
一种定位定向组合导航类显控方法.pdf

小宏****aa


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种定位定向组合导航类显控方法.pdf
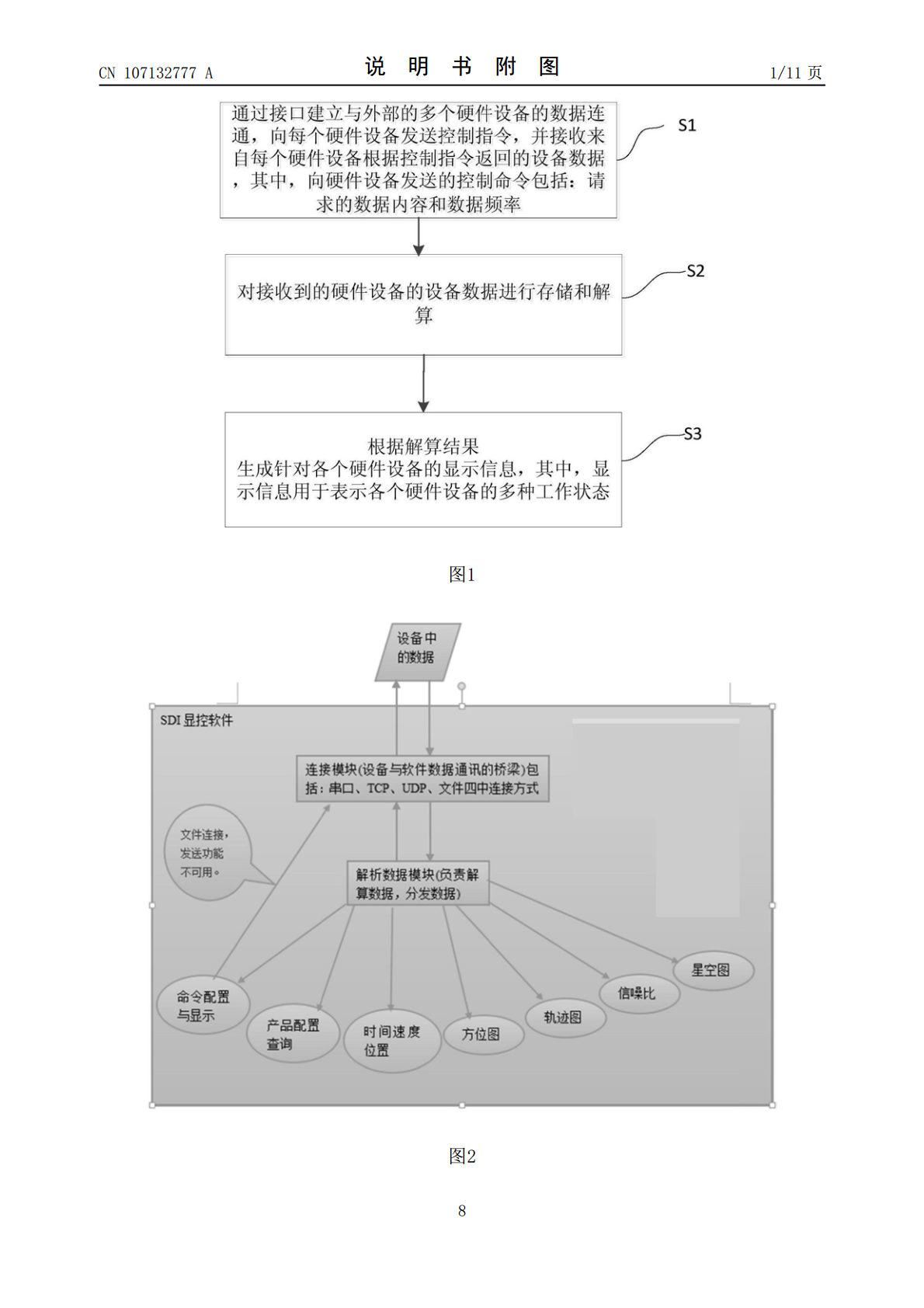
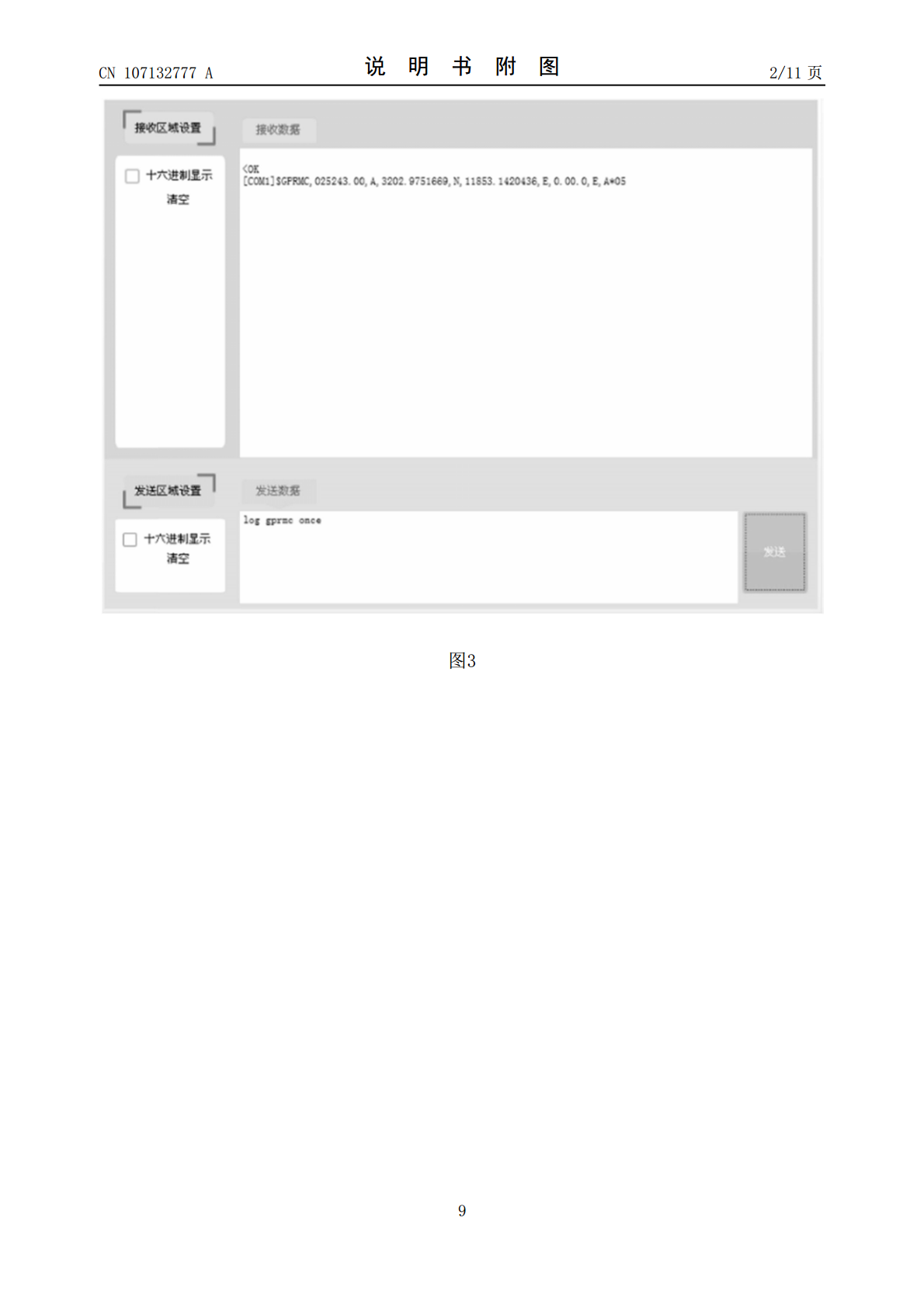
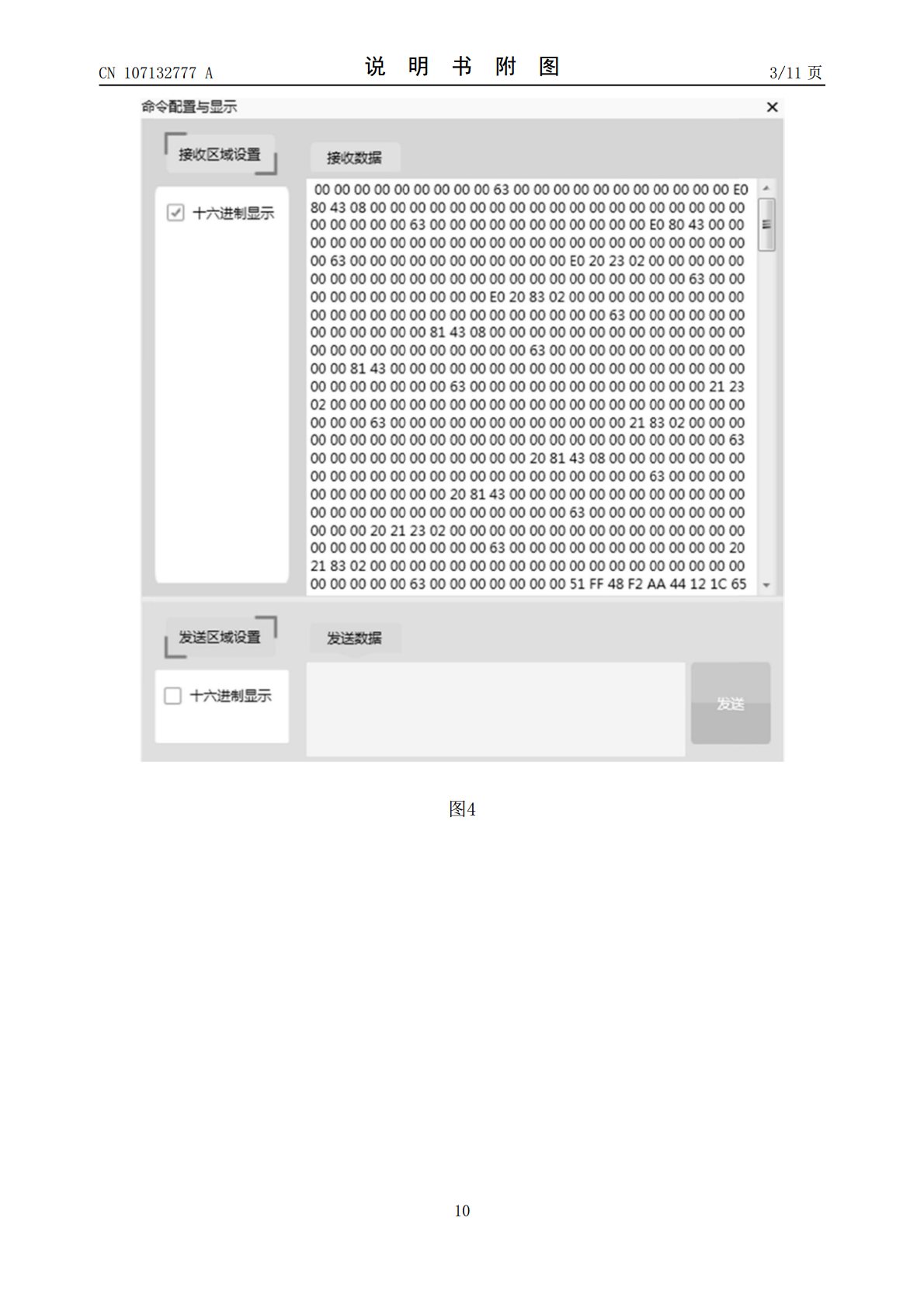
本发明提出了一种定位定向组合导航类显控方法,包括:通过接口建立与外部的多个硬件设备的数据连通,向每个所述硬件设备发送控制指令,并接收来自每个所述硬件设备的设备数据;对接收到的设备数据进行存储和解算;根据解算结果生成针对各个硬件设备的显示信息,其中,所述显示信息用于表示各个硬件设备的多种工作状态。本发明具有较高的设备兼容性,通过对接收到的设备数据的实时存储分析,实时显示各类设备的多种状态,同时支持显示信息的可扩展性,从而便于用户进行监控。
一种高精度的组合导航定位方法.pdf
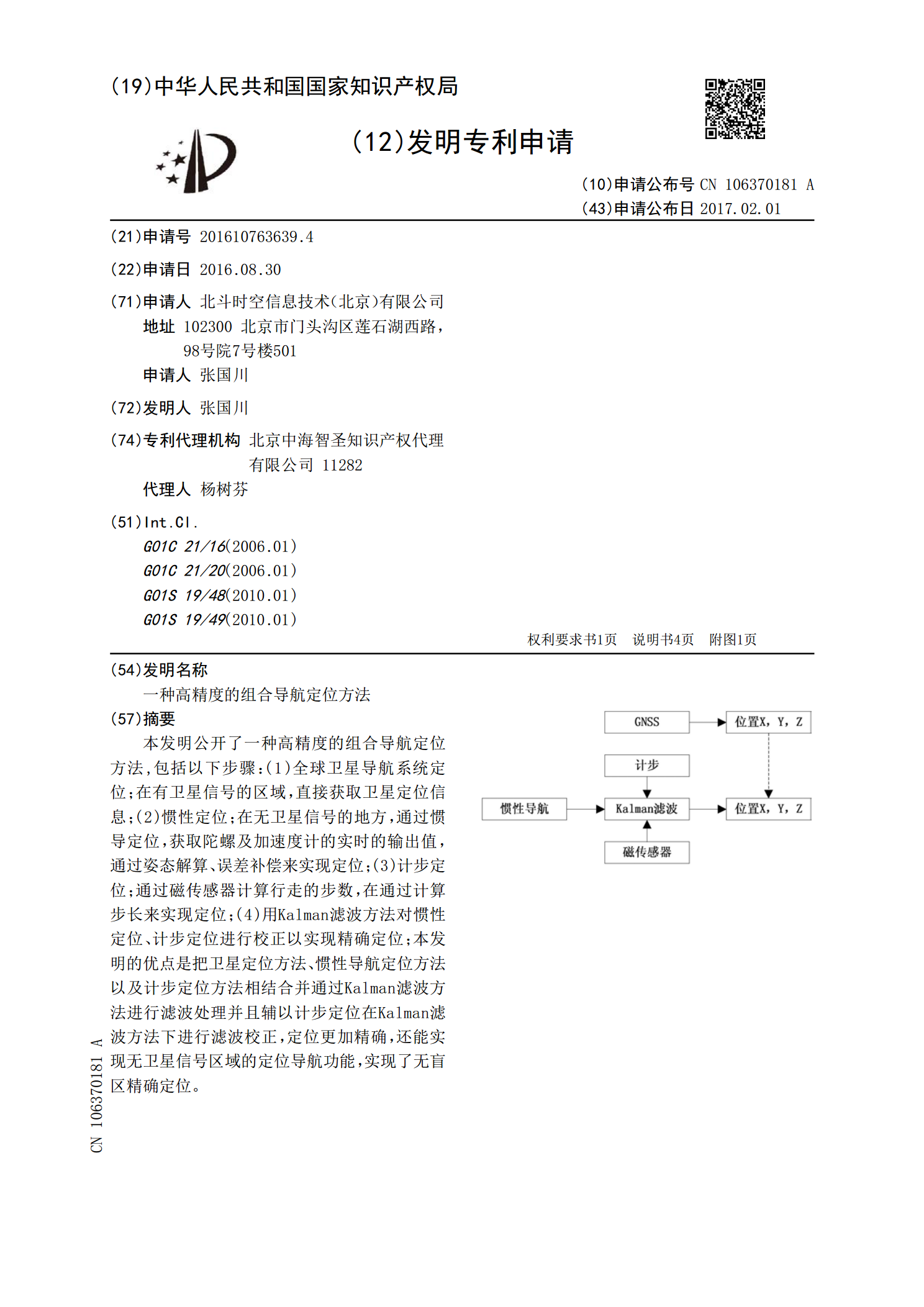
本发明公开了一种高精度的组合导航定位方法,包括以下步骤:(1)全球卫星导航系统定位;在有卫星信号的区域,直接获取卫星定位信息;(2)惯性定位;在无卫星信号的地方,通过惯导定位,获取陀螺及加速度计的实时的输出值,通过姿态解算、误差补偿来实现定位;(3)计步定位;通过磁传感器计算行走的步数,在通过计算步长来实现定位;(4)用Kalman滤波方法对惯性定位、计步定位进行校正以实现精确定位;本发明的优点是把卫星定位方法、惯性导航定位方法以及计步定位方法相结合并通过Kalman滤波方法进行滤波处理并且辅以计步定位在

一种车载导航车辆组合定位装置及其组合定位方法.pdf
本发明公开了一种车载导航车辆组合定位装置及其组合定位方法,包括MCU组合导航计算模块、GNSS模块以及经MCU组合导航计算模块计算获得的定位输出,还包括车轮轮速脉冲计数器,由车轮轮速脉冲计数器和GNSS模块共同组合输入至MCU组合导航计算模块。定位方法包括读取车轮轮速脉冲数,获得轮速脉冲输入;利用轮速脉冲数递推计算位置,判断是否读入GNSS数据,以读入GNSS数据作为条件,读入可靠的GNSS数据;获得定位输出及误差修正等步骤。降低系统使用成本,提高定位可靠有效性,可得到与原来INS/GNSS组合同样效果,

一种卫星导航与惯性导航超紧组合仿真定位的方法及终端.pdf
本发明公开了一种卫星导航与惯性导航超紧组合仿真定位的方法及终端,方法包括:获取仿真载体运动轨迹;根据仿真载体运动轨迹,生成仿真卫星导航信号以及仿真惯性导航数据;仿真惯性导航数据通过多普勒频率对仿真卫星导航信号处理进行辅助作用;根据仿真卫星导航、仿真惯性导航分别计算出距离以及速度;通过组合导航卡尔曼滤波器进行滤波;滤波结果对惯性导航数据进行定位校正,输出定位结果。本发明通过仿真惯性导航数据对卫星导航信号进行辅助、互补,实现深层次的双系统组合,可以最充分地利用双系统互补的信息,最大程度地提升导航性能;大大提升

一种用于机器人组合的导航定位方法.pdf
本发明公开了一种用于机器人组合的导航定位方法,采用捷联惯性导航装置测量机器人的位置、速度、航向姿态信号并传送给信息融合模块;其将导航系下的位置矢量和航向角与载体系下速度矢量和加速度矢量作为滤波器状态矢量,滤波结果被机器人控制;取GPS接收机输出的水平位置信息,航姿参考系统输出的航向、姿态及载体系下加速度信息与载体系下多普勒测速声纳的速度信息,通过强跟踪无迹卡尔曼滤波器实现机器人的自主校正与数据滤波;信息融合模块将捷联惯性导航装置、无迹卡尔曼滤波器的信息进行融合,输出航行器导航信息,并校正捷联惯性导航装置;