
一种基于磁锚定导向系统的肺组织牵拉装置系统.pdf

念珊****写意

1/7

2/7

3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于磁锚定导向系统的肺组织牵拉装置系统.pdf
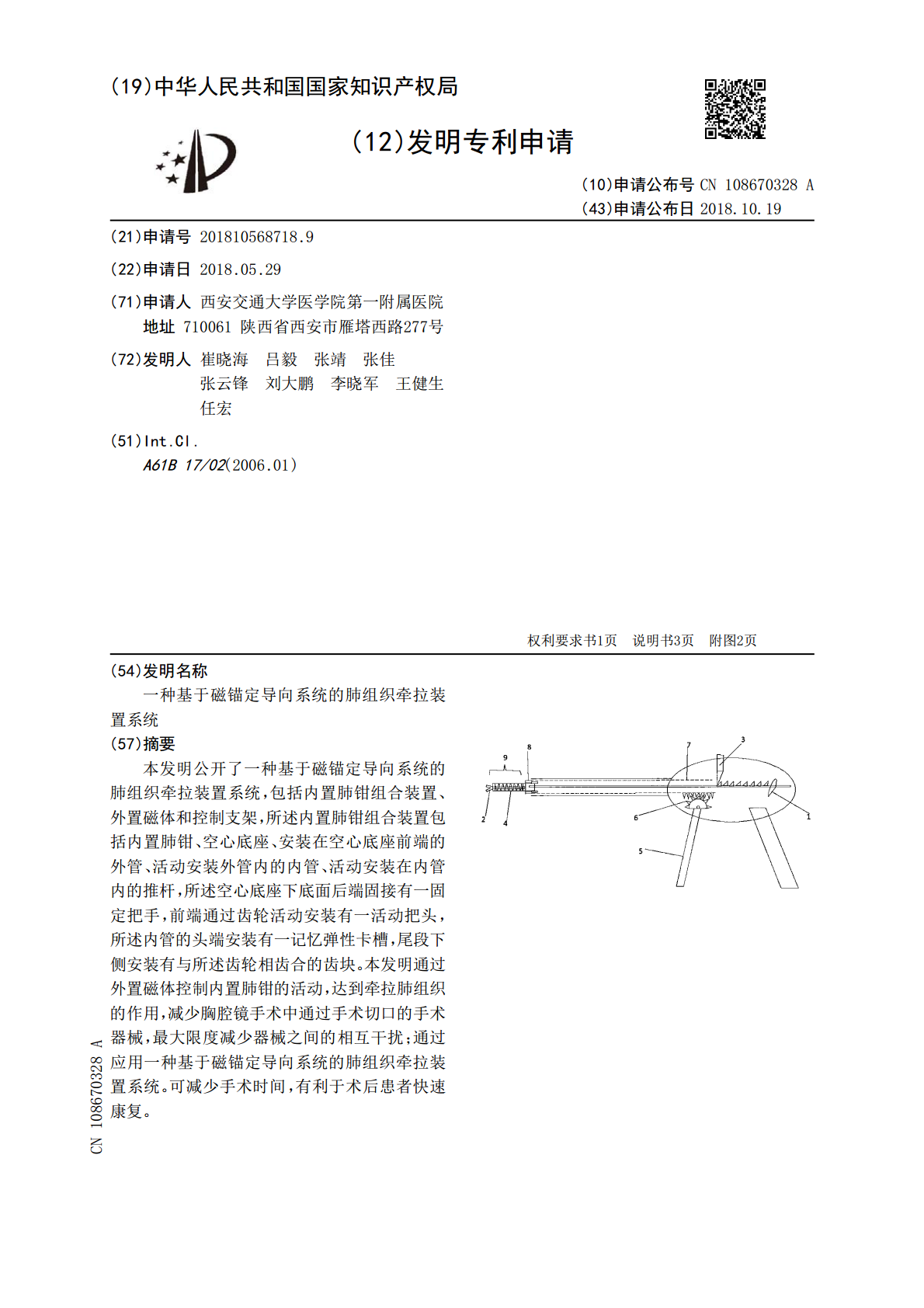
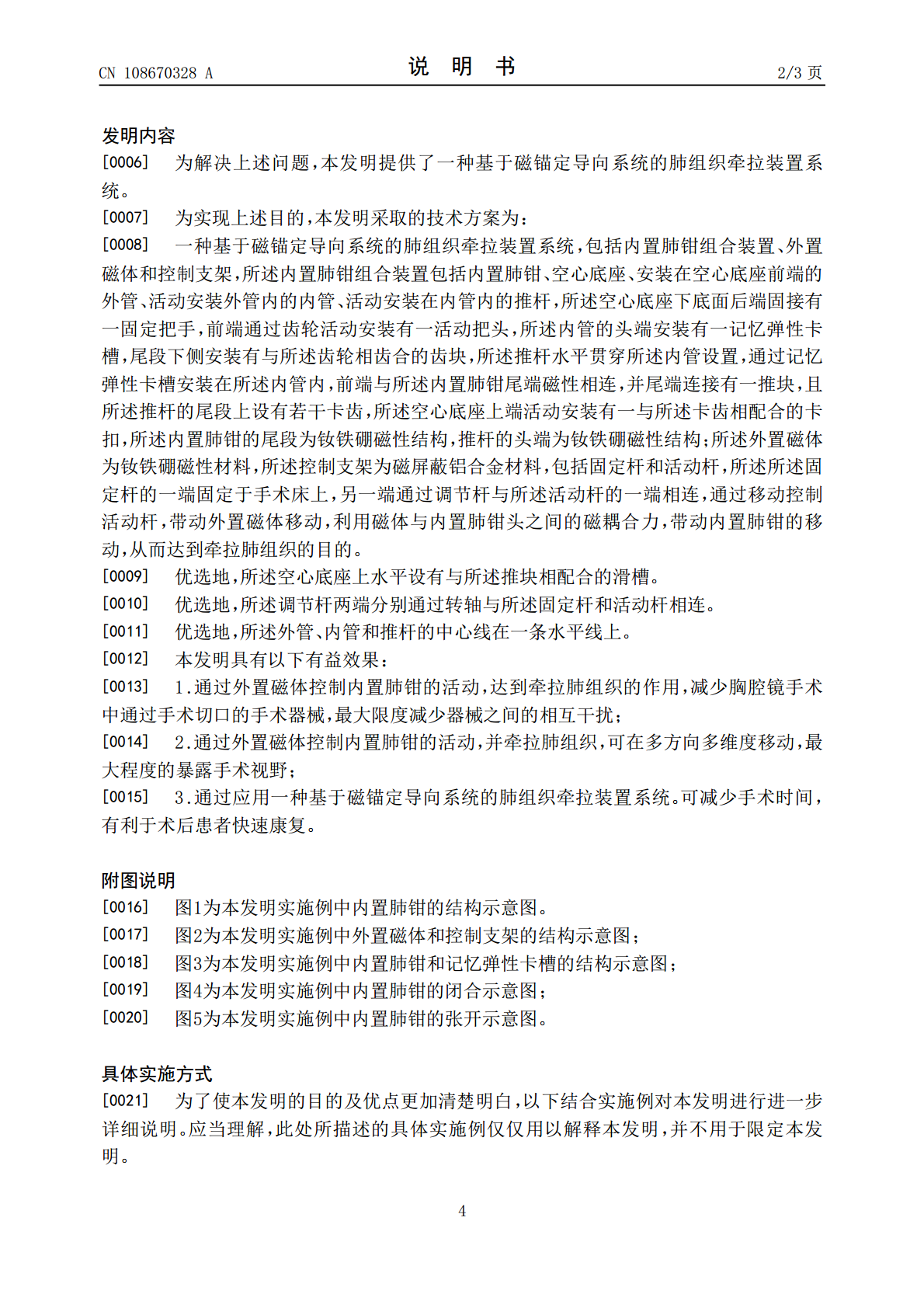
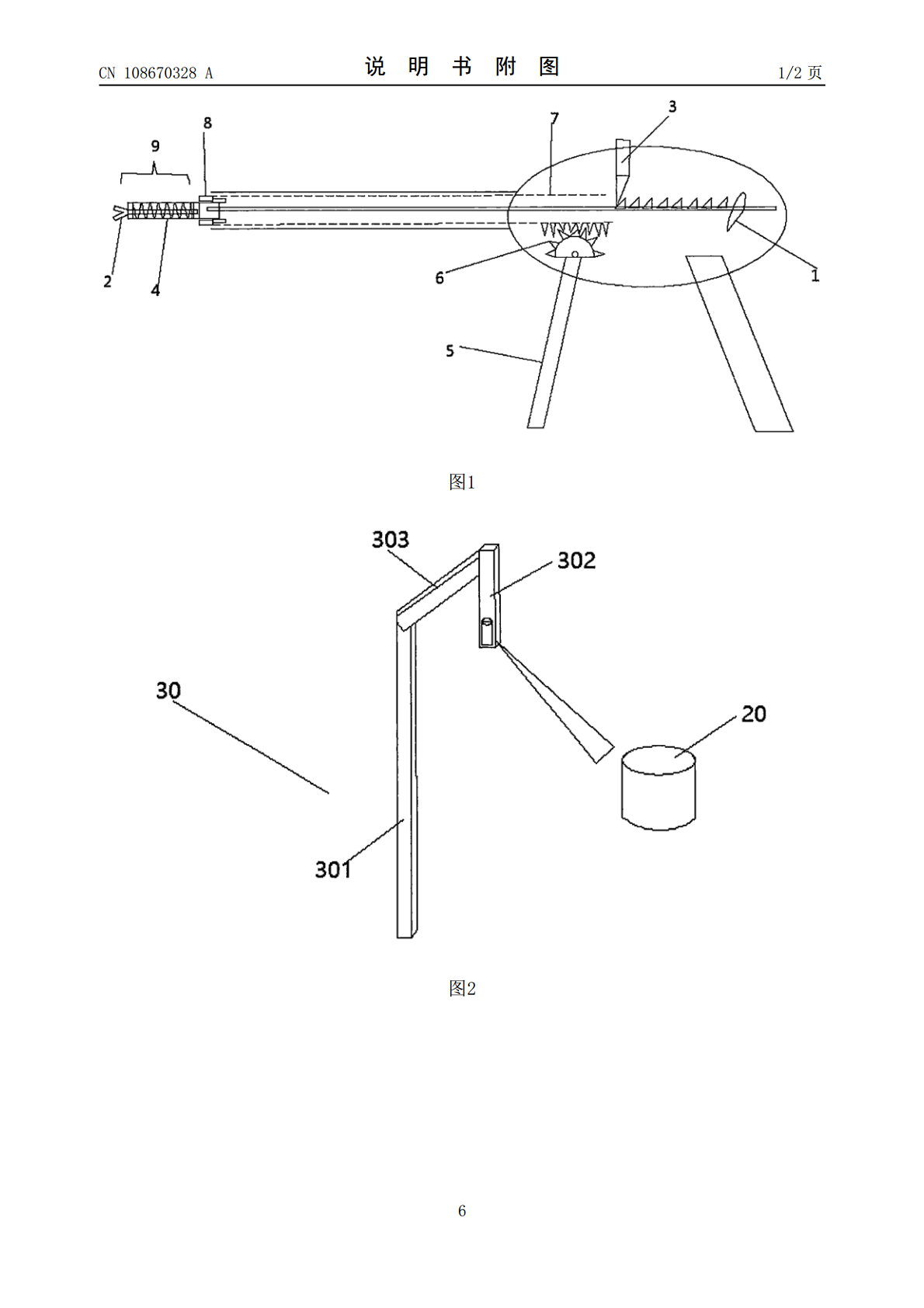
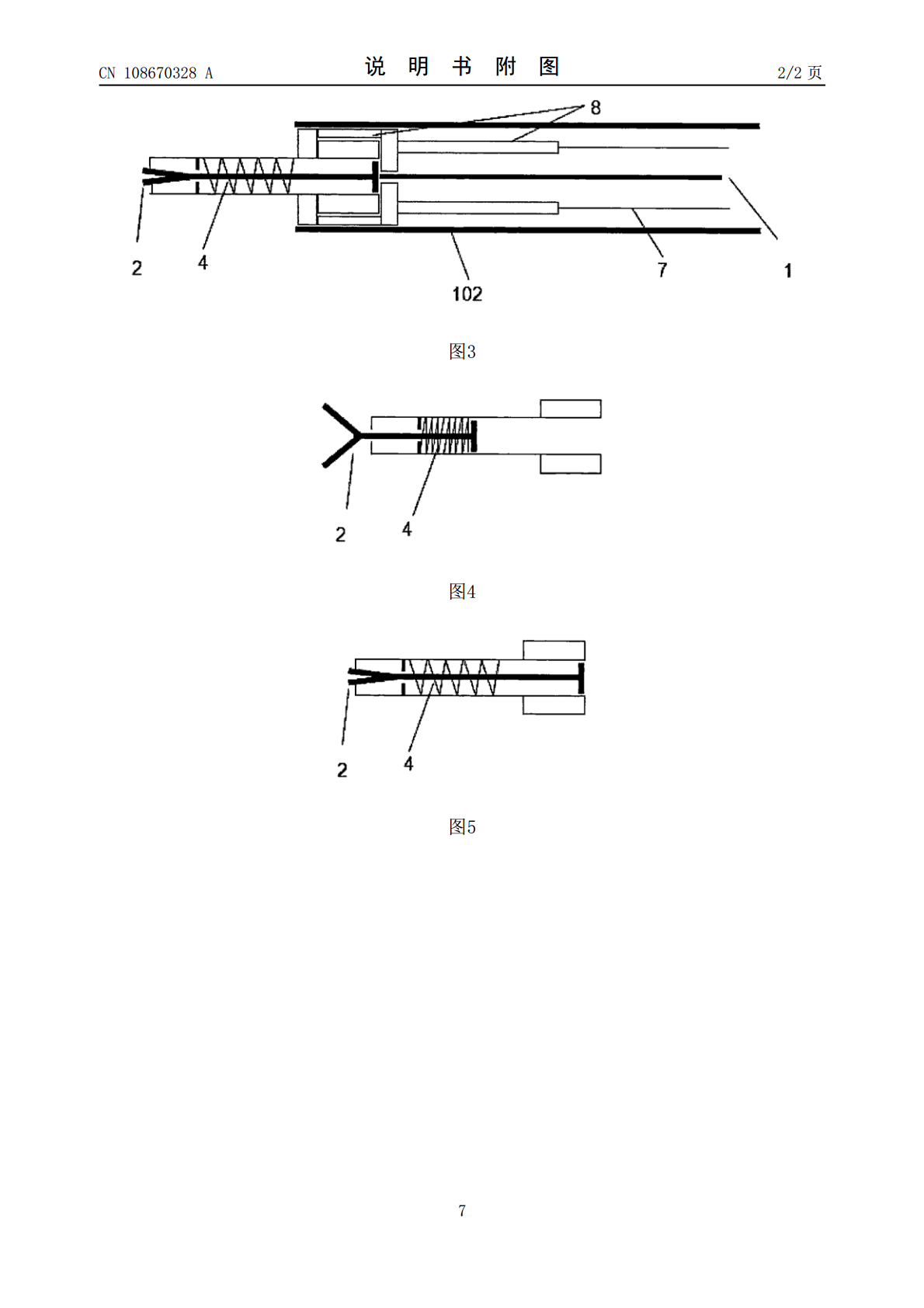
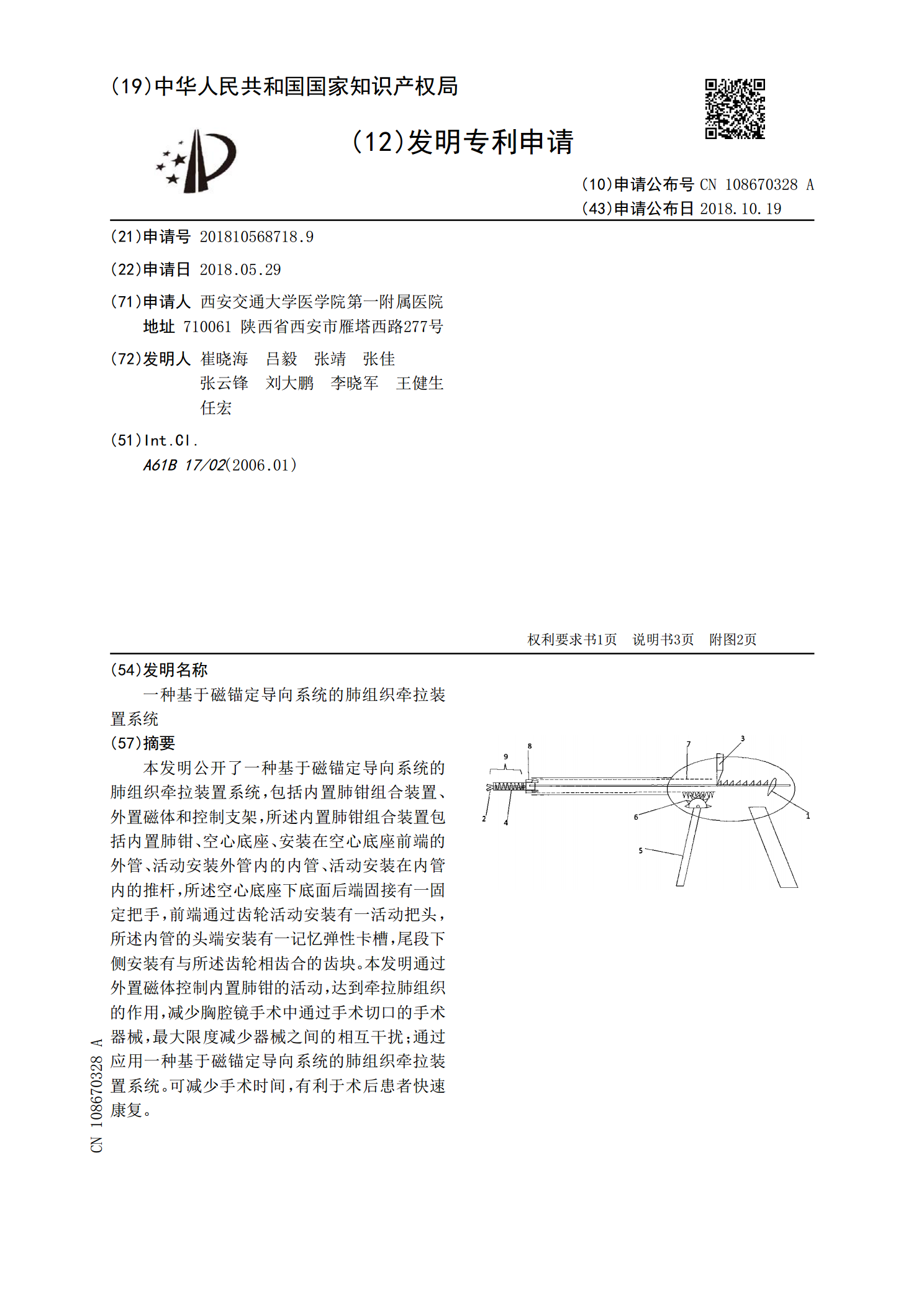
本发明公开了一种基于磁锚定导向系统的肺组织牵拉装置系统,包括内置肺钳组合装置、外置磁体和控制支架,所述内置肺钳组合装置包括内置肺钳、空心底座、安装在空心底座前端的外管、活动安装外管内的内管、活动安装在内管内的推杆,所述空心底座下底面后端固接有一固定把手,前端通过齿轮活动安装有一活动把头,所述内管的头端安装有一记忆弹性卡槽,尾段下侧安装有与所述齿轮相齿合的齿块。本发明通过外置磁体控制内置肺钳的活动,达到牵拉肺组织的作用,减少胸腔镜手术中通过手术切口的手术器械,最大限度减少器械之间的相互干扰;通过应用一种基于
基于磁导向的增强型地热系统构建方法及装置.pdf
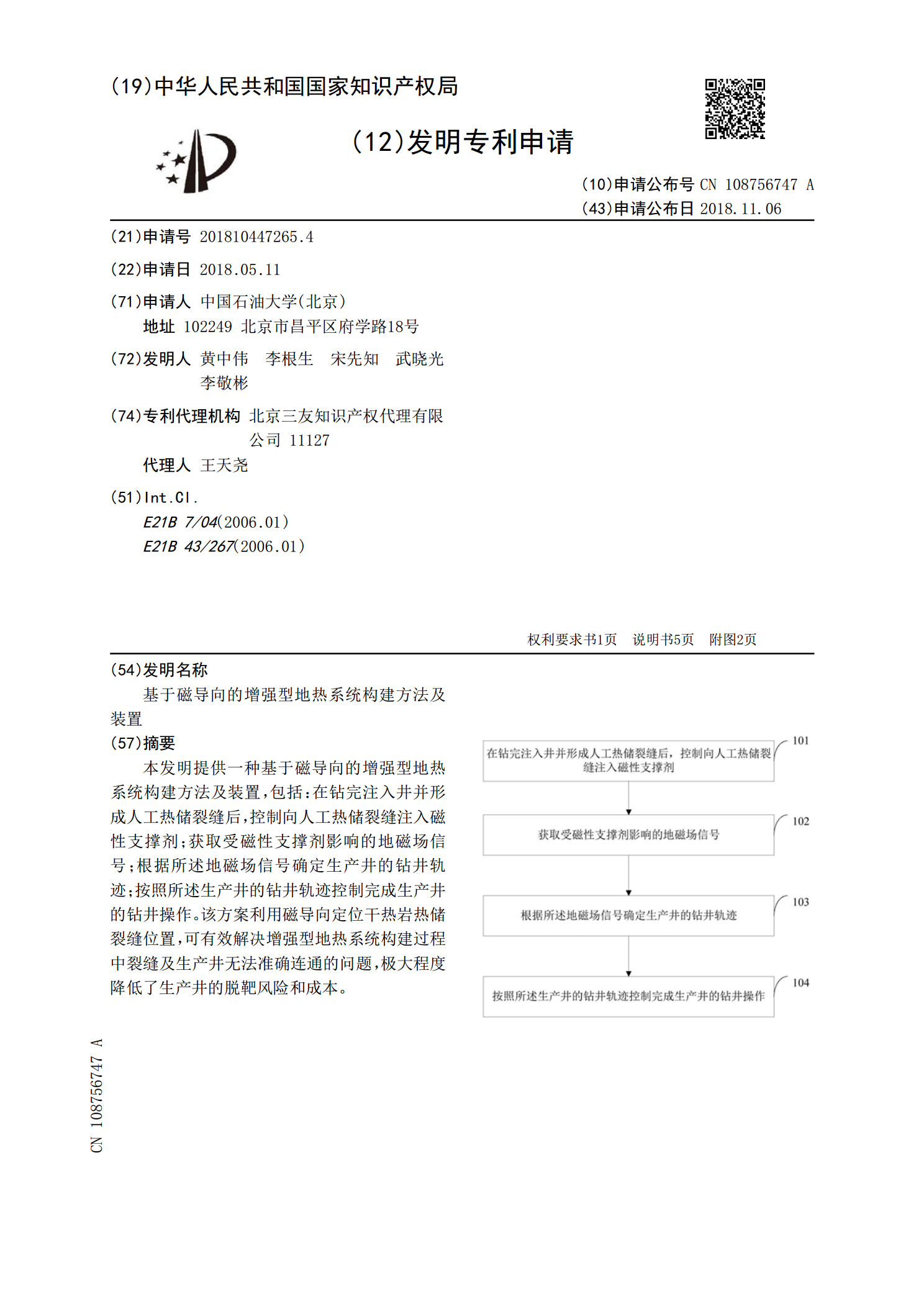
本发明提供一种基于磁导向的增强型地热系统构建方法及装置,包括:在钻完注入井并形成人工热储裂缝后,控制向人工热储裂缝注入磁性支撑剂;获取受磁性支撑剂影响的地磁场信号;根据所述地磁场信号确定生产井的钻井轨迹;按照所述生产井的钻井轨迹控制完成生产井的钻井操作。该方案利用磁导向定位干热岩热储裂缝位置,可有效解决增强型地热系统构建过程中裂缝及生产井无法准确连通的问题,极大程度降低了生产井的脱靶风险和成本。
磁锚定机器人系统.pdf
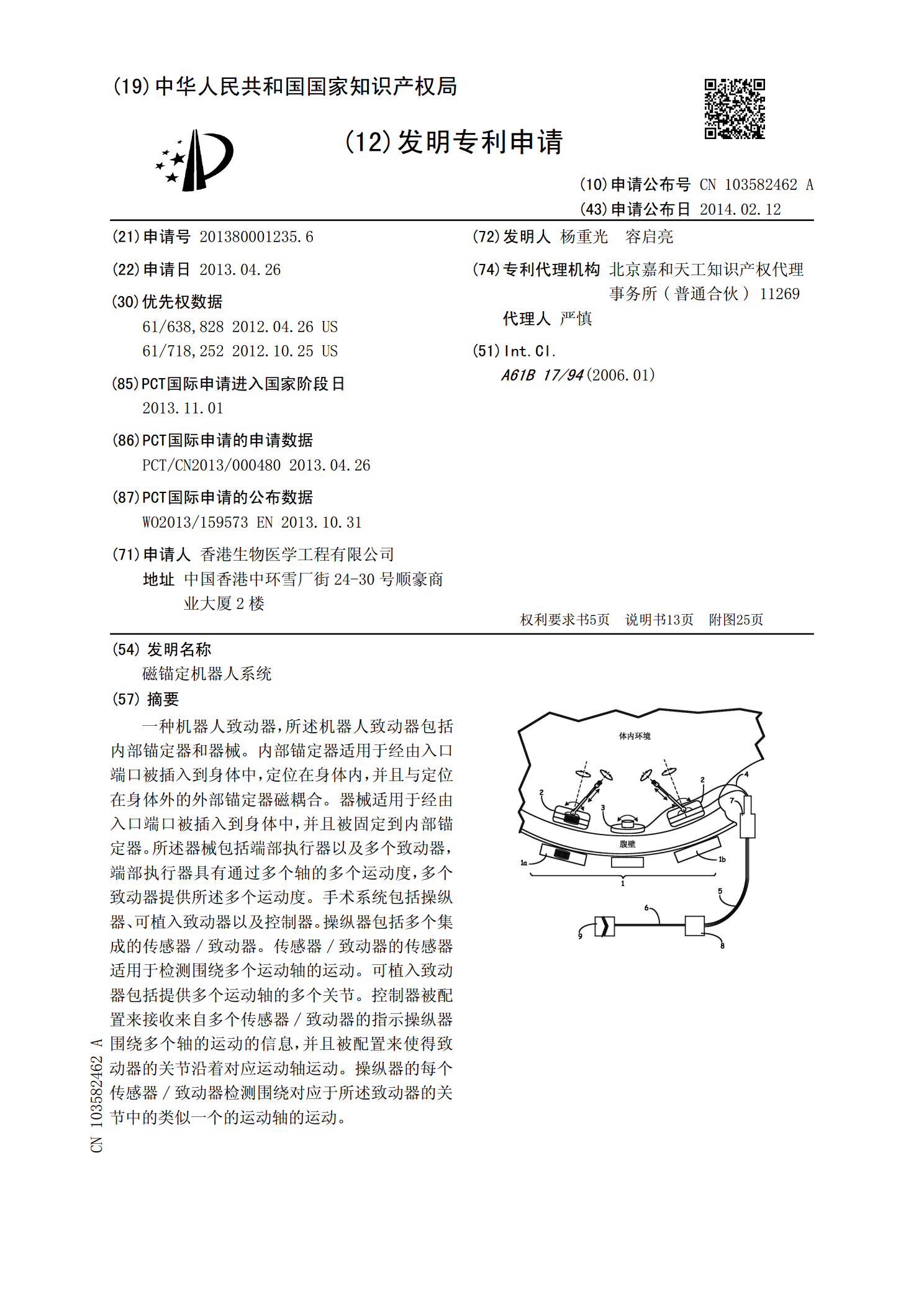
一种机器人致动器,所述机器人致动器包括内部锚定器和器械。内部锚定器适用于经由入口端口被插入到身体中,定位在身体内,并且与定位在身体外的外部锚定器磁耦合。器械适用于经由入口端口被插入到身体中,并且被固定到内部锚定器。所述器械包括端部执行器以及多个致动器,端部执行器具有通过多个轴的多个运动度,多个致动器提供所述多个运动度。手术系统包括操纵器、可植入致动器以及控制器。操纵器包括多个集成的传感器/致动器。传感器/致动器的传感器适用于检测围绕多个运动轴的运动。可植入致动器包括提供多个运动轴的多个关节。控制器被配置来
一种基于WMS系统的仓库导向定位装置.pdf
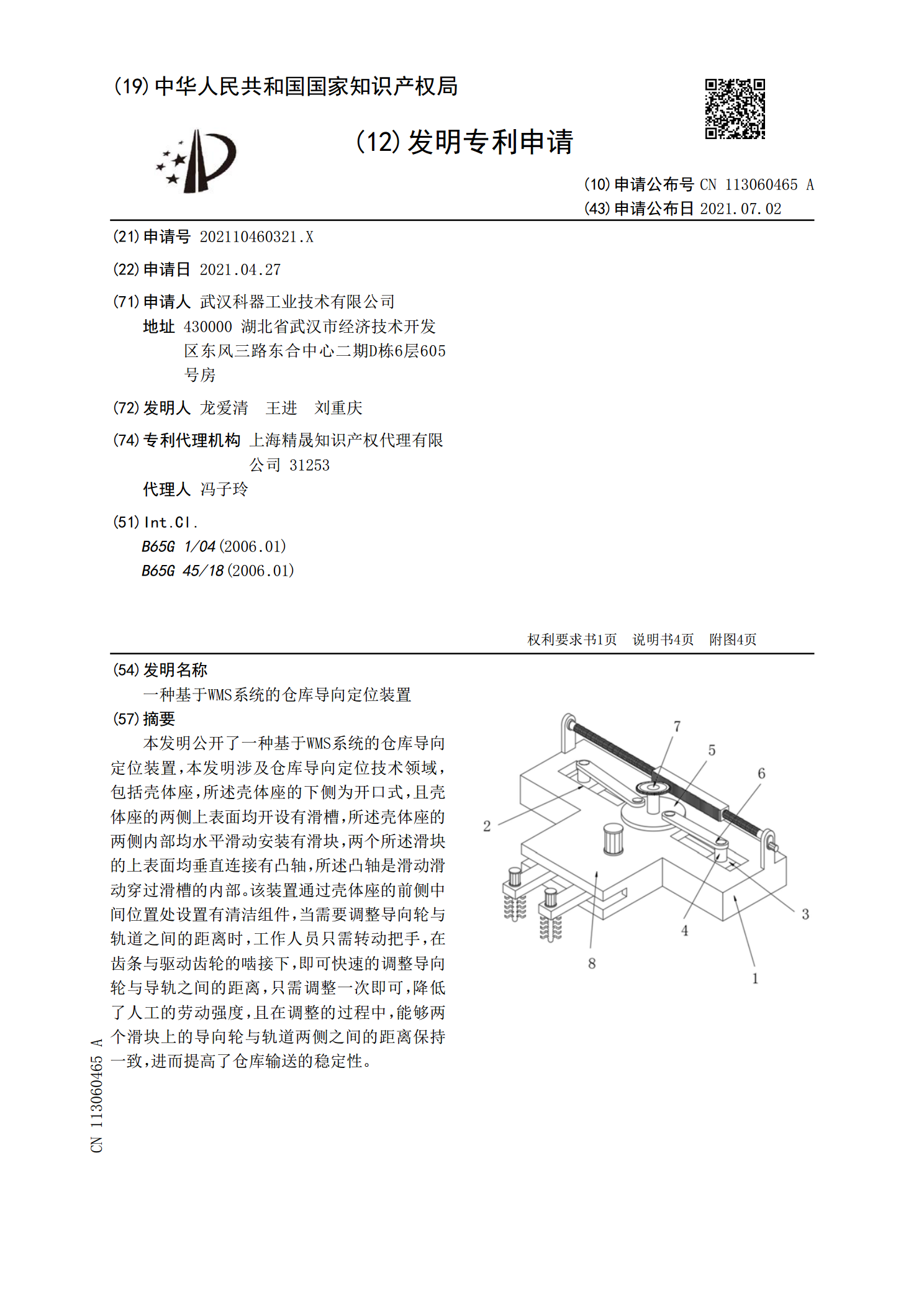
本发明公开了一种基于WMS系统的仓库导向定位装置,本发明涉及仓库导向定位技术领域,包括壳体座,所述壳体座的下侧为开口式,且壳体座的两侧上表面均开设有滑槽,所述壳体座的两侧内部均水平滑动安装有滑块,两个所述滑块的上表面均垂直连接有凸轴,所述凸轴是滑动滑动穿过滑槽的内部。该装置通过壳体座的前侧中间位置处设置有清洁组件,当需要调整导向轮与轨道之间的距离时,工作人员只需转动把手,在齿条与驱动齿轮的啮接下,即可快速的调整导向轮与导轨之间的距离,只需调整一次即可,降低了人工的劳动强度,且在调整的过程中,能够两个滑块上

基于磁锚定系统的电磁控制腹腔镜手术内置抓钳离合系统的设计.docx
基于磁锚定系统的电磁控制腹腔镜手术内置抓钳离合系统的设计随着医学科技的发展,腹腔镜手术已成为常见的微创手术。其中,手术内置抓钳离合系统是其绝对的关键部分。本文将针对这一问题,基于磁锚定系统,探讨一种新的设计方案。一、方案设计1.1、磁锚定系统原理简介磁锚定系统是一种通过电流产生磁场,从而实现磁力作用的物理现象。利用这种现象,可以通过外部控制电磁铁的电流,从而实现离合系统的控制。1.2、方案具体实施方案本设计方案将采用磁锚定系统控制抓钳的离合。通过将磁铁固定在腹腔镜内部,通过电流来控制抓钳的运动。具体实施时