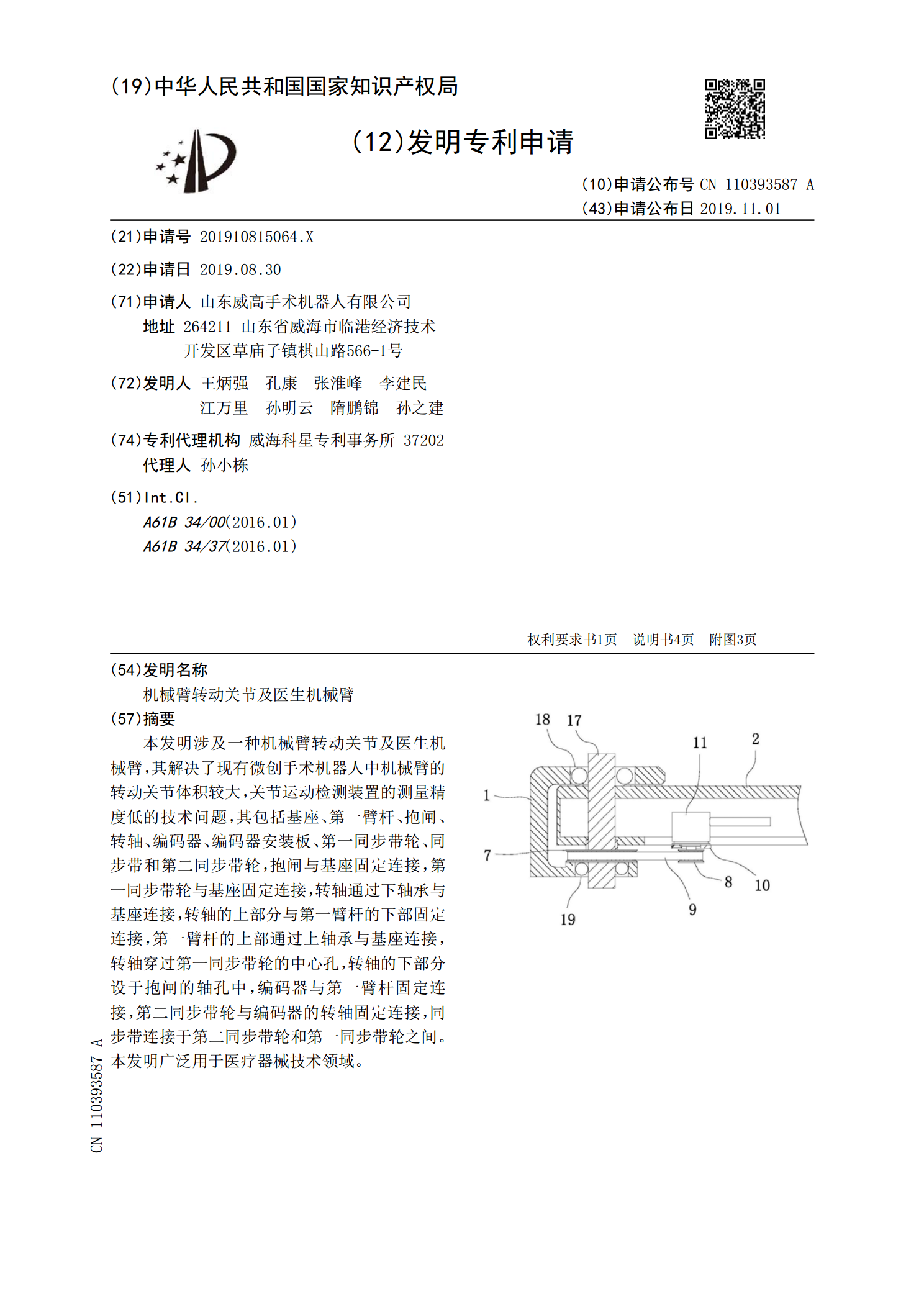
本发明涉及一种机械臂转动关节及医生机械臂,其解决了现有微创手术机器人中机械臂的转动关节体积较大,关节运动检测装置的测量精度低的技术问题,其包括基座、第一臂杆、抱闸、转轴、编码器、编码器安装板、第一同步带轮、同步带和第二同步带轮,抱闸与基座固定连接,第一同步带轮与基座固定连接,转轴通过下轴承与基座连接,转轴的上部分与第一臂杆的下部固定连接,第一臂杆的上部通过上轴承与基座连接,转轴穿过第一同步带轮的中心孔,转轴的下部分设于抱闸的轴孔中,编码器与第一臂杆固定连接,第二同步带轮与编码器的转轴固定连接,同步带连接于
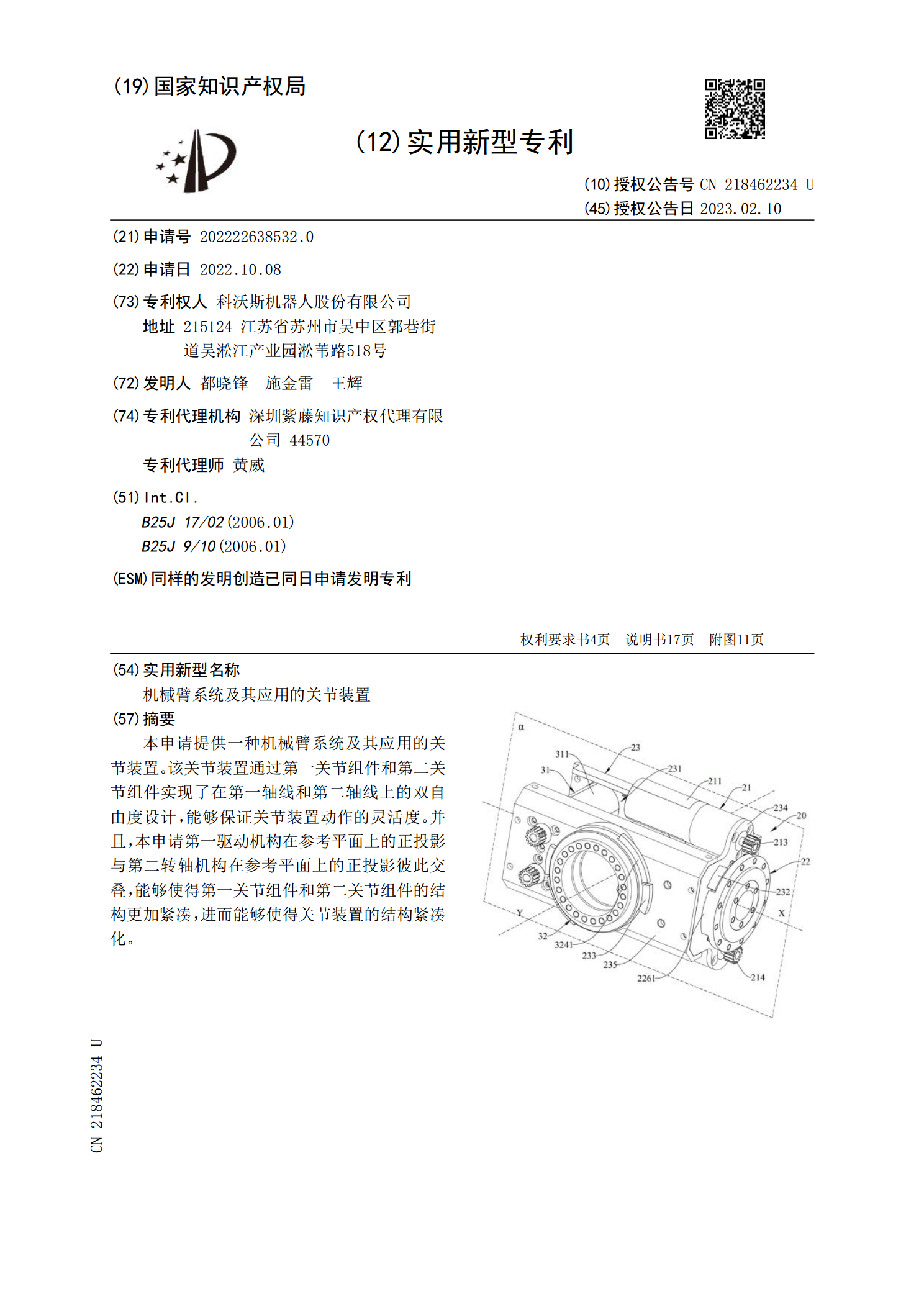
机械臂系统及其应用的关节装置.pdf
本申请提供一种机械臂系统及其应用的关节装置。该关节装置通过第一关节组件和第二关节组件实现了在第一轴线和第二轴线上的双自由度设计,能够保证关节装置动作的灵活度。并且,本申请第一驱动机构在参考平面上的正投影与第二转轴机构在参考平面上的正投影彼此交叠,能够使得第一关节组件和第二关节组件的结构更加紧凑,进而能够使得关节装置的结构紧凑化。