
一种基于机器视觉的工件检测方法及系统.pdf

猫巷****熙柔

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的工件检测方法及系统.pdf
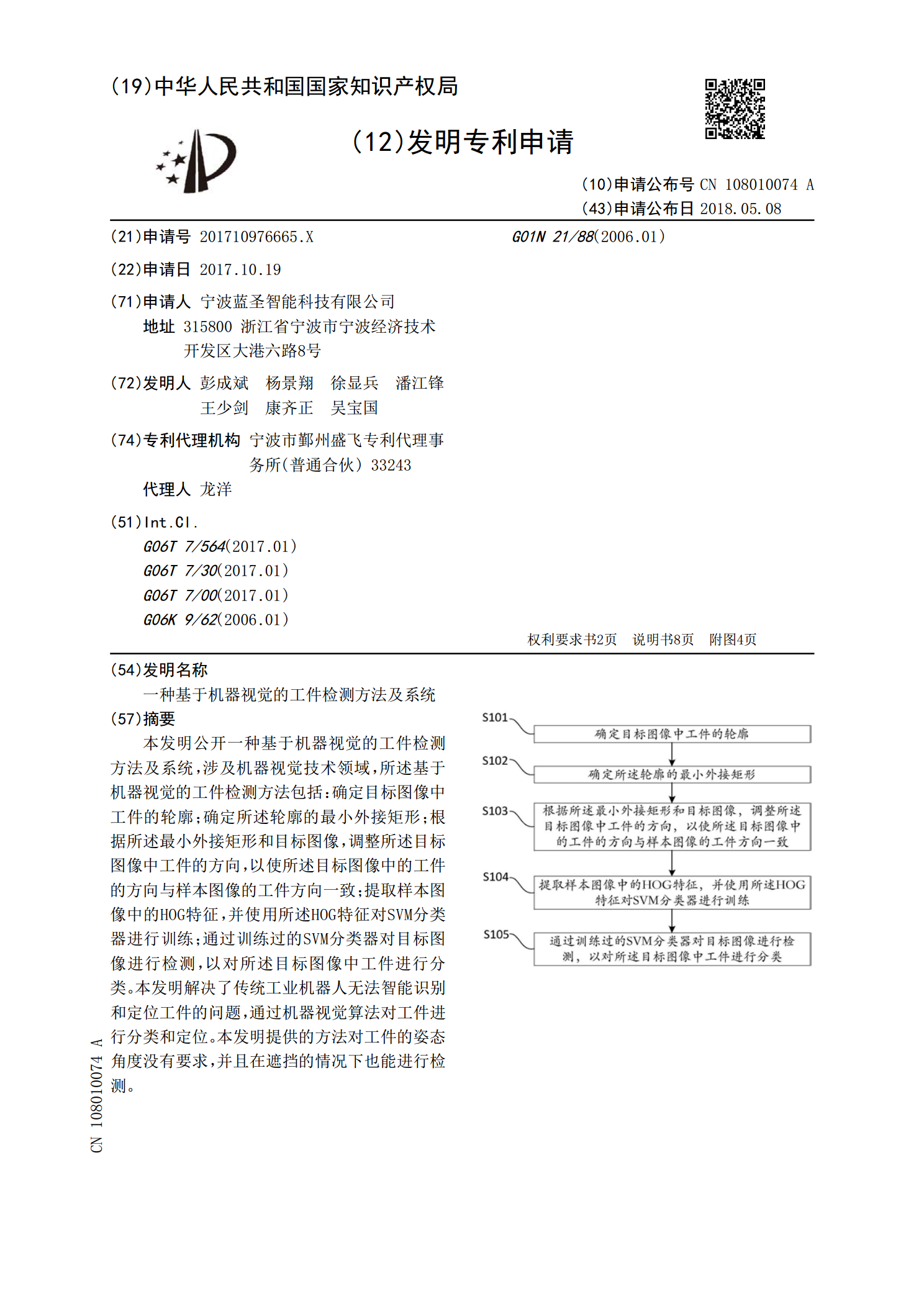
本发明公开一种基于机器视觉的工件检测方法及系统,涉及机器视觉技术领域,所述基于机器视觉的工件检测方法包括:确定目标图像中工件的轮廓;确定所述轮廓的最小外接矩形;根据所述最小外接矩形和目标图像,调整所述目标图像中工件的方向,以使所述目标图像中的工件的方向与样本图像的工件方向一致;提取样本图像中的HOG特征,并使用所述HOG特征对SVM分类器进行训练;通过训练过的SVM分类器对目标图像进行检测,以对所述目标图像中工件进行分类。本发明解决了传统工业机器人无法智能识别和定位工件的问题,通过机器视觉算法对工件进行分

基于机器视觉的工件缺陷检测方法.pdf
本发明提供了一种基于机器视觉的工件缺陷检测方法。该方法首先采集法兰盘式工件的图像,对相机进行标定,获取标定误差,然后对工件轮廓进行亚像素边缘信息的提取,计算出拟合边缘到工件轮廓的距离,并通过比较该距离是否大于所给阈值判别工件外轮廓的破损情况,最后针对工件表面纹理复杂影响工件表面划痕与锈蚀分割的问题,采用基于像素分层采样的PixelNet卷积神经网络对表面缺陷进行分割。结果表明,本发明可以准确地检测出工件的外形缺陷和表面缺陷,并提高了算法鲁棒性。
基于机器视觉的工件几何尺寸自动化检测方法及系统.pdf
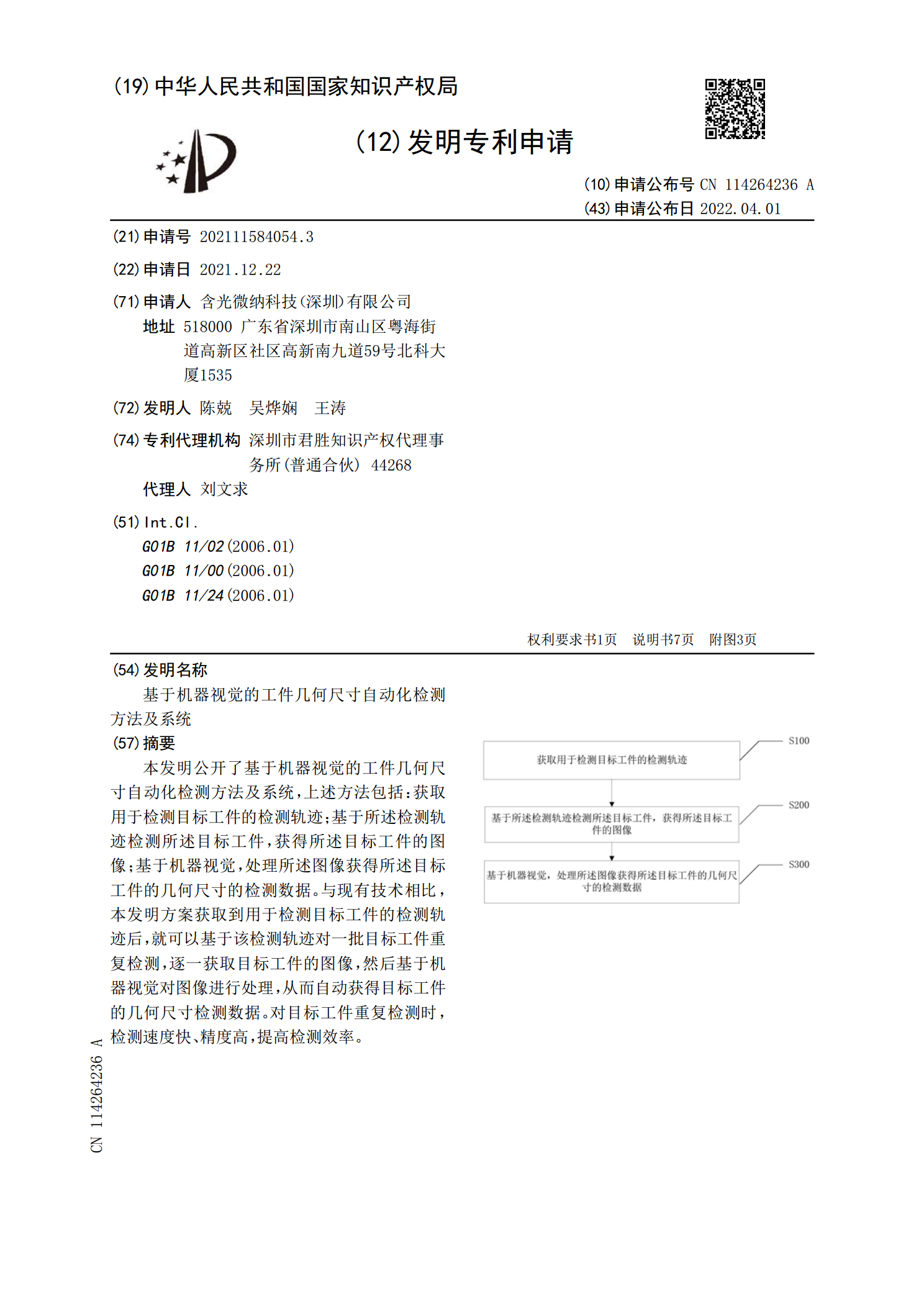
本发明公开了基于机器视觉的工件几何尺寸自动化检测方法及系统,上述方法包括:获取用于检测目标工件的检测轨迹;基于所述检测轨迹检测所述目标工件,获得所述目标工件的图像;基于机器视觉,处理所述图像获得所述目标工件的几何尺寸的检测数据。与现有技术相比,本发明方案获取到用于检测目标工件的检测轨迹后,就可以基于该检测轨迹对一批目标工件重复检测,逐一获取目标工件的图像,然后基于机器视觉对图像进行处理,从而自动获得目标工件的几何尺寸检测数据。对目标工件重复检测时,检测速度快、精度高,提高检测效率。
一种基于机器视觉的工件抓取方法.pdf
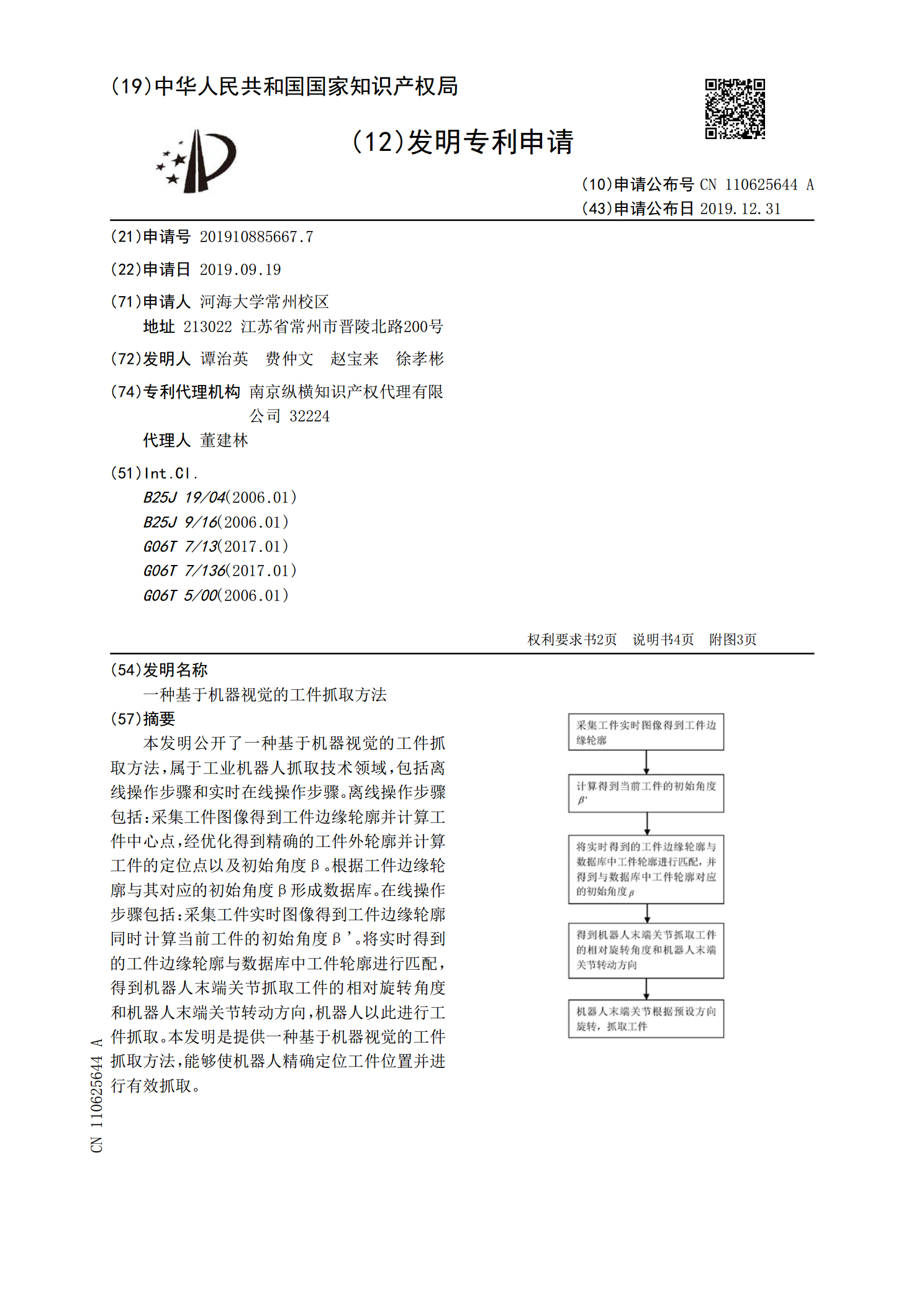
本发明公开了一种基于机器视觉的工件抓取方法,属于工业机器人抓取技术领域,包括离线操作步骤和实时在线操作步骤。离线操作步骤包括:采集工件图像得到工件边缘轮廓并计算工件中心点,经优化得到精确的工件外轮廓并计算工件的定位点以及初始角度β。根据工件边缘轮廓与其对应的初始角度β形成数据库。在线操作步骤包括:采集工件实时图像得到工件边缘轮廓同时计算当前工件的初始角度β'。将实时得到的工件边缘轮廓与数据库中工件轮廓进行匹配,得到机器人末端关节抓取工件的相对旋转角度和机器人末端关节转动方向,机器人以此进行工件抓取。本发明

基于机器视觉的工件的在线检测.docx
基于机器视觉的工件的在线检测基于机器视觉的工件的在线检测摘要:随着制造业的发展和智能化的推进,工件的在线检测成为了一个重要的环节。传统的人工检测方法存在效率低、成本高、易出错等问题,而基于机器视觉的工件在线检测可以有效地提高检测效率和准确性。本论文将介绍机器视觉技术在工件在线检测中的应用,包括图像获取与预处理、特征提取与选择、检测算法和结果评估等方面的内容。关键词:机器视觉、工件检测、图像处理、特征提取、检测算法一、引言工件的在线检测是制造业中的一项重要任务,它可以提前发现生产过程中可能存在的问题,从而减