
在电传操纵飞行器系统中用于配平控制的飞行器、系统和方法.pdf

曦晨****22


1/9
2/9
3/9
4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
在电传操纵飞行器系统中用于配平控制的飞行器、系统和方法.pdf
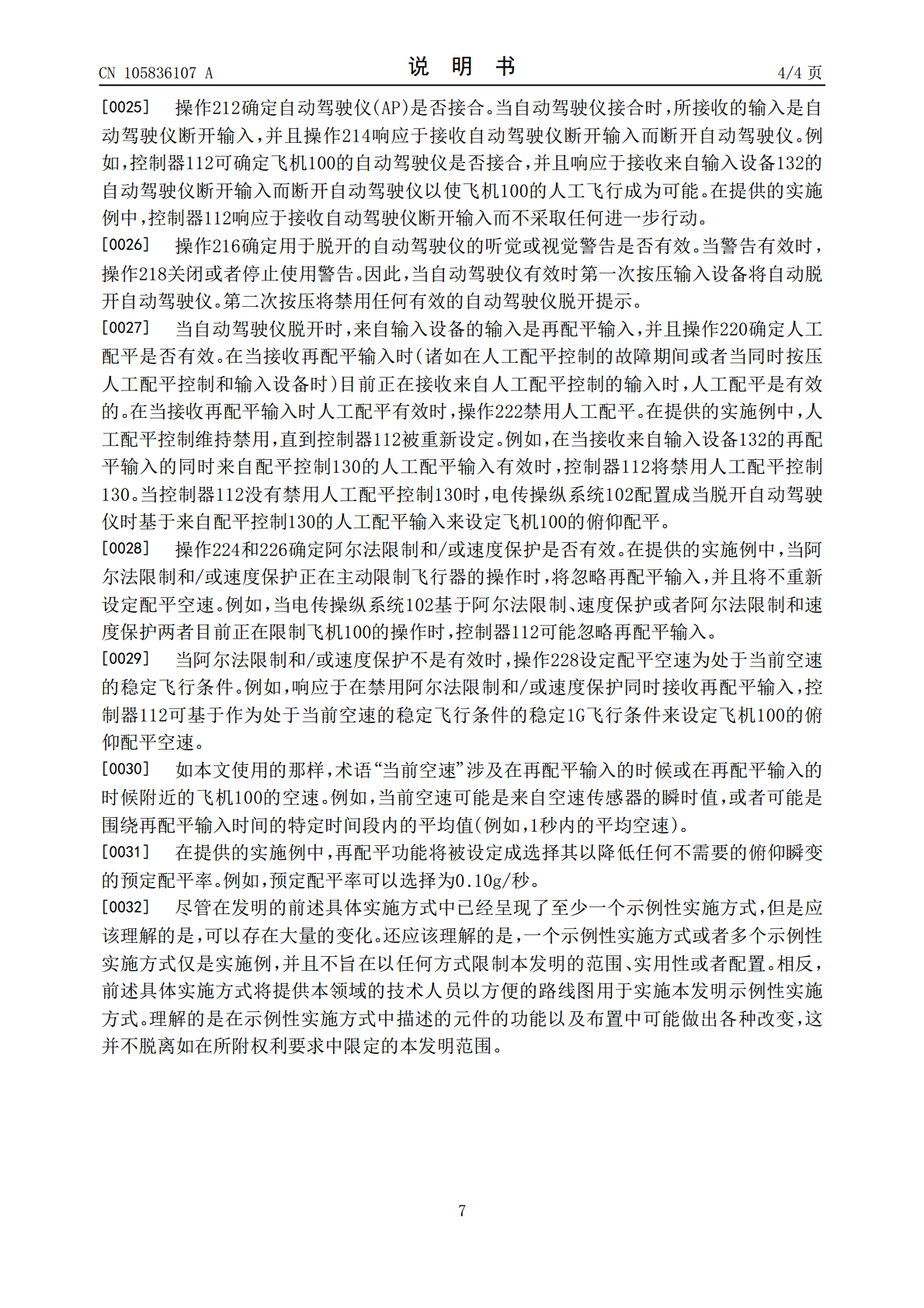
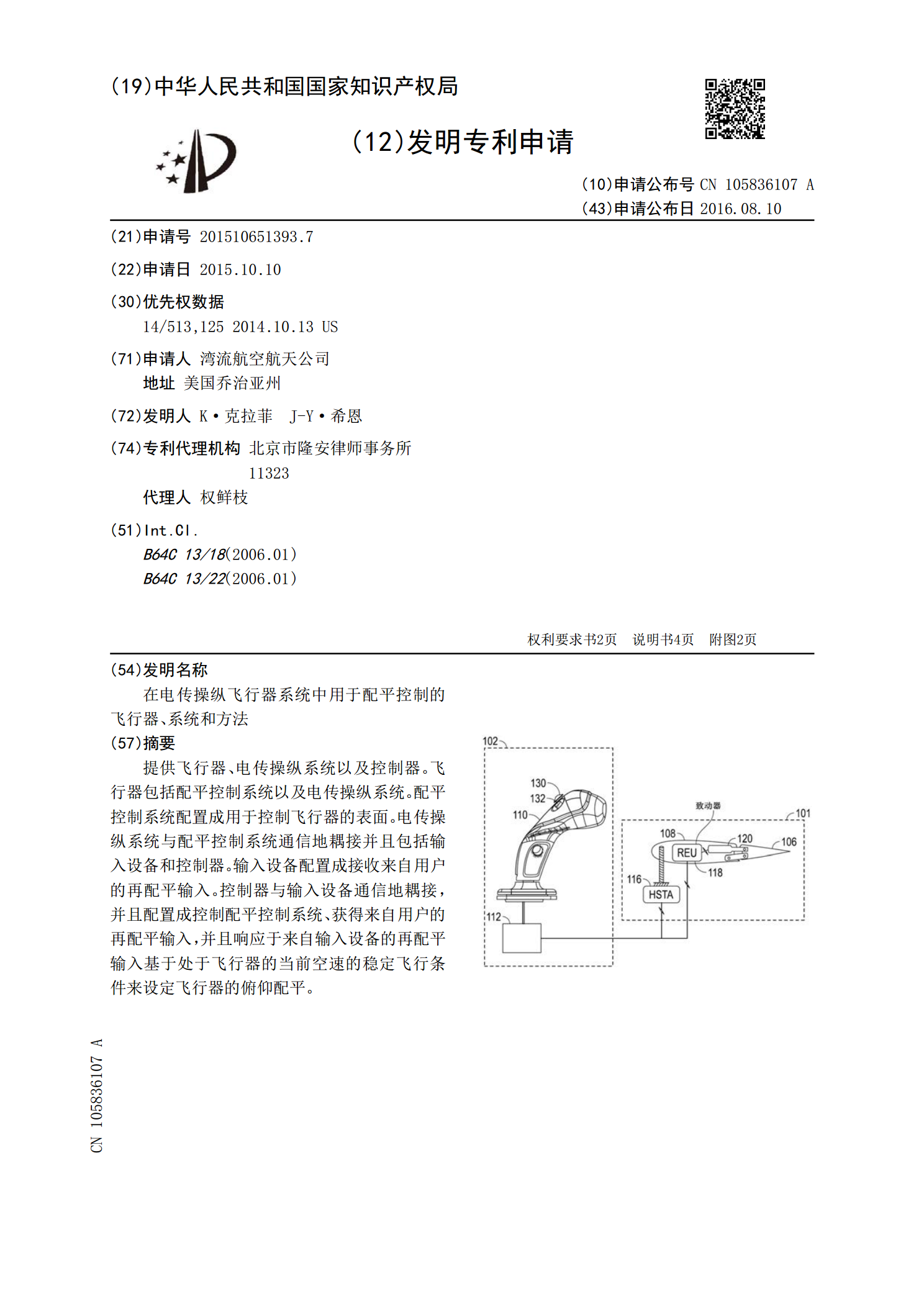
提供飞行器、电传操纵系统以及控制器。飞行器包括配平控制系统以及电传操纵系统。配平控制系统配置成用于控制飞行器的表面。电传操纵系统与配平控制系统通信地耦接并且包括输入设备和控制器。输入设备配置成接收来自用户的再配平输入。控制器与输入设备通信地耦接,并且配置成控制配平控制系统、获得来自用户的再配平输入,并且响应于来自输入设备的再配平输入基于处于飞行器的当前空速的稳定飞行条件来设定飞行器的俯仰配平。
用于控制飞行器的驱动系统的方法和控制系统.pdf
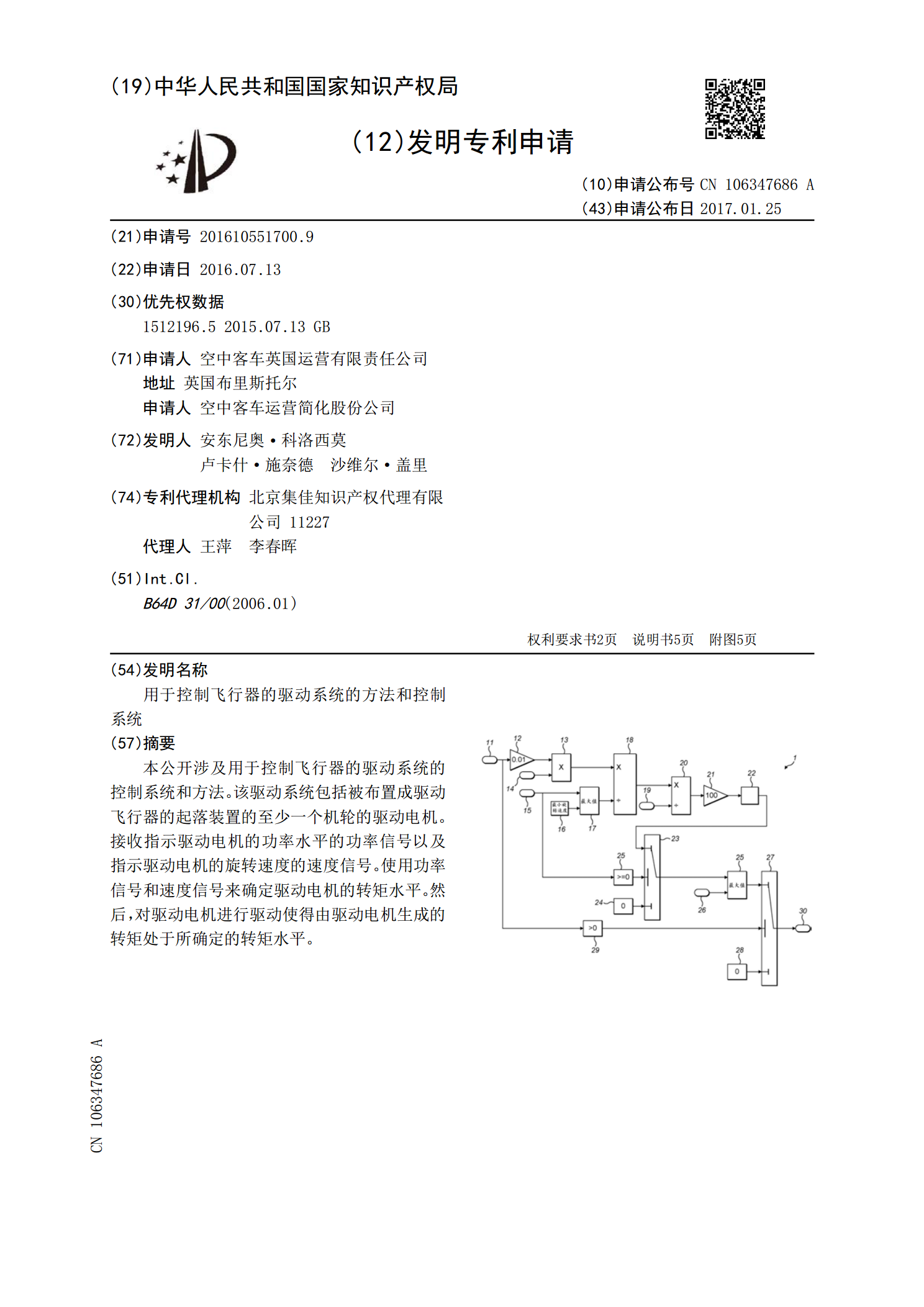
本公开涉及用于控制飞行器的驱动系统的控制系统和方法。该驱动系统包括被布置成驱动飞行器的起落装置的至少一个机轮的驱动电机。接收指示驱动电机的功率水平的功率信号以及指示驱动电机的旋转速度的速度信号。使用功率信号和速度信号来确定驱动电机的转矩水平。然后,对驱动电机进行驱动使得由驱动电机生成的转矩处于所确定的转矩水平。
用于冷却飞行器部件的系统和方法.pdf
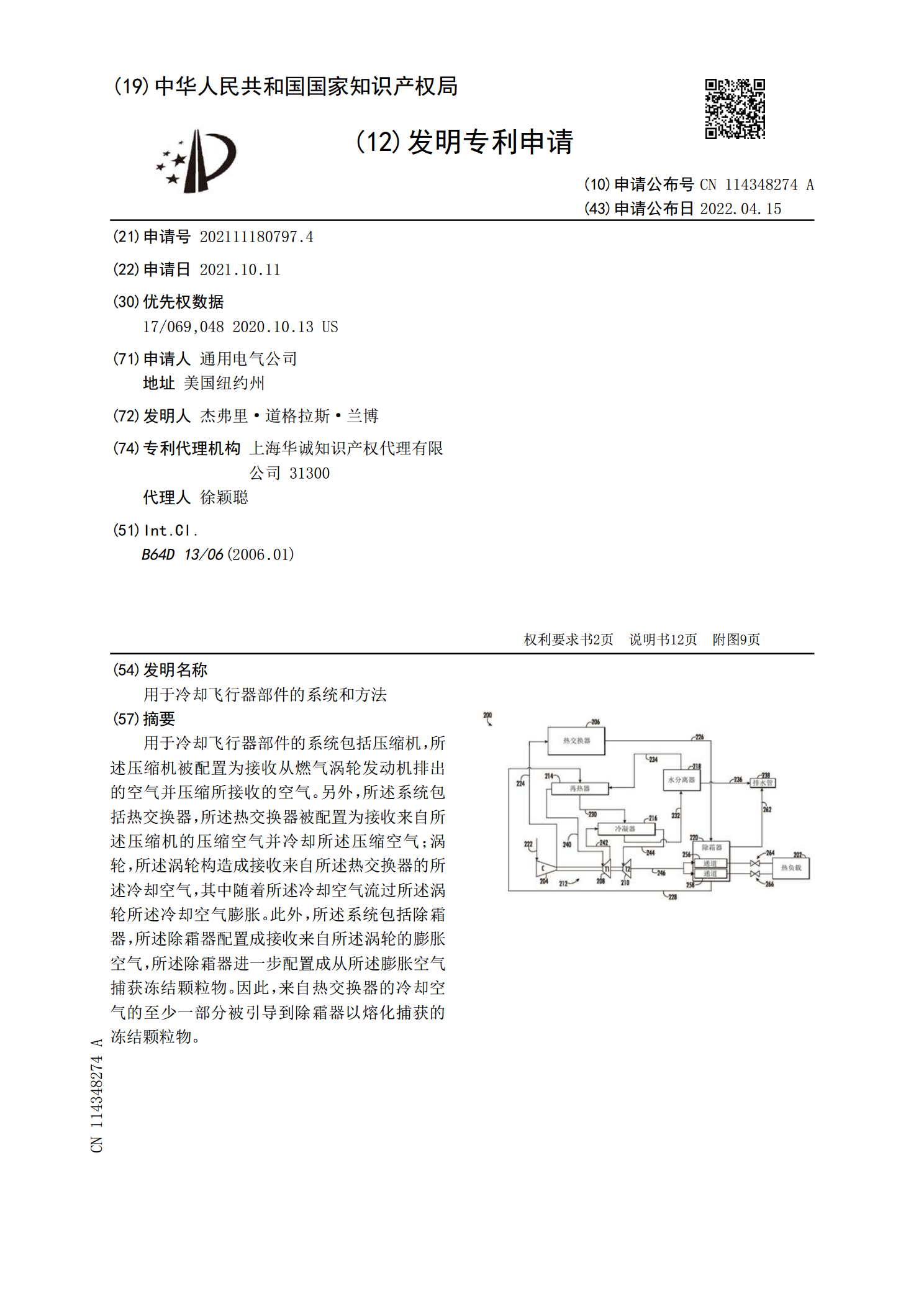
用于冷却飞行器部件的系统包括压缩机,所述压缩机被配置为接收从燃气涡轮发动机排出的空气并压缩所接收的空气。另外,所述系统包括热交换器,所述热交换器被配置为接收来自所述压缩机的压缩空气并冷却所述压缩空气;涡轮,所述涡轮构造成接收来自所述热交换器的所述冷却空气,其中随着所述冷却空气流过所述涡轮所述冷却空气膨胀。此外,所述系统包括除霜器,所述除霜器配置成接收来自所述涡轮的膨胀空气,所述除霜器进一步配置成从所述膨胀空气捕获冻结颗粒物。因此,来自热交换器的冷却空气的至少一部分被引导到除霜器以熔化捕获的冻结颗粒物。

用于飞行器引导的方法和系统.pdf
一种用于飞行器引导的方法和系统。本发明涉及由飞行管理系统(FMS)执行的飞行器的飞行管理和引导方法,该飞行管理系统包括以下步骤:-产生参考轨迹(TRAJ
用于跟踪飞行器部件的系统和方法.pdf
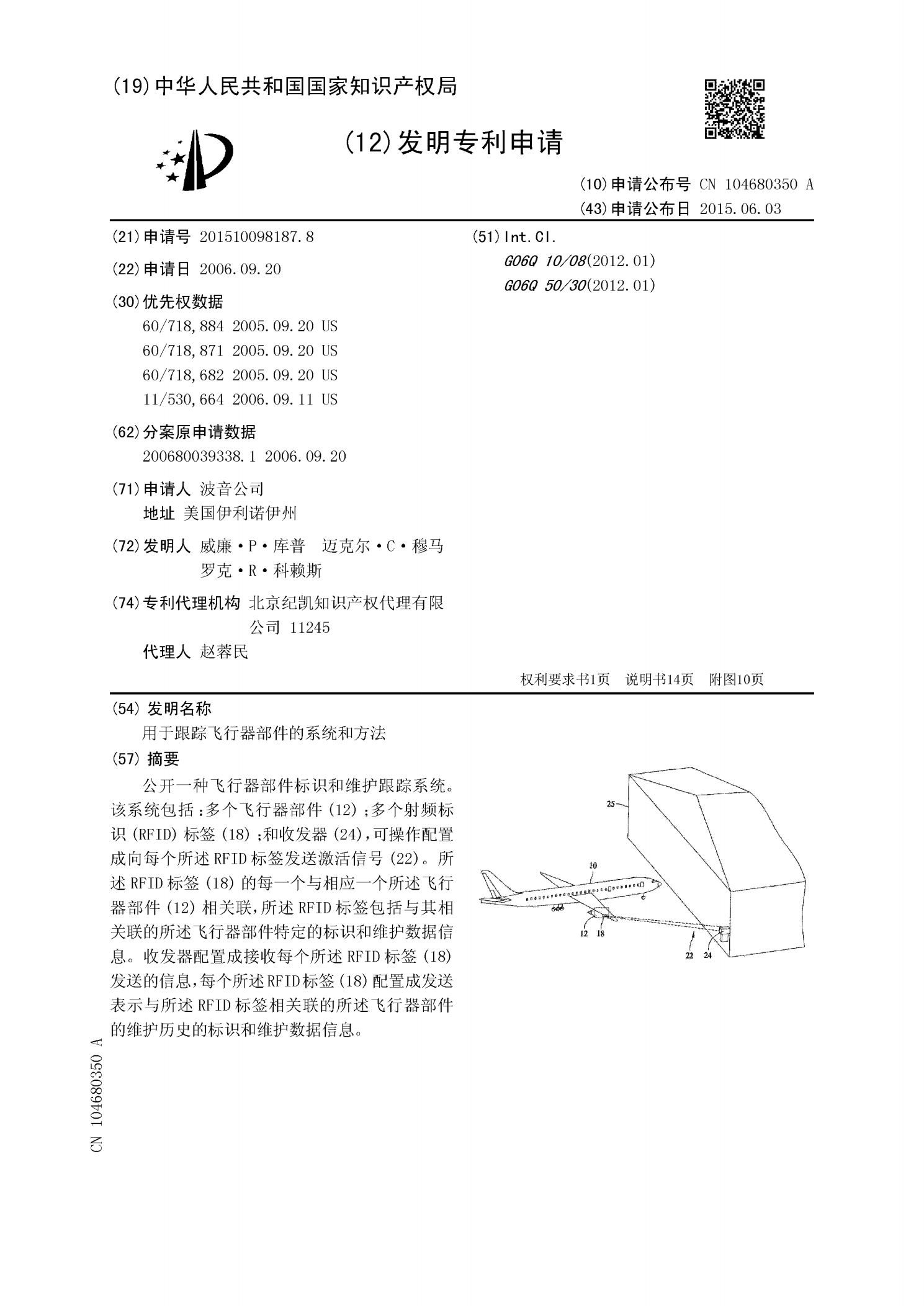
公开一种飞行器部件标识和维护跟踪系统。该系统包括:多个飞行器部件(12);多个射频标识(RFID)标签(18);和收发器(24),可操作配置成向每个所述RFID标签发送激活信号(22)。所述RFID标签(18)的每一个与相应一个所述飞行器部件(12)相关联,所述RFID标签包括与其相关联的所述飞行器部件特定的标识和维护数据信息。收发器配置成接收每个所述RFID标签(18)发送的信息,每个所述RFID标签(18)配置成发送表示与所述RFID标签相关联的所述飞行器部件的维护历史的标识和维护数据信息。