
一种基于视觉特性的盲元剔除方法.pdf

闪闪****魔王

1/6

2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉特性的盲元剔除方法.pdf
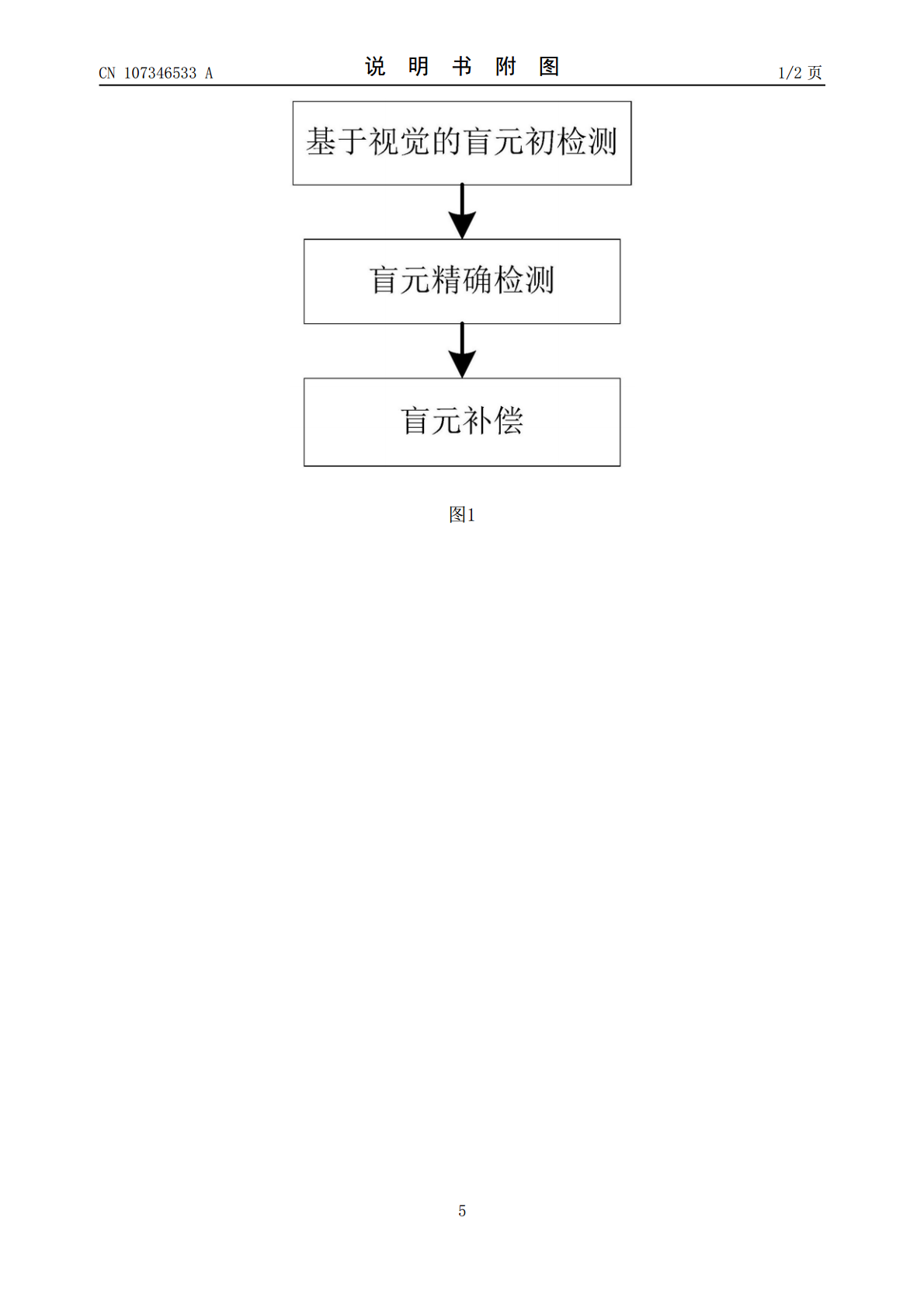
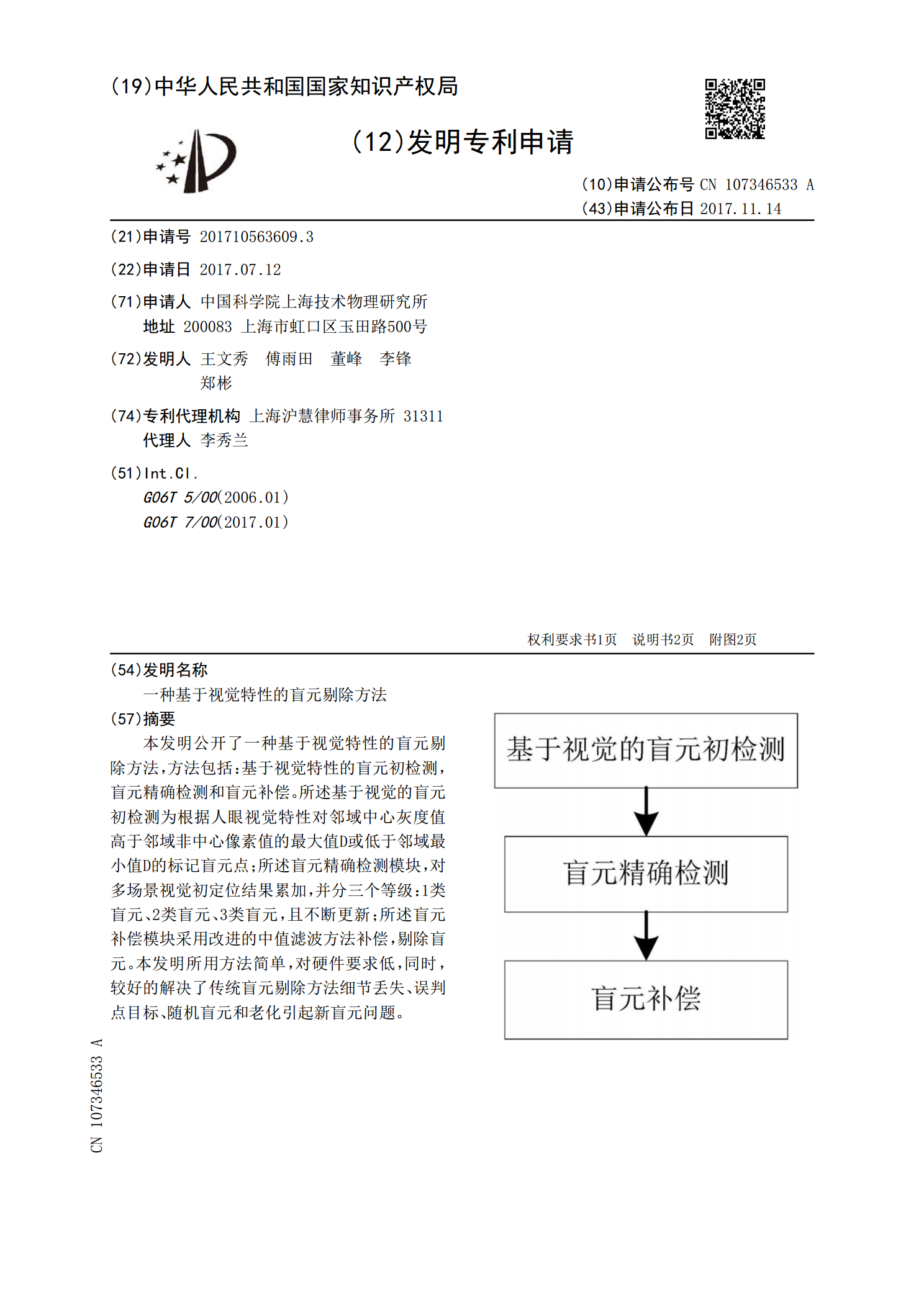
本发明公开了一种基于视觉特性的盲元剔除方法,方法包括:基于视觉特性的盲元初检测,盲元精确检测和盲元补偿。所述基于视觉的盲元初检测为根据人眼视觉特性对邻域中心灰度值高于邻域非中心像素值的最大值D或低于邻域最小值D的标记盲元点;所述盲元精确检测模块,对多场景视觉初定位结果累加,并分三个等级:1类盲元、2类盲元、3类盲元,且不断更新;所述盲元补偿模块采用改进的中值滤波方法补偿,剔除盲元。本发明所用方法简单,对硬件要求低,同时,较好的解决了传统盲元剔除方法细节丢失、误判点目标、随机盲元和老化引起新盲元问题。
一种基于视觉注意特性的视-听觉转换导盲方法.pdf
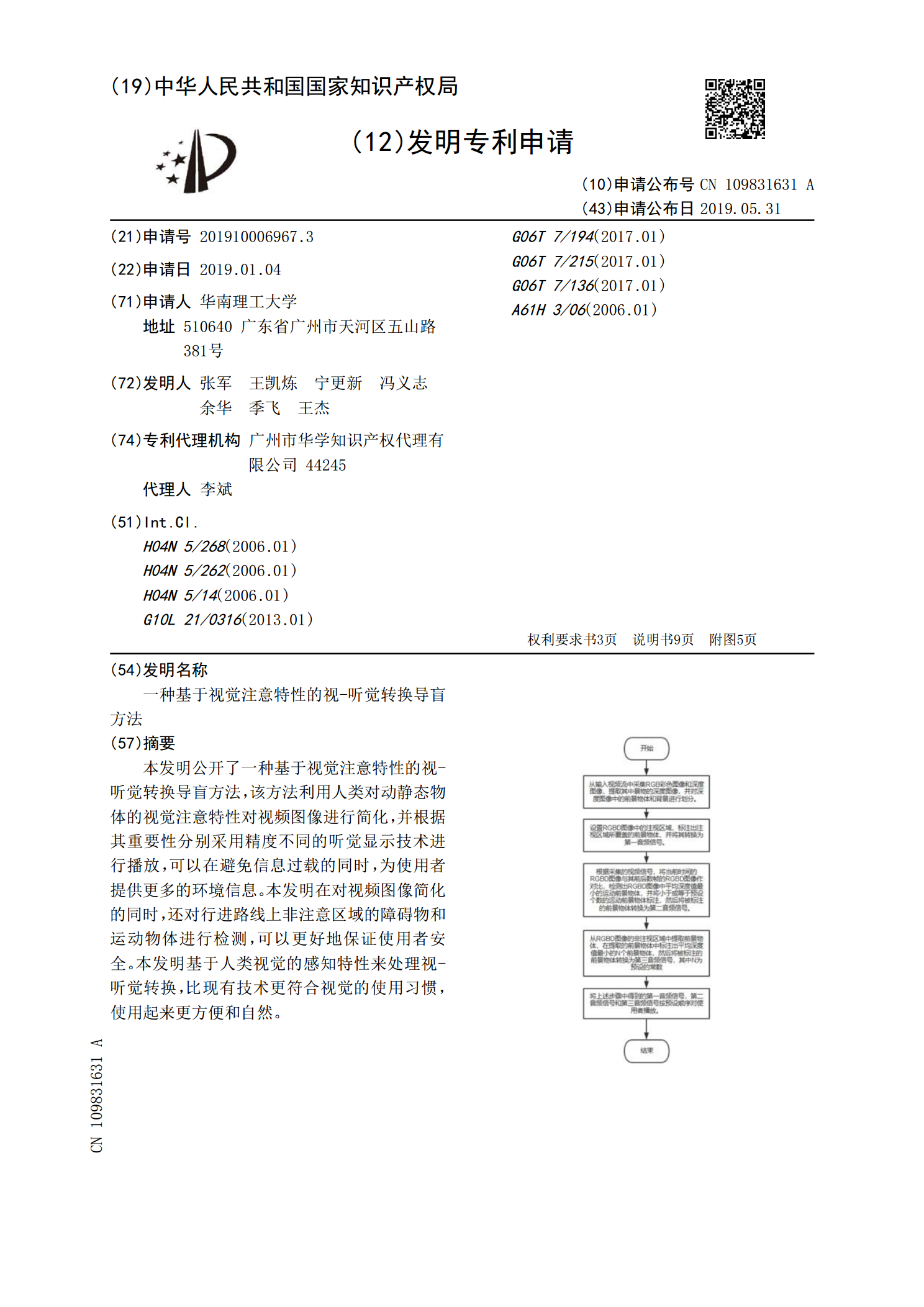
本发明公开了一种基于视觉注意特性的视‑听觉转换导盲方法,该方法利用人类对动静态物体的视觉注意特性对视频图像进行简化,并根据其重要性分别采用精度不同的听觉显示技术进行播放,可以在避免信息过载的同时,为使用者提供更多的环境信息。本发明在对视频图像简化的同时,还对行进路线上非注意区域的障碍物和运动物体进行检测,可以更好地保证使用者安全。本发明基于人类视觉的感知特性来处理视‑听觉转换,比现有技术更符合视觉的使用习惯,使用起来更方便和自然。

一种基于激光视觉剔除不良工件的方法及系统.pdf
本发明公开了一种基于激光视觉剔除不良工件的方法及系统,其方法包括:向沿着标定板输送的若干个被测工件进行在线激光视觉检测,并获取若干个被测工件中每一被测工件的平整度信息;根据每一被测工件的平整度信息为被测工件进行打码标识处理,生成被测工件的二维码信息;剔除机构识别每一被测工件的二维码信息,并根据二维码信息中的剔除指令判断每一被测工件是否进行剔除操作;在判断被测工件满足剔除操作时,将不满足平整度要求的被测工件从所述标定板的传送带剔除出去。本发明采用激光扫描三角测量方法进行3D图像数据采集及空间模型构建,找到符
一种基于时空特性的盲闪元检测和补偿方法.pdf
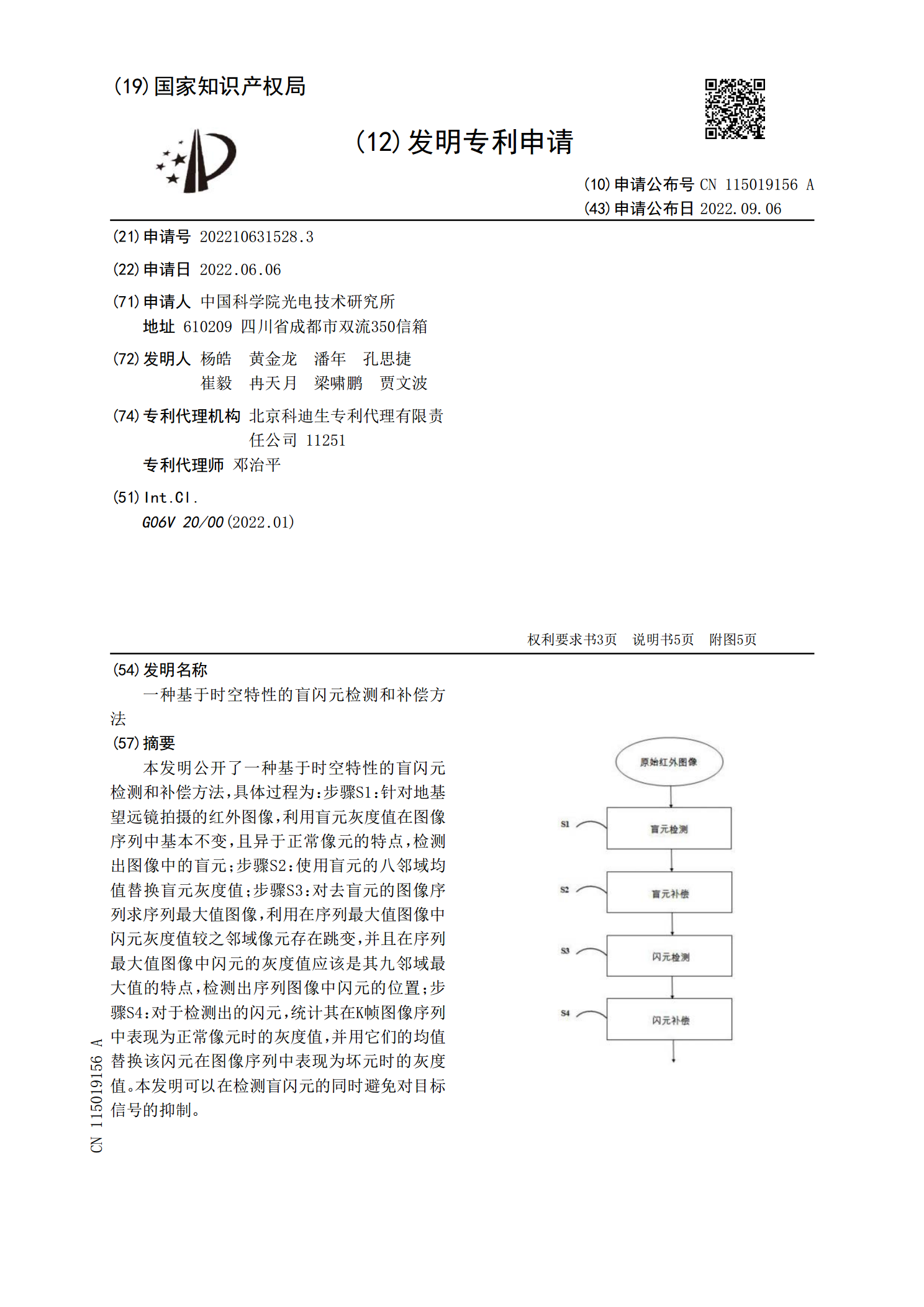
本发明公开了一种基于时空特性的盲闪元检测和补偿方法,具体过程为:步骤S1:针对地基望远镜拍摄的红外图像,利用盲元灰度值在图像序列中基本不变,且异于正常像元的特点,检测出图像中的盲元;步骤S2:使用盲元的八邻域均值替换盲元灰度值;步骤S3:对去盲元的图像序列求序列最大值图像,利用在序列最大值图像中闪元灰度值较之邻域像元存在跳变,并且在序列最大值图像中闪元的灰度值应该是其九邻域最大值的特点,检测出序列图像中闪元的位置;步骤S4:对于检测出的闪元,统计其在K帧图像序列中表现为正常像元时的灰度值,并用它们的均值替
视觉导盲拐杖及基于视觉导盲拐杖的导航方法.pdf
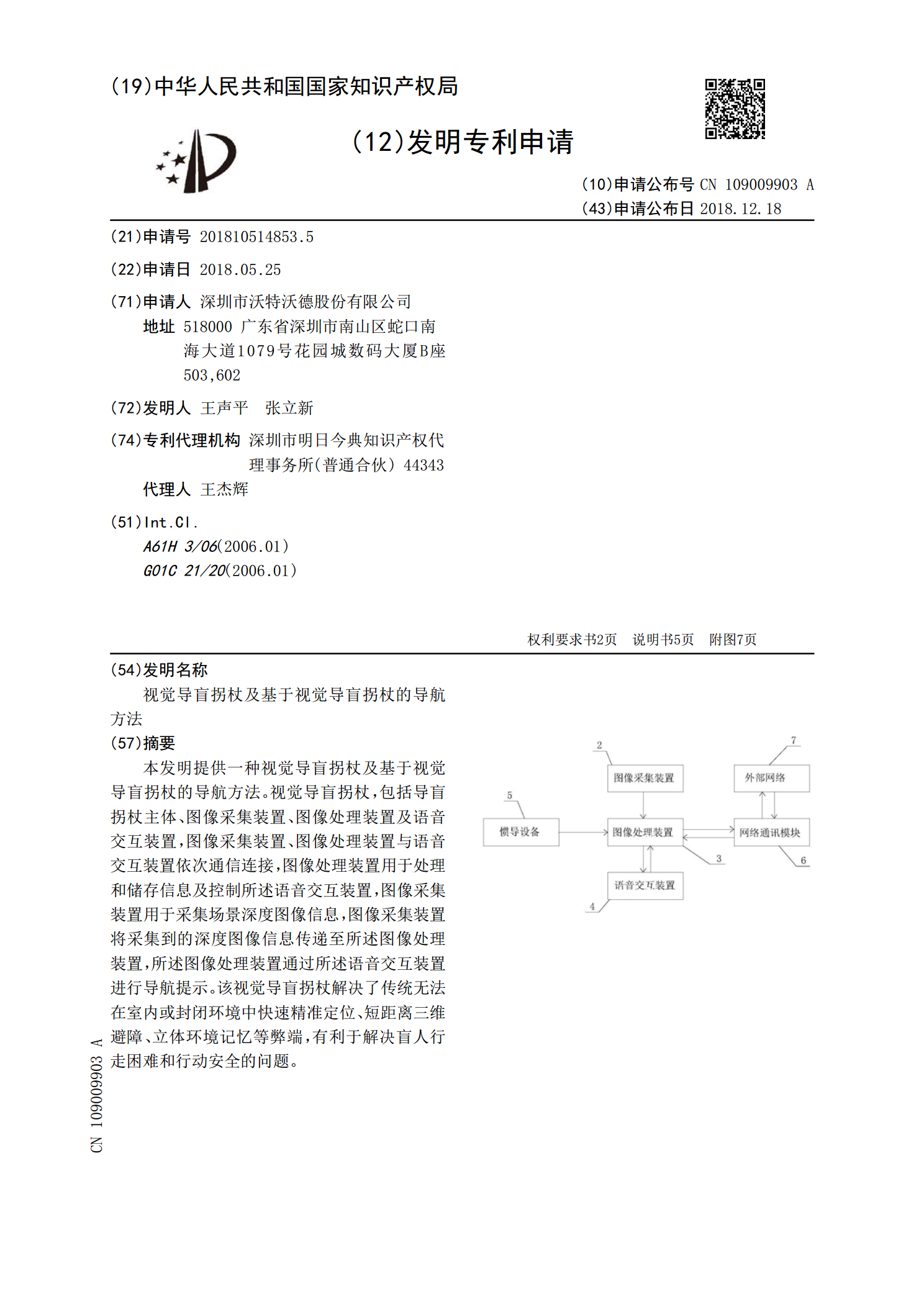
本发明提供一种视觉导盲拐杖及基于视觉导盲拐杖的导航方法。视觉导盲拐杖,包括导盲拐杖主体、图像采集装置、图像处理装置及语音交互装置,图像采集装置、图像处理装置与语音交互装置依次通信连接,图像处理装置用于处理和储存信息及控制所述语音交互装置,图像采集装置用于采集场景深度图像信息,图像采集装置将采集到的深度图像信息传递至所述图像处理装置,所述图像处理装置通过所述语音交互装置进行导航提示。该视觉导盲拐杖解决了传统无法在室内或封闭环境中快速精准定位、短距离三维避障、立体环境记忆等弊端,有利于解决盲人行走困难和行动安