
磁锚定机器人系统.pdf

雨巷****彦峰

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
磁锚定机器人系统.pdf
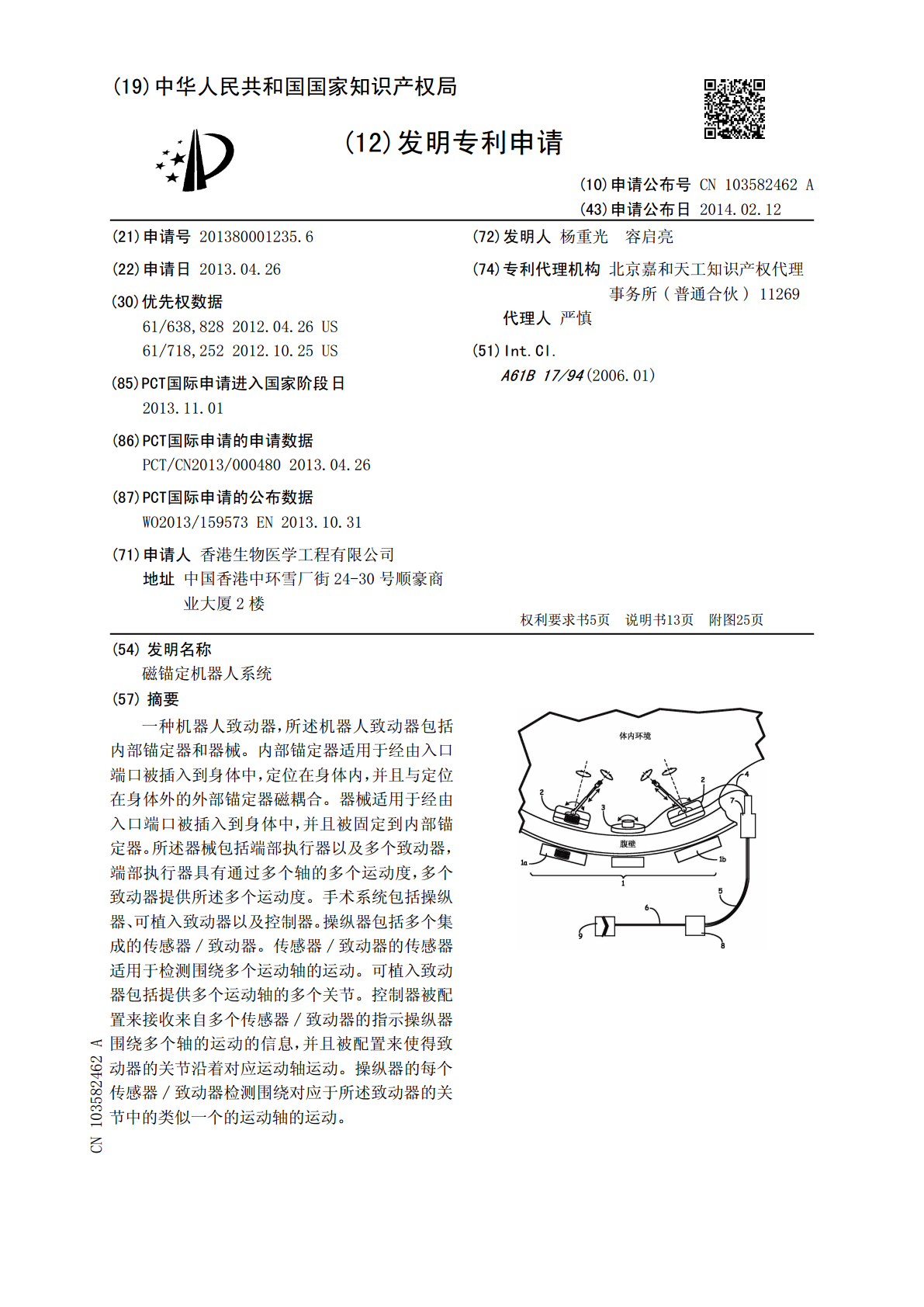
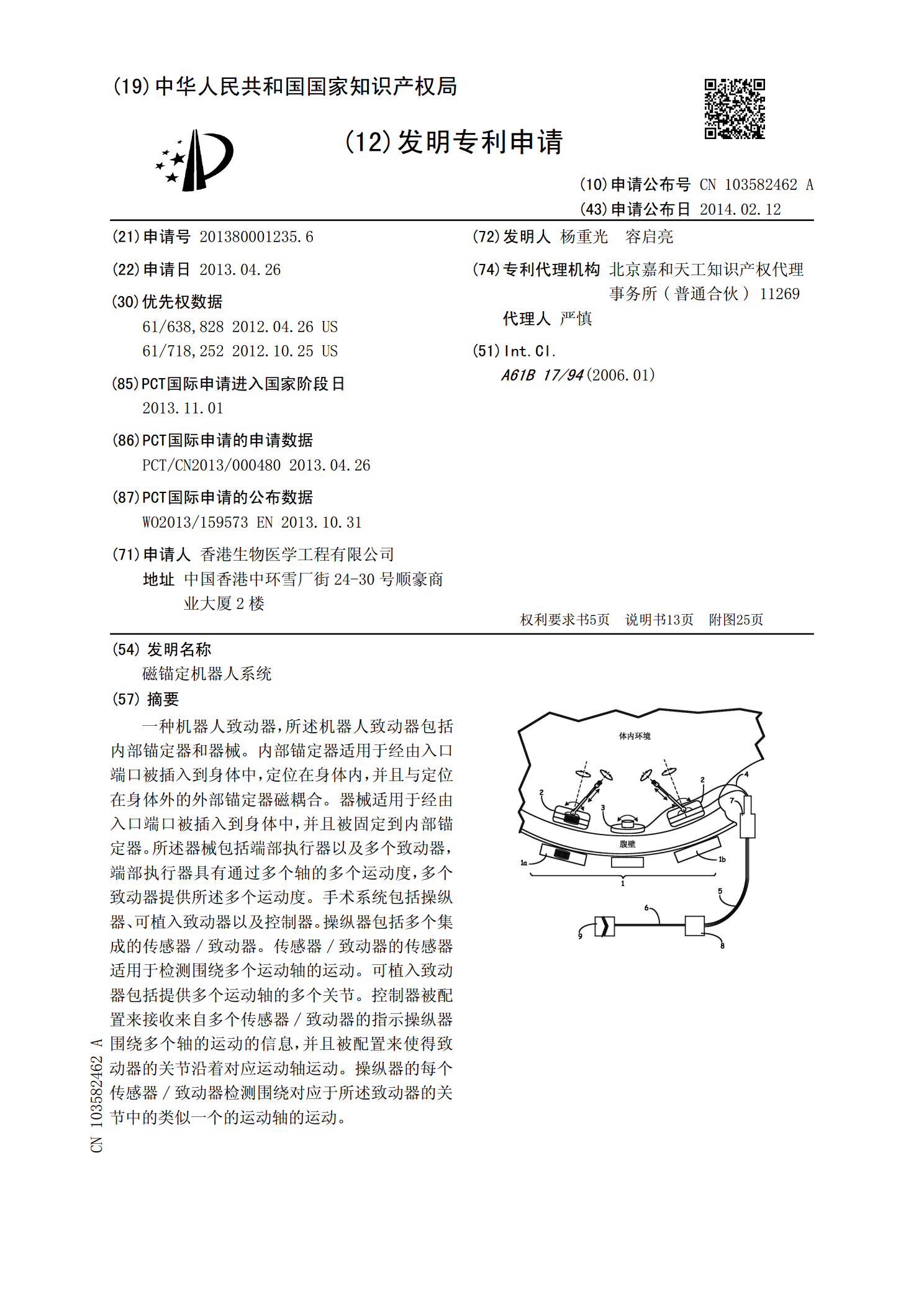
一种机器人致动器,所述机器人致动器包括内部锚定器和器械。内部锚定器适用于经由入口端口被插入到身体中,定位在身体内,并且与定位在身体外的外部锚定器磁耦合。器械适用于经由入口端口被插入到身体中,并且被固定到内部锚定器。所述器械包括端部执行器以及多个致动器,端部执行器具有通过多个轴的多个运动度,多个致动器提供所述多个运动度。手术系统包括操纵器、可植入致动器以及控制器。操纵器包括多个集成的传感器/致动器。传感器/致动器的传感器适用于检测围绕多个运动轴的运动。可植入致动器包括提供多个运动轴的多个关节。控制器被配置来

无线可充电腹腔内磁锚定视觉手术机器人.pdf
无线可充电腹腔内磁锚定视觉手术机器人,它涉及一种视觉机器人,以解决现有腹腔镜技术通过内窥镜导诊,工作劳动强度大,以及内窥镜视野的范围调整困难,内窥镜还会与手术器械有一定干扰,增加手术难度的问题,它包括壳体、清洁基体和三段轴结构,它还包括悬挂支架、电机、阻尼器、曲柄滑块机构、摄像头模块、无线收发模块、中枢控制电路模块、两个永磁铁、两套可充电电池组、两个固定轴和多个LED灯;曲柄滑块机构包括驱动轴、曲柄、连杆、滑块、连接杆、导轨、冠状齿轮、直齿轮、第一圆柱齿轮和第二圆柱齿轮。本发明用于腹腔微创手术。

可更换电刀的腹腔内磁锚定电刀机器人.pdf
可更换电刀的腹腔内磁锚定电刀机器人,它涉及一种用于腹腔镜微创手术中的器械,以解决现有腹腔内微创手术中医务人员操作手术器械,灵活性差,劳动强度大,容易产生疲劳,影响手术质量的问题,它包括机械结构单元和电控单元;机械结构单元包括壳体、第一蜗杆、第二蜗杆、蜗轮、齿条、永磁铁和悬挂基座;电控单元包括第一电机、第二电机、控制电路模块和无线收发模块;壳体的内侧壁上镶嵌有控制电路模块和无线收发模块,壳体内布置有第一蜗杆、第二蜗杆、蜗轮、齿条、第一电机和第二电机;齿条滑动安装在壳体内,第一蜗杆与齿条啮合,第二蜗杆与蜗轮啮

用于微创手术的腹腔内磁锚定夹持手术机器人.pdf
用于微创手术的腹腔内磁锚定夹持手术机器人,它涉及一种用于微创手术的机器人,以解决现有腹腔微创手术过程中,手术医生直接手持手术器械操作影响手术的精度和质量,以及现有手术机器人成本高、占用体积大,移动自由性较差的问题,它包括机械结构单元和电控单元;机械结构单元包括壳体、第一蜗杆、第二蜗杆、蜗轮、齿条、永磁铁、悬挂基座和夹持机构;夹持机构包括第三电机、丝杠副、第一连杆、第二连杆、第三连杆和钳子;电控单元包括第一电机、第二电机、控制电路模块和无线收发模块;壳体的内侧壁上镶嵌有控制电路模块和无线收发模块,壳体内布置
一种基于磁锚定导向系统的肺组织牵拉装置系统.pdf
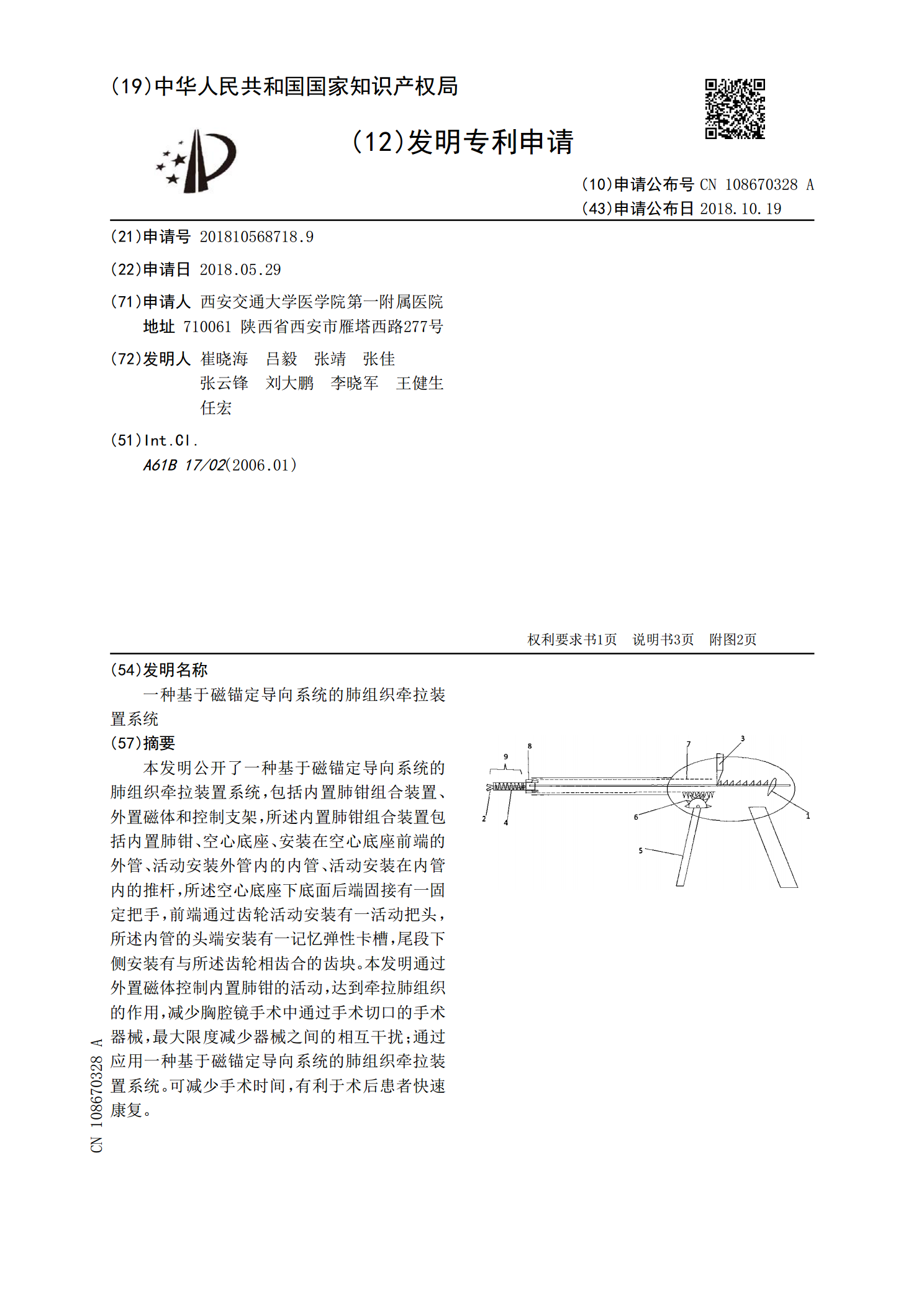
本发明公开了一种基于磁锚定导向系统的肺组织牵拉装置系统,包括内置肺钳组合装置、外置磁体和控制支架,所述内置肺钳组合装置包括内置肺钳、空心底座、安装在空心底座前端的外管、活动安装外管内的内管、活动安装在内管内的推杆,所述空心底座下底面后端固接有一固定把手,前端通过齿轮活动安装有一活动把头,所述内管的头端安装有一记忆弹性卡槽,尾段下侧安装有与所述齿轮相齿合的齿块。本发明通过外置磁体控制内置肺钳的活动,达到牵拉肺组织的作用,减少胸腔镜手术中通过手术切口的手术器械,最大限度减少器械之间的相互干扰;通过应用一种基于