
一种磁吸附式钢丝绳巡检机器人.pdf

是雁****找我

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种磁吸附式钢丝绳巡检机器人.pdf
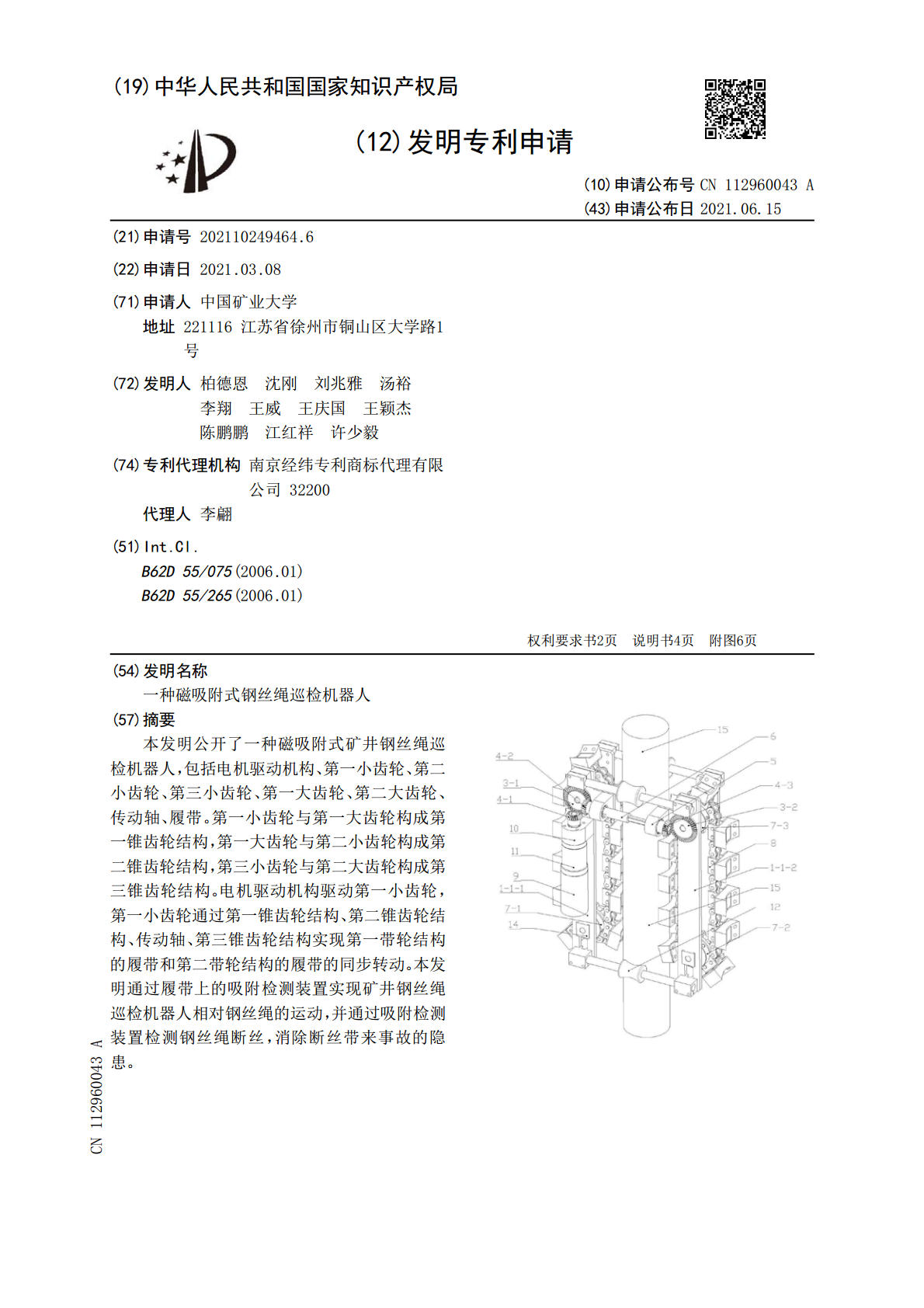
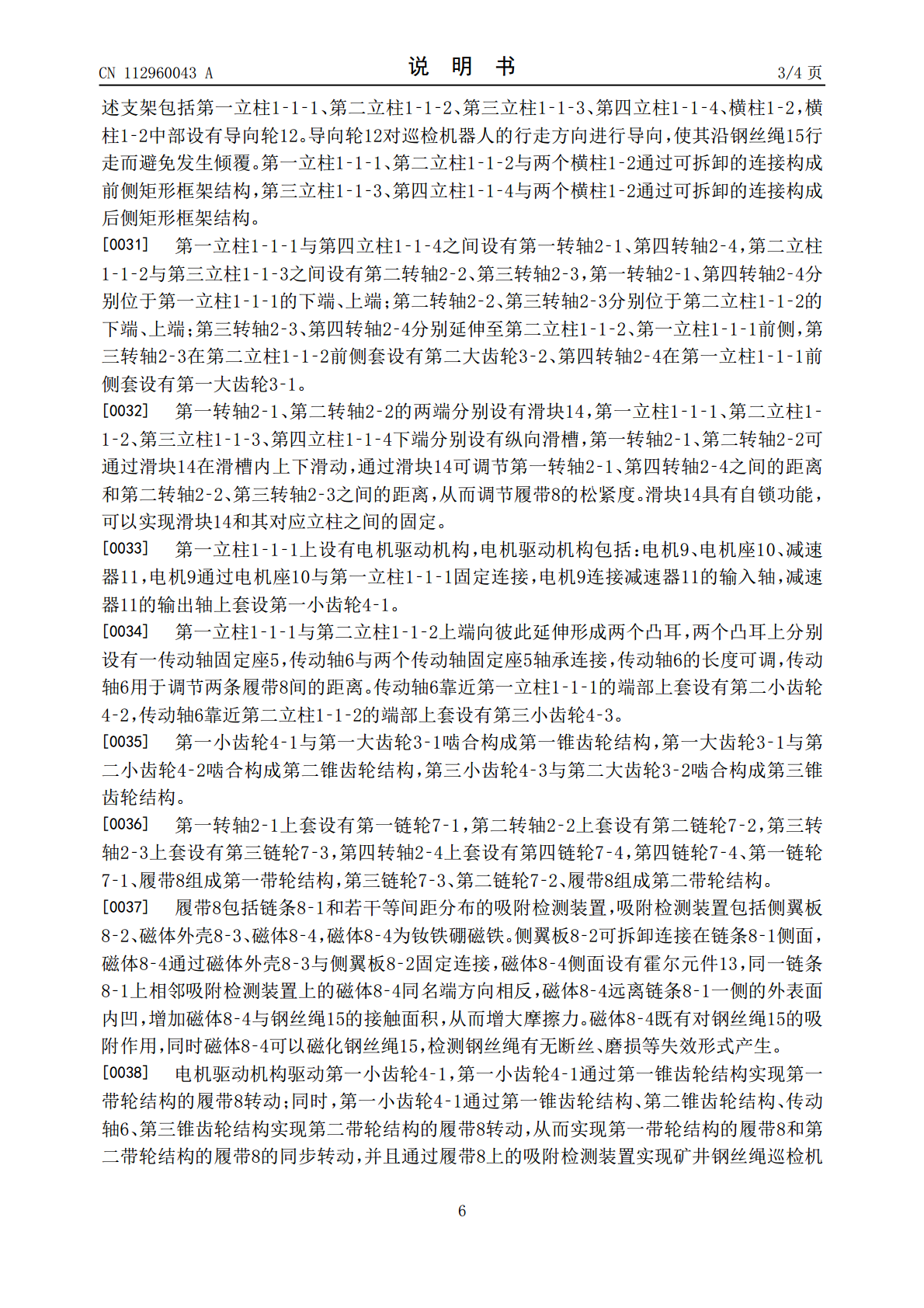
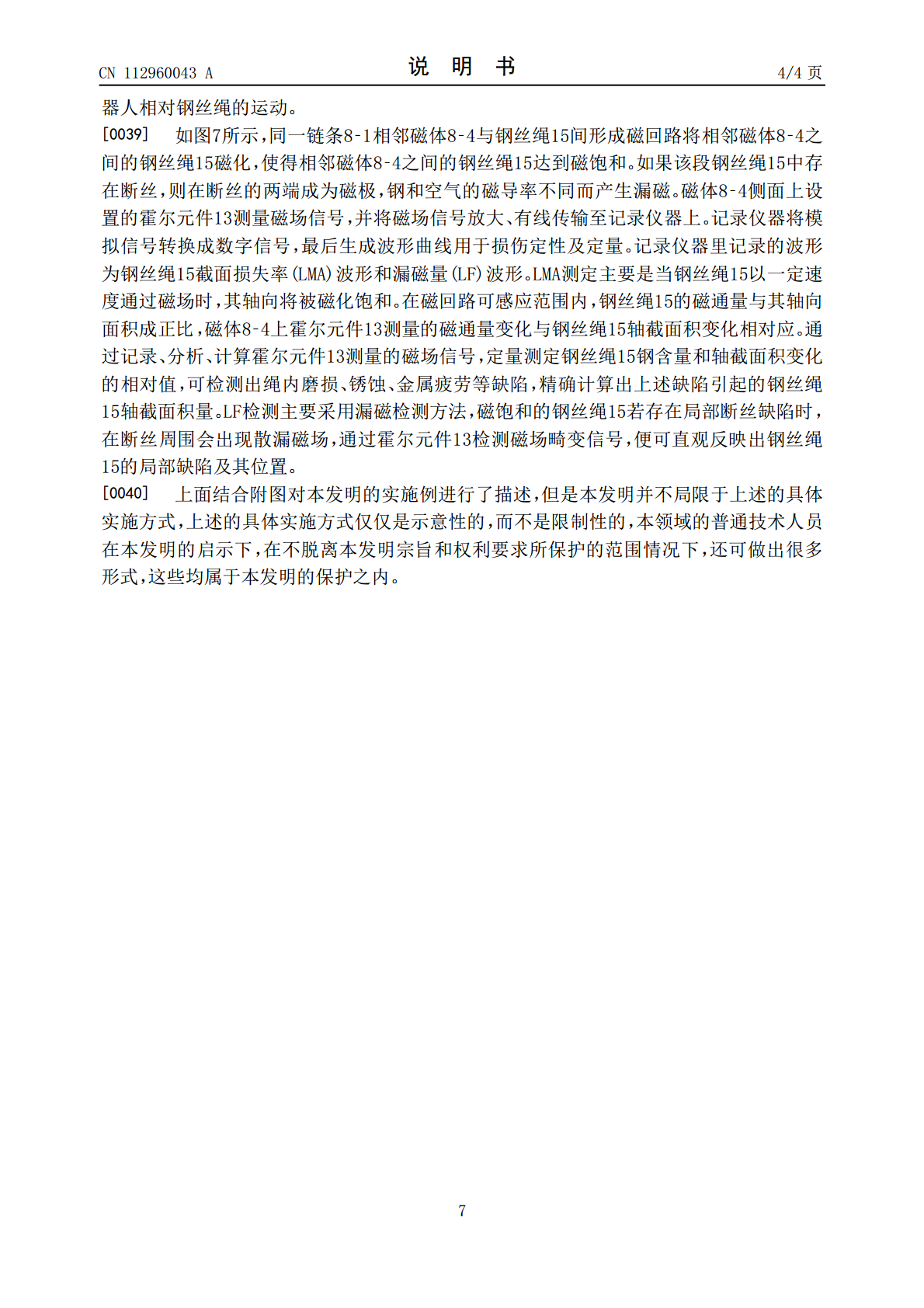
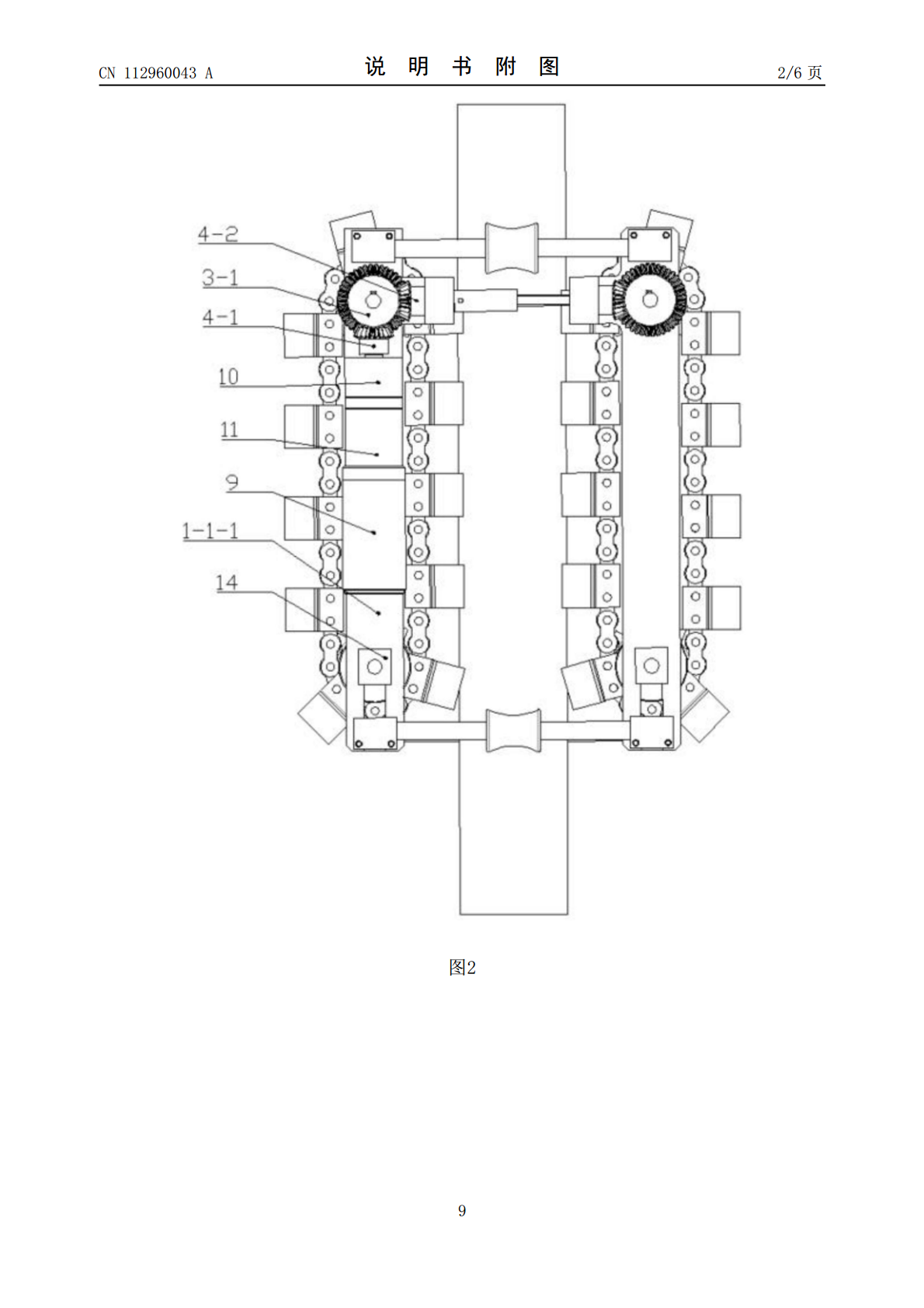
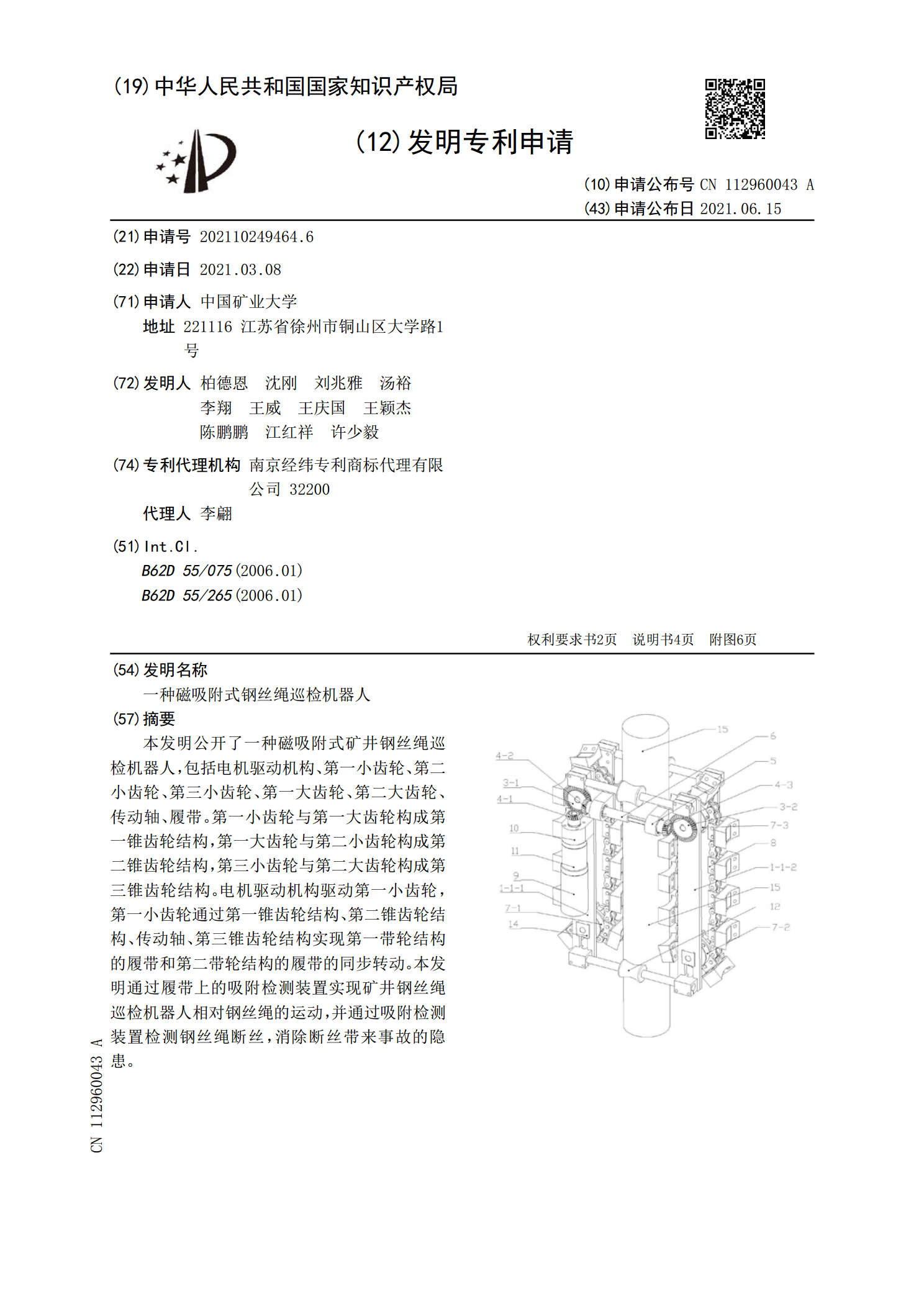
本发明公开了一种磁吸附式矿井钢丝绳巡检机器人,包括电机驱动机构、第一小齿轮、第二小齿轮、第三小齿轮、第一大齿轮、第二大齿轮、传动轴、履带。第一小齿轮与第一大齿轮构成第一锥齿轮结构,第一大齿轮与第二小齿轮构成第二锥齿轮结构,第三小齿轮与第二大齿轮构成第三锥齿轮结构。电机驱动机构驱动第一小齿轮,第一小齿轮通过第一锥齿轮结构、第二锥齿轮结构、传动轴、第三锥齿轮结构实现第一带轮结构的履带和第二带轮结构的履带的同步转动。本发明通过履带上的吸附检测装置实现矿井钢丝绳巡检机器人相对钢丝绳的运动,并通过吸附检测装置检测钢

一种吸附式钢丝绳巡检机器人.pdf
本发明属于巡检机器人技术领域,且公开了一种吸附式钢丝绳巡检机器人,包括底座、检测相机、钢丝绳和行走机构,所述底座的顶部固定安装有两个标记环,所述标记环的内部固定套接有三个等角度分布的固定筒,所述固定筒的内侧端固定连接有伸缩杆且通过伸缩杆活动连接有标记轮,所述固定筒的内部密封套接有防锈液和套接柱。本发明通过二号弹簧带动套接柱向外侧一端移动(外侧一端指的使固定筒的开口处指向的方向),从而将连通槽与密封块错开,使染色剂自动沿着连通槽渗入二号出液槽,然后通过接触块涂抹于标记轮的外表面,然后对钢丝绳外表面腐蚀区域的
一种磁吸附巡检机器人及其控制方法.pdf
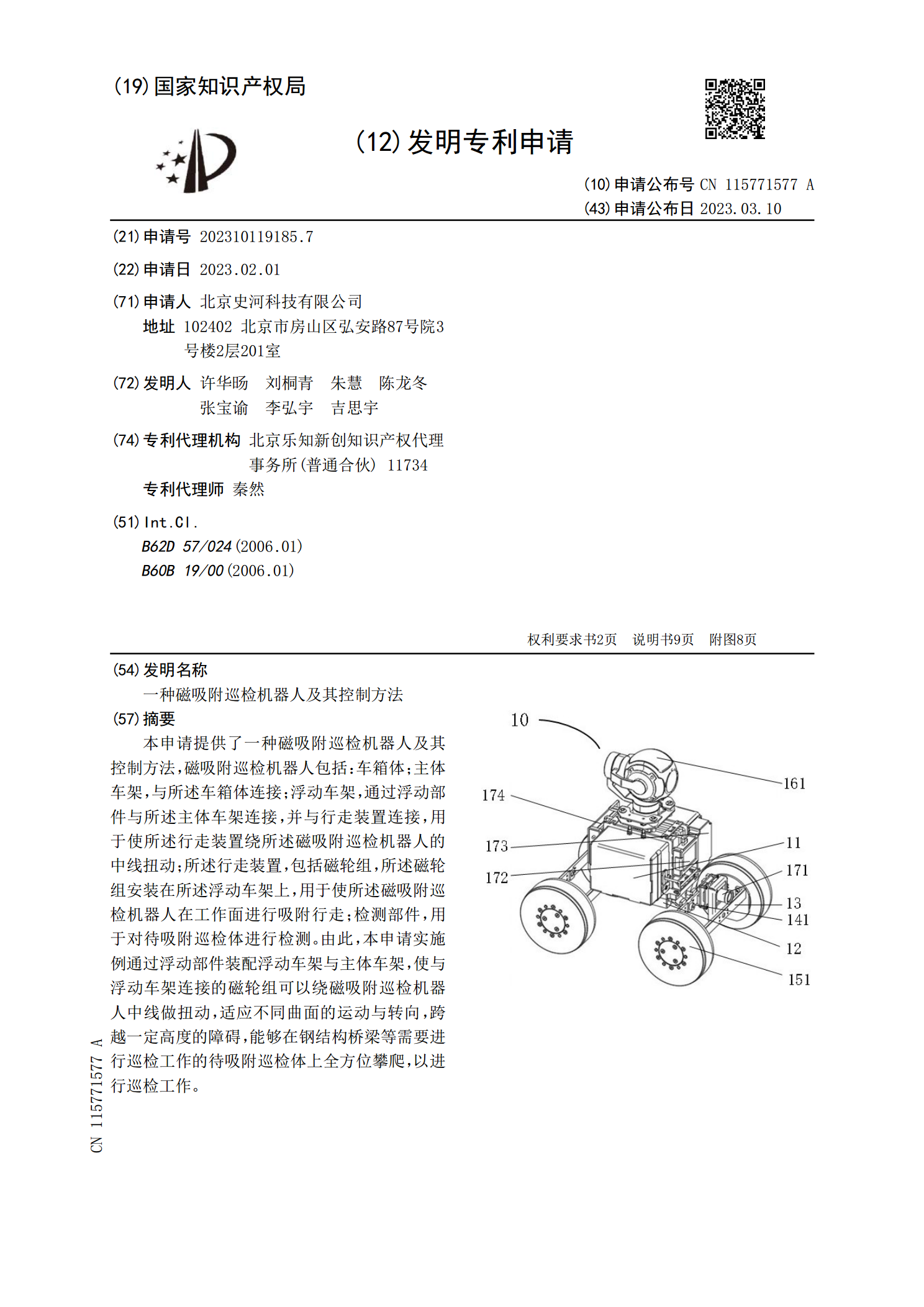
本申请提供了一种磁吸附巡检机器人及其控制方法,磁吸附巡检机器人包括:车箱体;主体车架,与所述车箱体连接;浮动车架,通过浮动部件与所述主体车架连接,并与行走装置连接,用于使所述行走装置绕所述磁吸附巡检机器人的中线扭动;所述行走装置,包括磁轮组,所述磁轮组安装在所述浮动车架上,用于使所述磁吸附巡检机器人在工作面进行吸附行走;检测部件,用于对待吸附巡检体进行检测。由此,本申请实施例通过浮动部件装配浮动车架与主体车架,使与浮动车架连接的磁轮组可以绕磁吸附巡检机器人中线做扭动,适应不同曲面的运动与转向,跨越一定高度
一种磁吸附式爬壁机器人.pdf
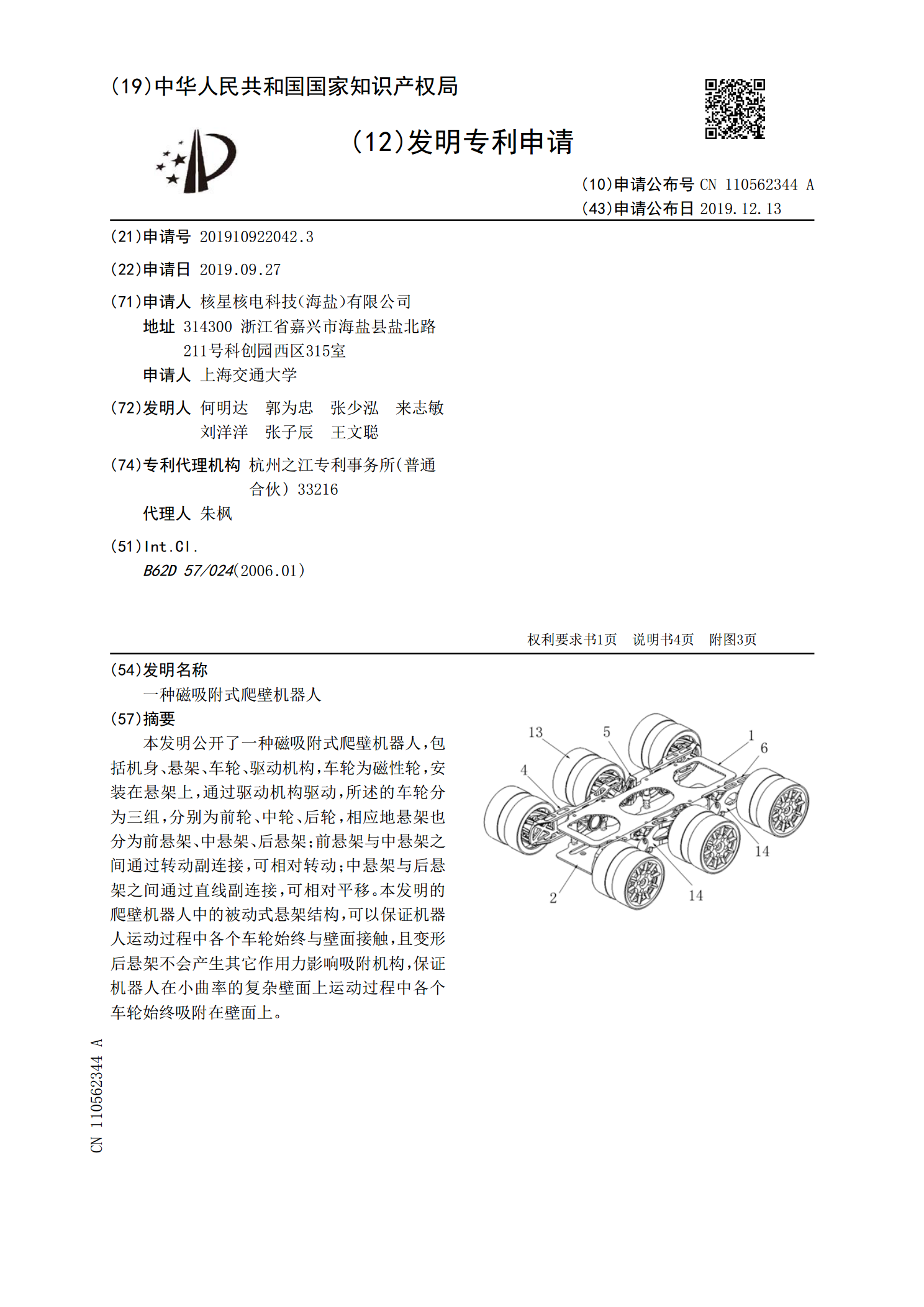
本发明公开了一种磁吸附式爬壁机器人,包括机身、悬架、车轮、驱动机构,车轮为磁性轮,安装在悬架上,通过驱动机构驱动,所述的车轮分为三组,分别为前轮、中轮、后轮,相应地悬架也分为前悬架、中悬架、后悬架;前悬架与中悬架之间通过转动副连接,可相对转动;中悬架与后悬架之间通过直线副连接,可相对平移。本发明的爬壁机器人中的被动式悬架结构,可以保证机器人运动过程中各个车轮始终与壁面接触,且变形后悬架不会产生其它作用力影响吸附机构,保证机器人在小曲率的复杂壁面上运动过程中各个车轮始终吸附在壁面上。
一种磁吸附式爬壁机器人底盘及磁轮组件.pdf
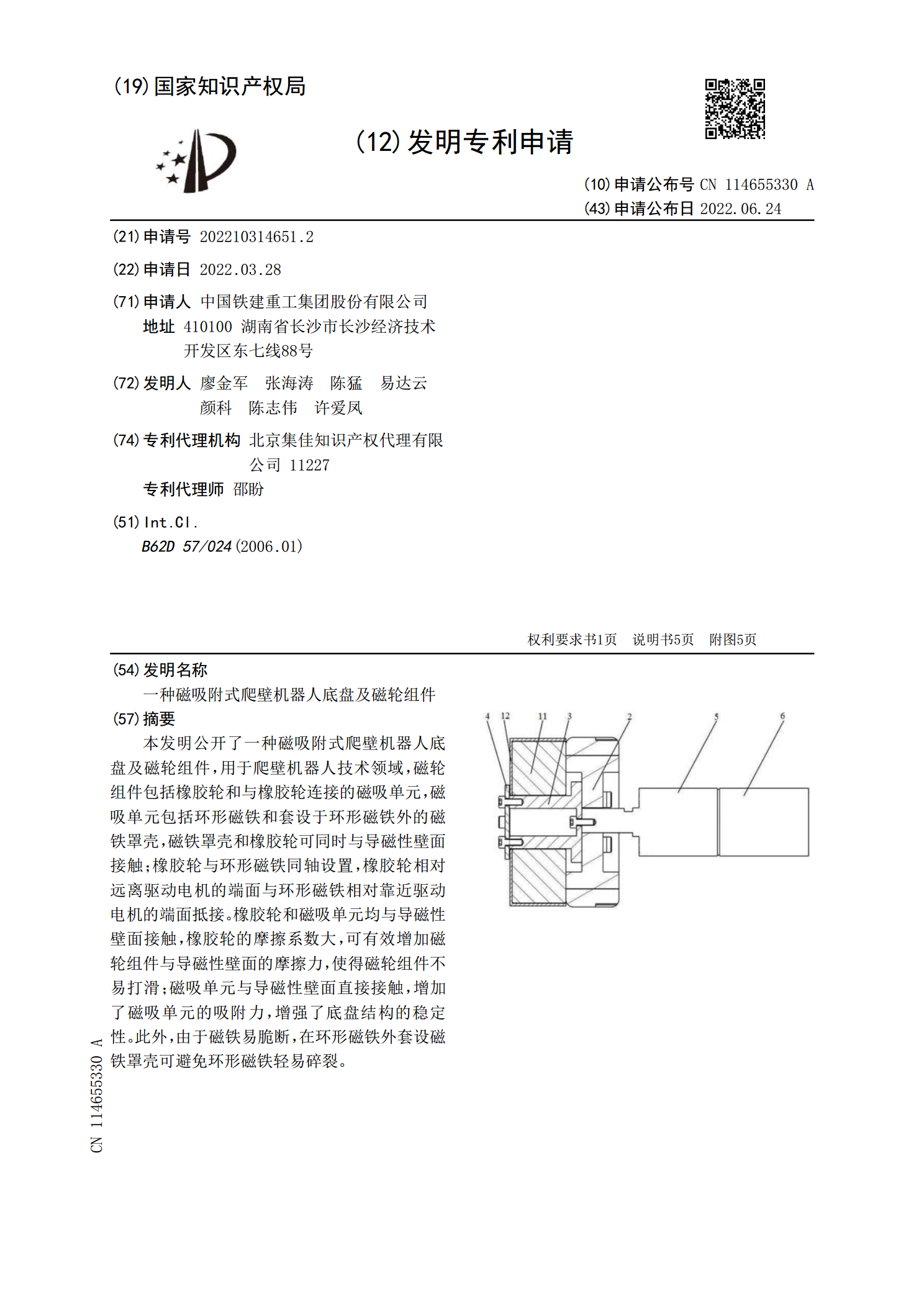
本发明公开了一种磁吸附式爬壁机器人底盘及磁轮组件,用于爬壁机器人技术领域,磁轮组件包括橡胶轮和与橡胶轮连接的磁吸单元,磁吸单元包括环形磁铁和套设于环形磁铁外的磁铁罩壳,磁铁罩壳和橡胶轮可同时与导磁性壁面接触;橡胶轮与环形磁铁同轴设置,橡胶轮相对远离驱动电机的端面与环形磁铁相对靠近驱动电机的端面抵接。橡胶轮和磁吸单元均与导磁性壁面接触,橡胶轮的摩擦系数大,可有效增加磁轮组件与导磁性壁面的摩擦力,使得磁轮组件不易打滑;磁吸单元与导磁性壁面直接接触,增加了磁吸单元的吸附力,增强了底盘结构的稳定性。此外,由于磁铁