
一种动态环境下的基于流场的轨迹规划方法.pdf

Jo****34


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种动态环境下的基于流场的轨迹规划方法.pdf
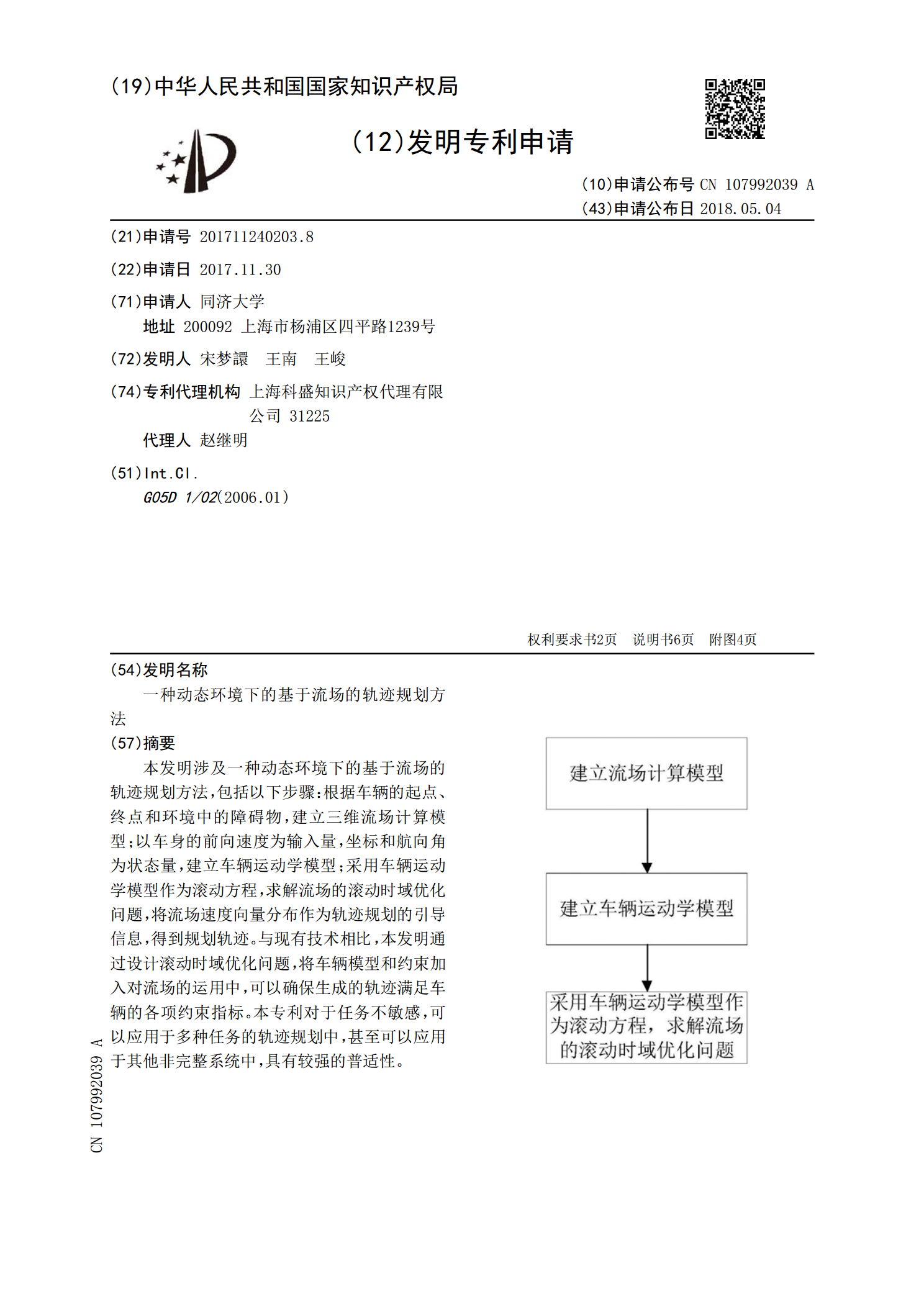
本发明涉及一种动态环境下的基于流场的轨迹规划方法,包括以下步骤:根据车辆的起点、终点和环境中的障碍物,建立三维流场计算模型;以车身的前向速度为输入量,坐标和航向角为状态量,建立车辆运动学模型;采用车辆运动学模型作为滚动方程,求解流场的滚动时域优化问题,将流场速度向量分布作为轨迹规划的引导信息,得到规划轨迹。与现有技术相比,本发明通过设计滚动时域优化问题,将车辆模型和约束加入对流场的运用中,可以确保生成的轨迹满足车辆的各项约束指标。本专利对于任务不敏感,可以应用于多种任务的轨迹规划中,甚至可以应用于其他非完

一种基于动态轨迹流的场景流数字孪生方法及系统.pdf
本发明公开了一种基于动态轨迹流的场景流数字孪生方法及系统,首先提出一种检测跟踪一体化多模态融合感知增强网络,在大幅度提高网络处理速度的同时,实现目标语义轨迹的精准提取与辨识;并提出一种结合道路布局与交通力耦合关系的目标轨迹预测方法,建模场景中语义的时序演变规律,实现交通运行环境中的目标轨迹预测;基于轨迹提取和语义辨识以及预测的运动轨迹,对中观层面交通态势的时序演变规律建模,获取基于真实目标动态轨迹流的场景流数字孪生。本发明能够有效实现目标语义轨迹的精准提取与辨识,同时可视化场景流数字孪生,为精准化交通管控

基于光流场和动态规划搜索的视觉匹配方法.pdf
本发明提供的基于光流场和动态规划搜索的视觉匹配方法,包括:对第一图像和第二图像分别进行图像分解,从而得到第一纹理图像和第二纹理图像;根据所述第一纹理图像和所述第二纹理图像构造图像金字塔;对所述图像金字塔的各个层数进行迭代循环,从而得到视差。本发明可以提高视差的准确性。
一种基于流场的无人车路径规划方法.pdf
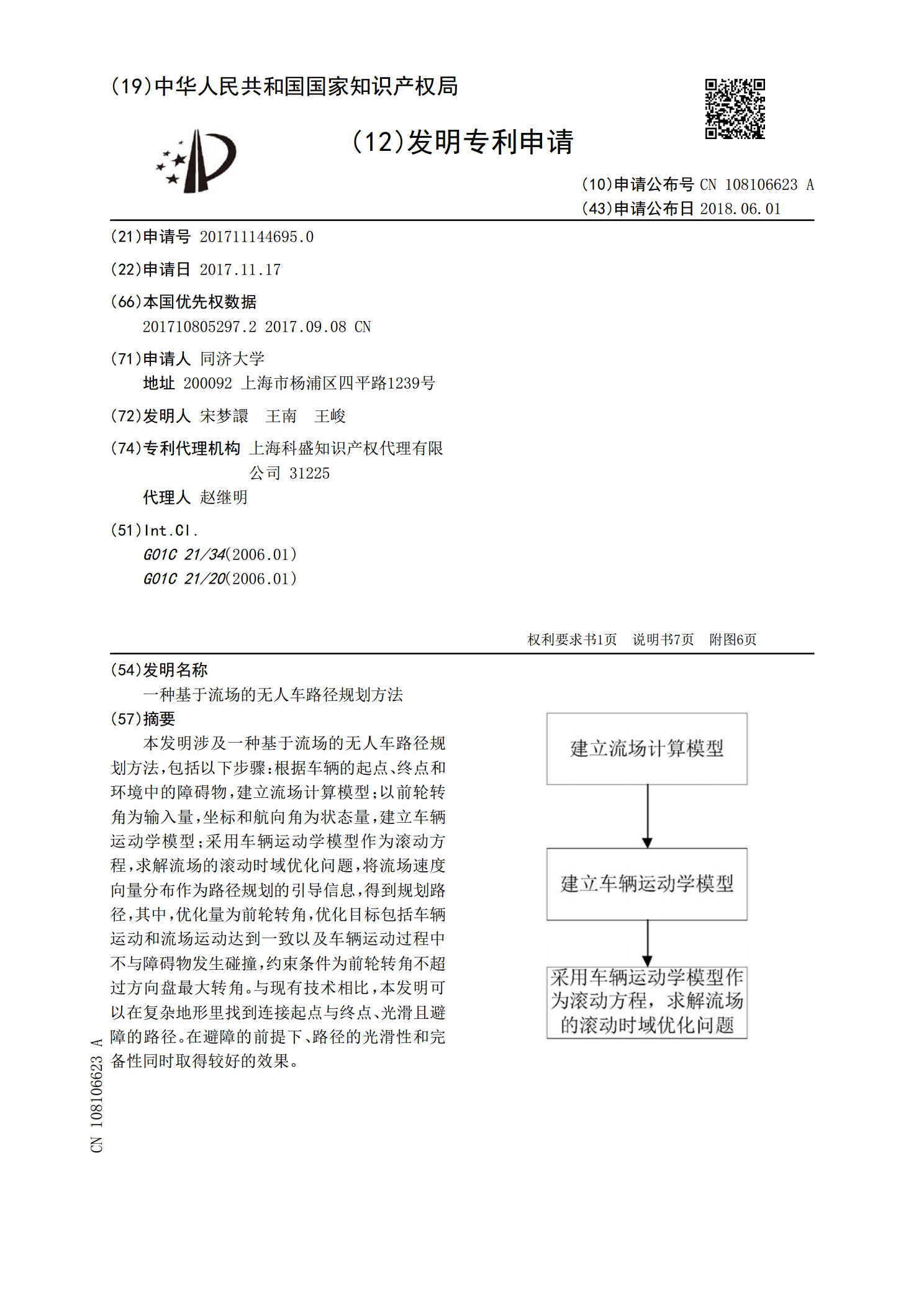
本发明涉及一种基于流场的无人车路径规划方法,包括以下步骤:根据车辆的起点、终点和环境中的障碍物,建立流场计算模型;以前轮转角为输入量,坐标和航向角为状态量,建立车辆运动学模型;采用车辆运动学模型作为滚动方程,求解流场的滚动时域优化问题,将流场速度向量分布作为路径规划的引导信息,得到规划路径,其中,优化量为前轮转角,优化目标包括车辆运动和流场运动达到一致以及车辆运动过程中不与障碍物发生碰撞,约束条件为前轮转角不超过方向盘最大转角。与现有技术相比,本发明可以在复杂地形里找到连接起点与终点、光滑且避障的路径。在
一种基于动态轨迹规划的自动驾驶连续避障方法.pdf
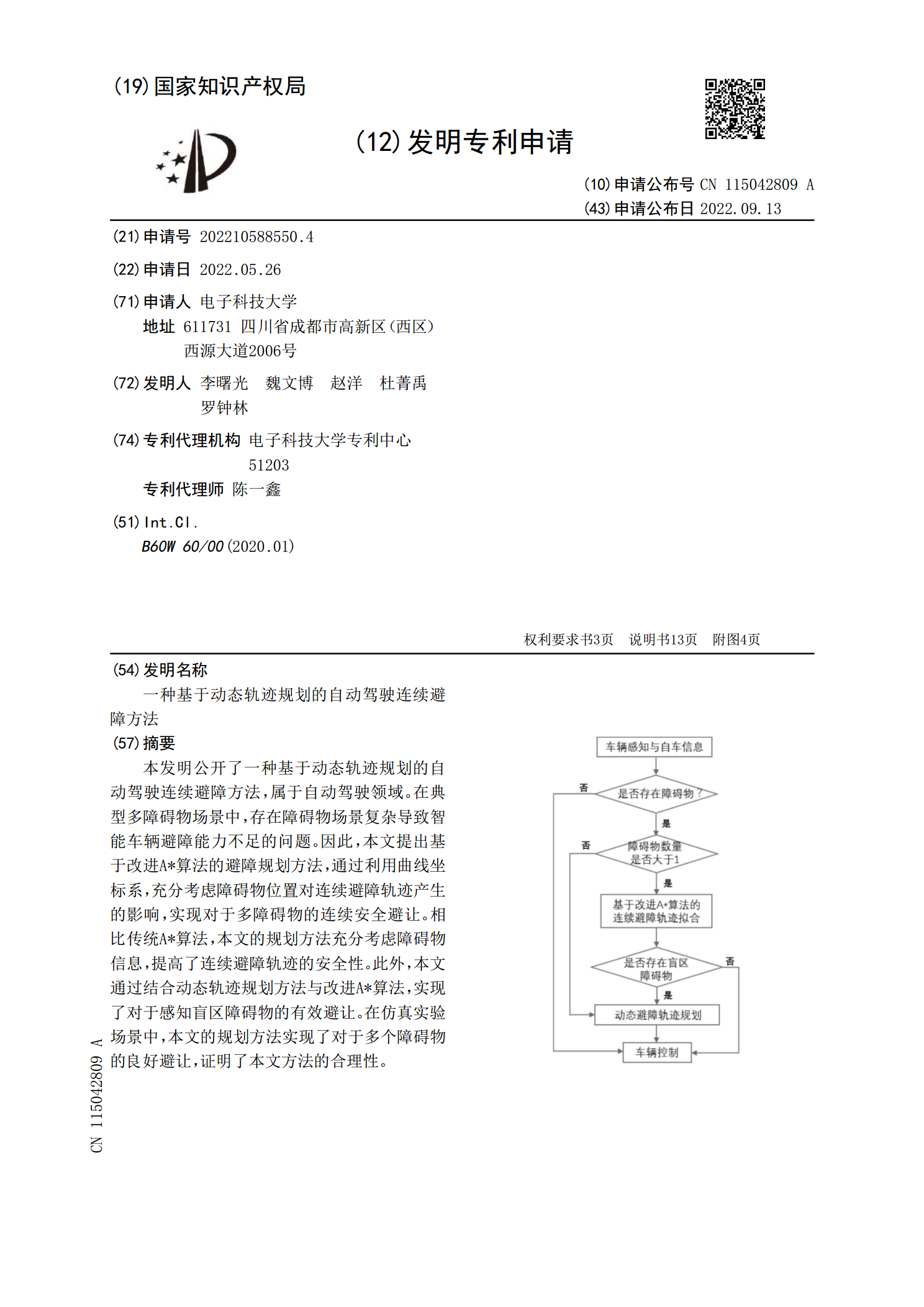
本发明公开了一种基于动态轨迹规划的自动驾驶连续避障方法,属于自动驾驶领域。在典型多障碍物场景中,存在障碍物场景复杂导致智能车辆避障能力不足的问题。因此,本文提出基于改进A*算法的避障规划方法,通过利用曲线坐标系,充分考虑障碍物位置对连续避障轨迹产生的影响,实现对于多障碍物的连续安全避让。相比传统A*算法,本文的规划方法充分考虑障碍物信息,提高了连续避障轨迹的安全性。此外,本文通过结合动态轨迹规划方法与改进A*算法,实现了对于感知盲区障碍物的有效避让。在仿真实验场景中,本文的规划方法实现了对于多个障碍物的良