
负荷确定系统及其组装方法.pdf

是你****优呀

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
负荷确定系统及其组装方法.pdf
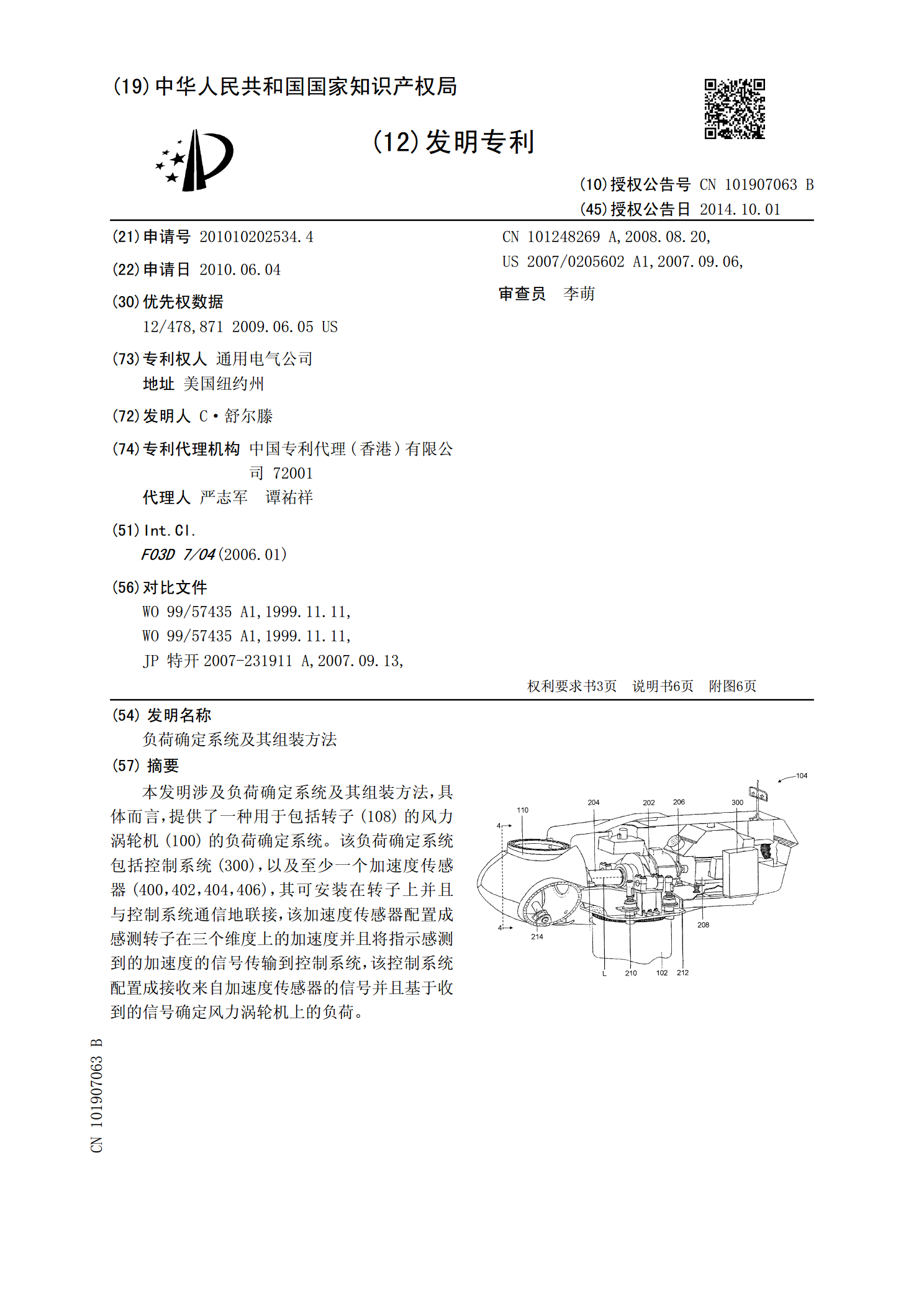
本发明涉及负荷确定系统及其组装方法,具体而言,提供了一种用于包括转子(108)的风力涡轮机(100)的负荷确定系统。该负荷确定系统包括控制系统(300),以及至少一个加速度传感器(400,402,404,406),其可安装在转子上并且与控制系统通信地联接,该加速度传感器配置成感测转子在三个维度上的加速度并且将指示感测到的加速度的信号传输到控制系统,该控制系统配置成接收来自加速度传感器的信号并且基于收到的信号确定风力涡轮机上的负荷。
燃烧系统及其组装方法.pdf
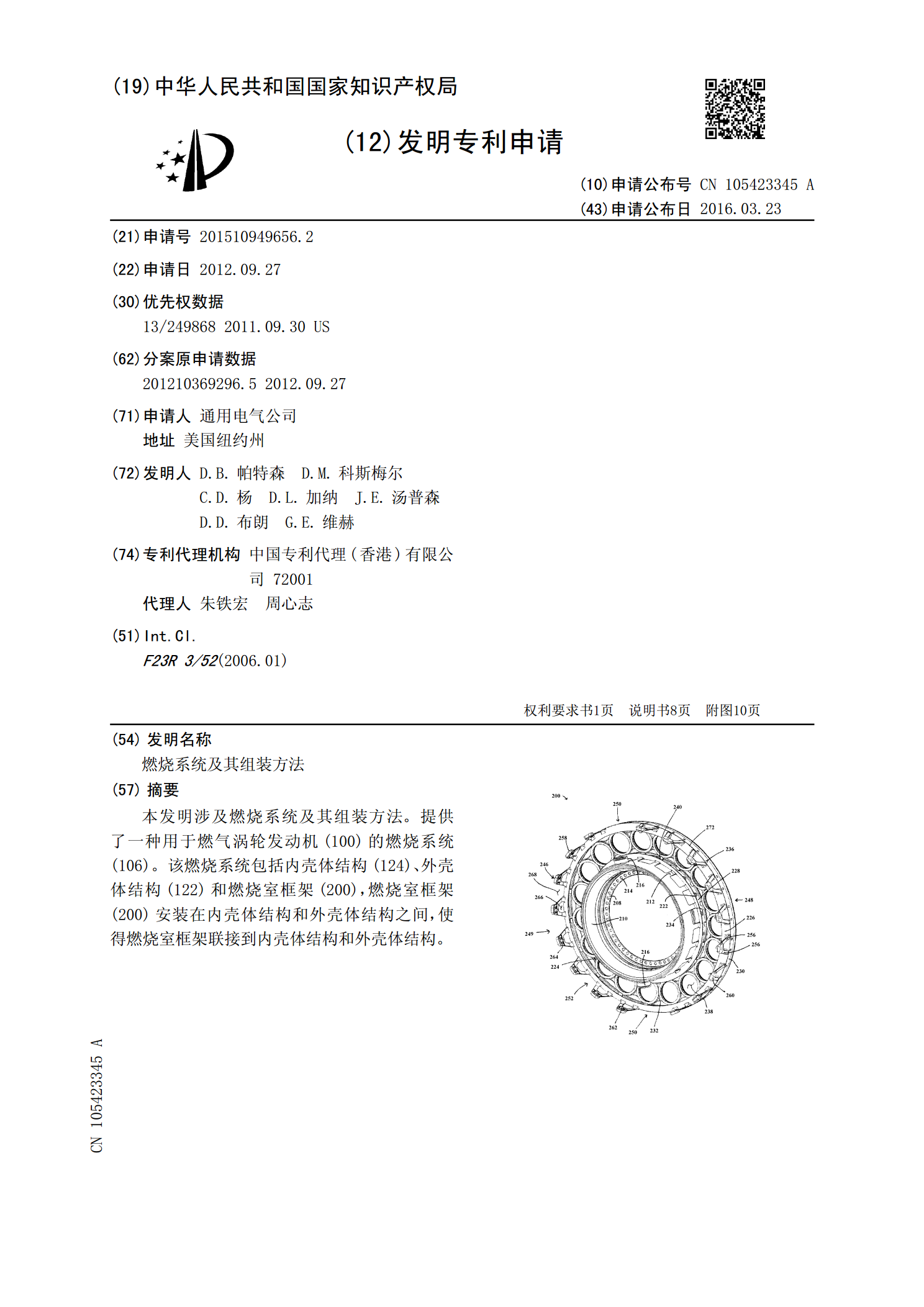
本发明涉及燃烧系统及其组装方法。提供了一种用于燃气涡轮发动机(100)的燃烧系统(106)。该燃烧系统包括内壳体结构(124)、外壳体结构(122)和燃烧室框架(200),燃烧室框架(200)安装在内壳体结构和外壳体结构之间,使得燃烧室框架联接到内壳体结构和外壳体结构。

燃烧系统及其组装方法.pdf
本发明涉及燃烧系统及其组装方法。提供了一种用于燃气涡轮发动机(100)的燃烧系统(106)。该燃烧系统包括内壳体结构(124)、外壳体结构(122)和燃烧室框架(200),燃烧室框架(200)安装在内壳体结构和外壳体结构之间,使得燃烧室框架联接到内壳体结构和外壳体结构。

用于确定轮胎负荷的基于压电的系统和方法.pdf
从测得轮胎参数确定轮胎负荷的系统和方法包括使用基于压电的传感器获得一个或多个接地印迹参数(例如,接地印迹进入时间、接地印迹离开时间、总接地印迹时间和接地印迹角)以及使用一个或多个附加传感器以获得轮胎压力。选定接地印迹参数测量和压力值然后与存储在查找表中的接地印迹参数值和压力值的已知组合比较。相应的被确定轮胎负荷值然后作为电子输出被提供。

背光模组、背光模组的组装方法及其组装系统.pdf
本申请提供了一种背光模组、背光模组的组装方法及其组装系统。背光模组的组装方法包括:将光源组件固定于导光板的一端,形成第一组件;通过调整第一组件与背板的底板的倾斜角度,将第一组件自动装配于底板上,且第一组件的一部分位于背板的U型结构内;其中,U型结构为背板的一侧板折弯形成。通过将光源组件和导光板固定在一起形成第一组件,并通过调整第一组件与背板的底板的倾斜角度,将第一组件自动装配于带有U型结构的背板上,可实现背光模组的自动化组装,节约人工成本和提高组装效率。