
货物搬运机器人及其控制方法.pdf

邻家****ng


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

货物搬运机器人及其控制方法.pdf
本公开涉及一种货物搬运机器人及其控制方法,该机器人包括底盘组件、门架组件、升降组件和至少两个辅助支撑装置;门架组件设置在底盘组件上,升降组件被配置为沿着门架组件的延伸方向移动,至少两个辅助支撑装置受控于各自的驱动组件,并分别分布在货物搬运机器人对的两侧,至少两个辅助支撑装置被构造为相对于货物搬运机器人伸出至与货物搬运机器人对应侧的料架相抵或分离。本公开的货物搬运机器人,可以保证其工作时的稳定性和安全性。
一种货物搬运机器人及其搬运方法.pdf
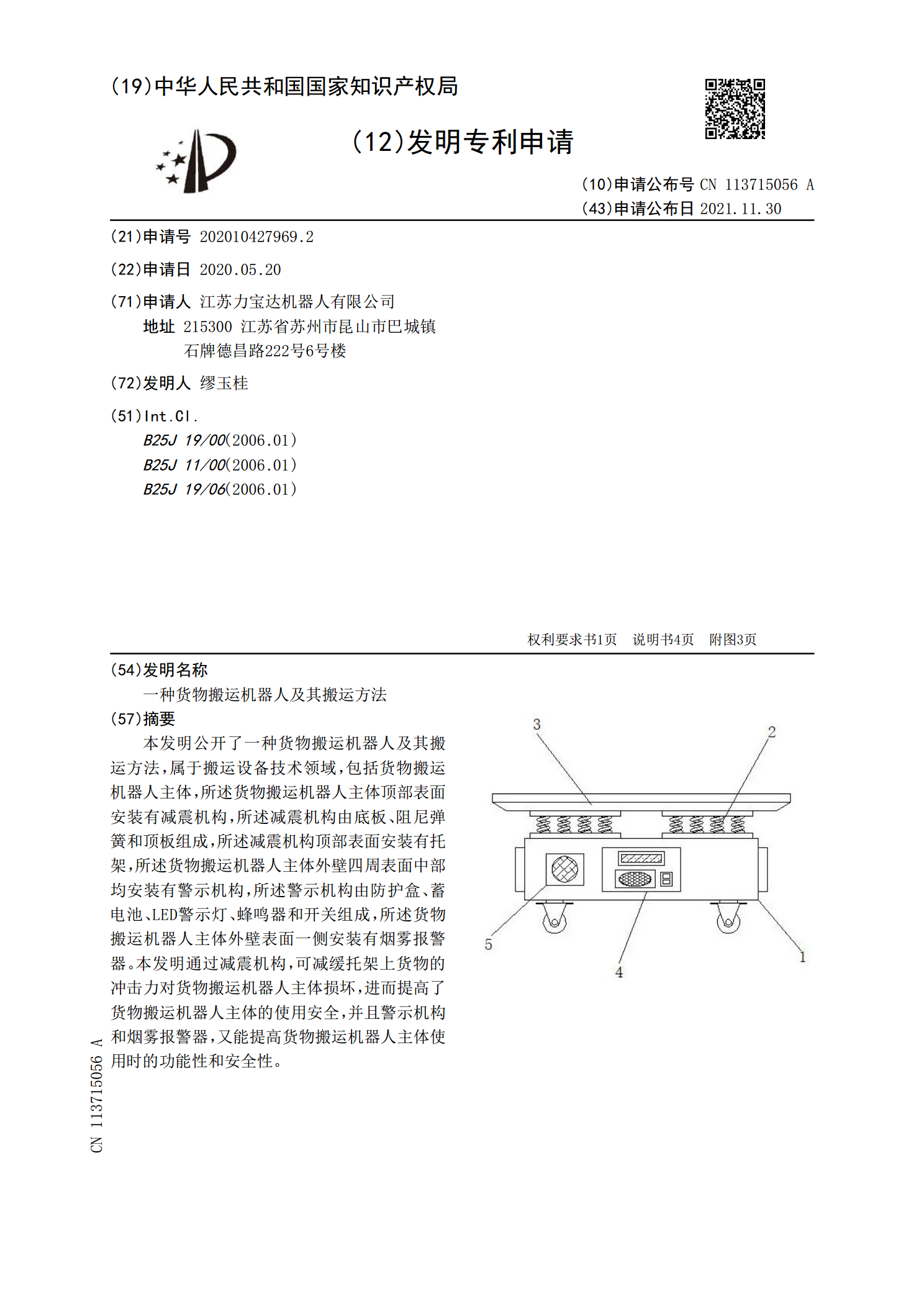
本发明公开了一种货物搬运机器人及其搬运方法,属于搬运设备技术领域,包括货物搬运机器人主体,所述货物搬运机器人主体顶部表面安装有减震机构,所述减震机构由底板、阻尼弹簧和顶板组成,所述减震机构顶部表面安装有托架,所述货物搬运机器人主体外壁四周表面中部均安装有警示机构,所述警示机构由防护盒、蓄电池、LED警示灯、蜂鸣器和开关组成,所述货物搬运机器人主体外壁表面一侧安装有烟雾报警器。本发明通过减震机构,可减缓托架上货物的冲击力对货物搬运机器人主体损坏,进而提高了货物搬运机器人主体的使用安全,并且警示机构和烟雾报警

货物搬运方法、机器人、控制终端以及仓储系统.pdf
本申请提供一种货物搬运方法、机器人、控制终端以及仓储系统,方法包括:在当前机器人前往货物搬运目的地的行进路线上存在其他机器人时,获取辅助传输策略,辅助传输策略用于辅助当前机器人将所搬运的当前货物通过其他机器人传输至货物搬运目的地;根据辅助传输策略,通过其他机器人依次对当前货物进行传输,直至当前货物到达货物搬运目的地。本申请中,在当前机器人自身未靠近货物搬运目的地的情况下,基于辅助传输策略,当前机器人也可以通过相对较为靠近该目的地的其他机器人将货物传输至目的地,从而,保证当前机器人可以完成货物传输并离开,避
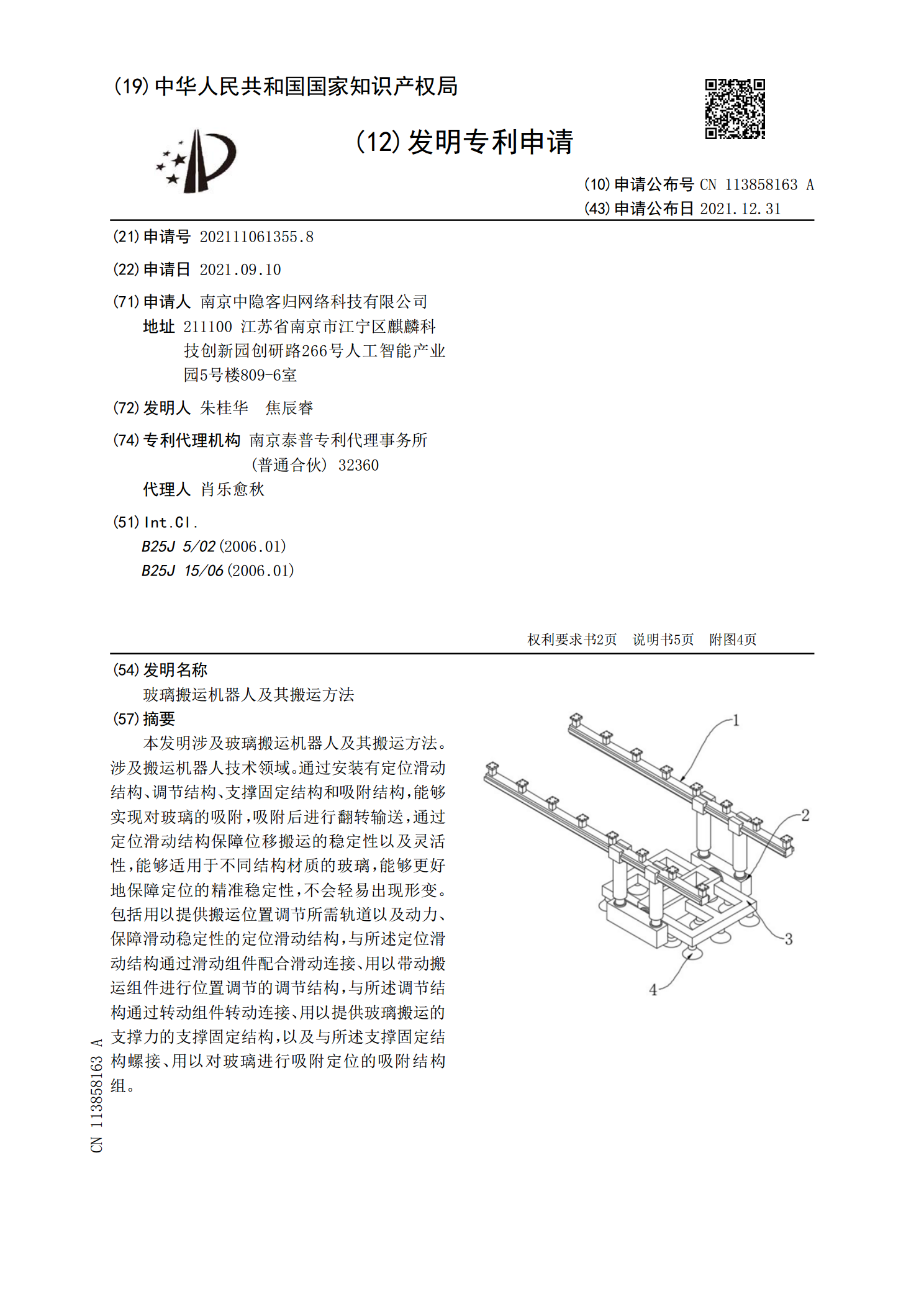
玻璃搬运机器人及其搬运方法.pdf
本发明涉及玻璃搬运机器人及其搬运方法。涉及搬运机器人技术领域。通过安装有定位滑动结构、调节结构、支撑固定结构和吸附结构,能够实现对玻璃的吸附,吸附后进行翻转输送,通过定位滑动结构保障位移搬运的稳定性以及灵活性,能够适用于不同结构材质的玻璃,能够更好地保障定位的精准稳定性,不会轻易出现形变。包括用以提供搬运位置调节所需轨道以及动力、保障滑动稳定性的定位滑动结构,与所述定位滑动结构通过滑动组件配合滑动连接、用以带动搬运组件进行位置调节的调节结构,与所述调节结构通过转动组件转动连接、用以提供玻璃搬运的支撑力的支
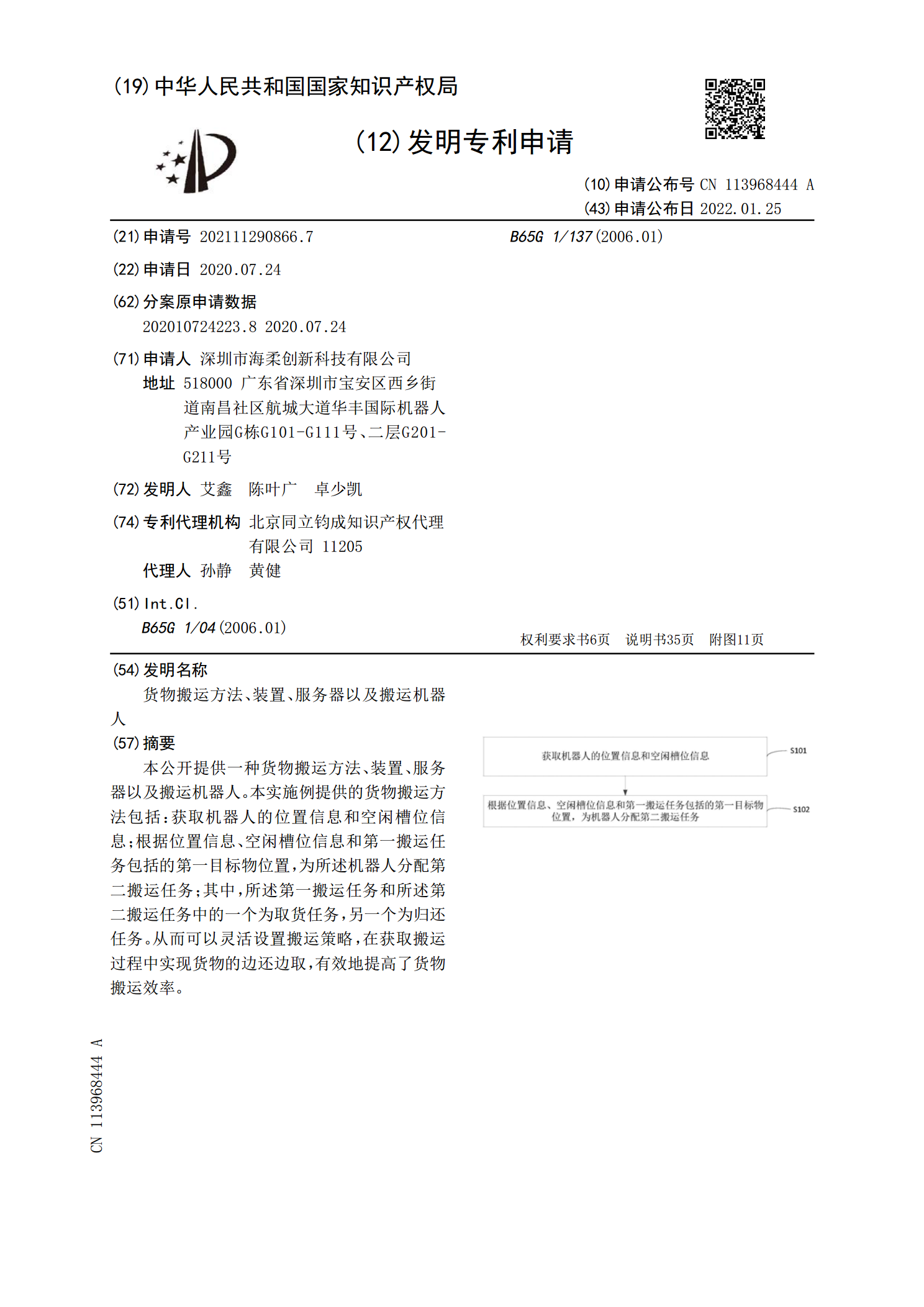
货物搬运方法、装置、服务器以及搬运机器人.pdf
本公开提供一种货物搬运方法、装置、服务器以及搬运机器人。本实施例提供的货物搬运方法包括:获取机器人的位置信息和空闲槽位信息;根据位置信息、空闲槽位信息和第一搬运任务包括的第一目标物位置,为所述机器人分配第二搬运任务;其中,所述第一搬运任务和所述第二搬运任务中的一个为取货任务,另一个为归还任务。从而可以灵活设置搬运策略,在获取搬运过程中实现货物的边还边取,有效地提高了货物搬运效率。