
用于雷达垂直失准检测的系统和方法.pdf

一只****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于雷达垂直失准检测的系统和方法.pdf
用于检测安装在车辆上的雷达传感器的垂直失准的系统和方法。一个系统包括控制器。所述控制器被配置为当车辆和目标中的一者运动时从所述雷达传感器接收来自所述目标的多个反射雷达信号,并确定多个数据点,所述多个数据点中的每个对应于所述多个反射雷达信号中的一个。所述控制器还被配置为基于所述多个数据点确定曲线,并且通过将所述曲线与多个预先记录的曲线中的一个匹配和将所述雷达传感器的垂直对准角度设定为与所述多个预先记录的曲线中的所述一个相关联的角度,来确定所述雷达传感器的垂直对准角度。

用于基于雷达检测房间中的人的系统和方法.pdf
本发明涉及检测系统。以前,传感器不能充分地检测房间中久坐的人的存在。本发明的实施例使用多普勒雷达传感器来测量与占用者相关的生理信号,以及计算占用者的心肺运动位移的黎曼积分(RI)、身体运动指数(BMI)和身体运动的幅度差积累量(ADA)。可以通过自适应阈值化来确定检测到占用者。

用于压缩雷达数据的方法和系统.pdf
本公开提供用于压缩雷达数据的方法和系统。该方法包括由计算机硬件组件执行的以下步骤:获取包括多个多普勒区间的雷达数据;确定多个多普勒区间中的哪个多普勒区间表示静止对象;并且基于所确定的表示静止对象的多普勒区间确定经压缩的雷达数据。
雷达设备和用于检测雷达目标的方法.pdf
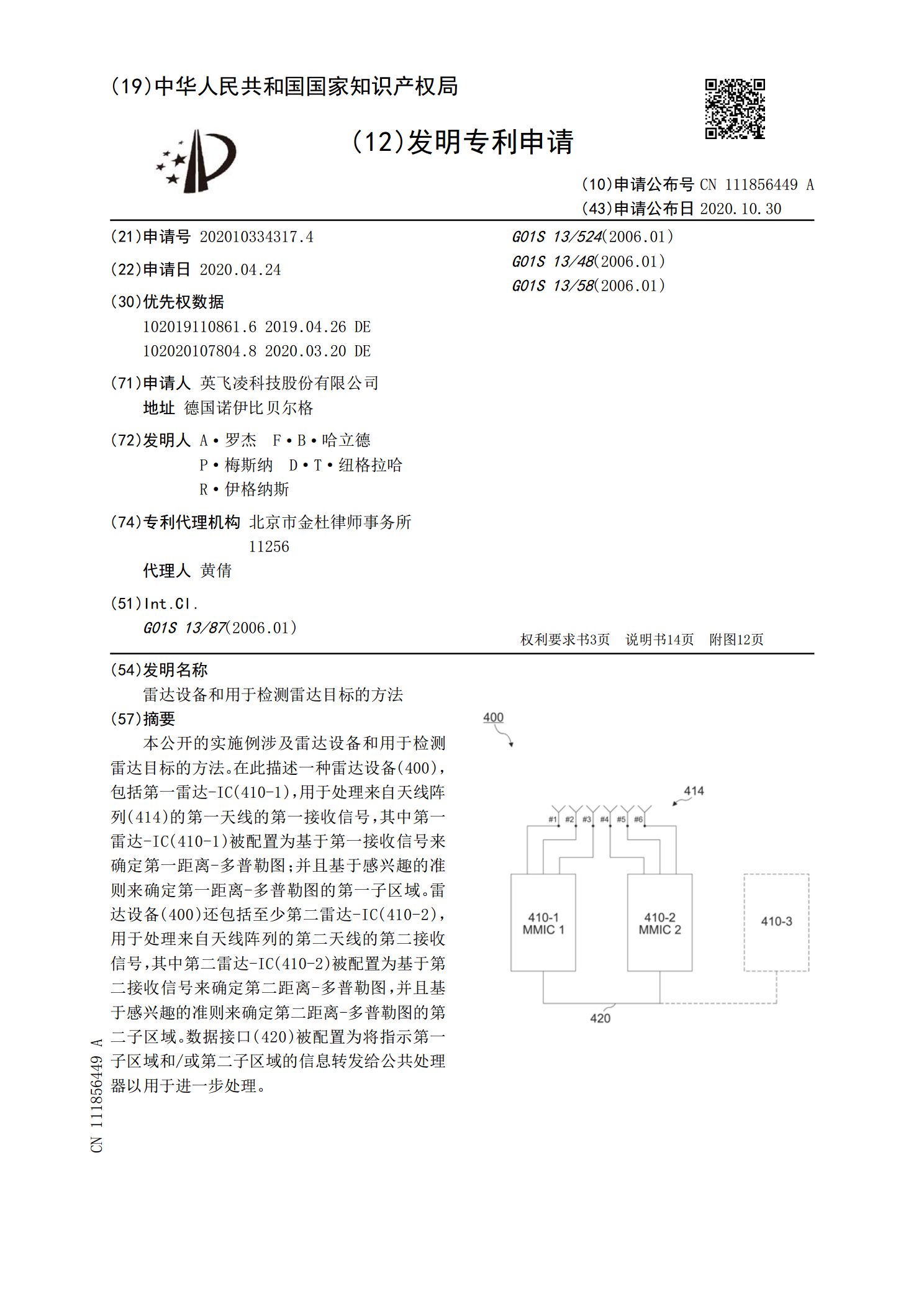
本公开的实施例涉及雷达设备和用于检测雷达目标的方法。在此描述一种雷达设备(400),包括第一雷达‑IC(410‑1),用于处理来自天线阵列(414)的第一天线的第一接收信号,其中第一雷达‑IC(410‑1)被配置为基于第一接收信号来确定第一距离‑多普勒图;并且基于感兴趣的准则来确定第一距离‑多普勒图的第一子区域。雷达设备(400)还包括至少第二雷达‑IC(410‑2),用于处理来自天线阵列的第二天线的第二接收信号,其中第二雷达‑IC(410‑2)被配置为基于第二接收信号来确定第二距离‑多普勒图,并且基于感

一种雷达图像配准方法和系统.pdf
本发明公开了一种雷达图像配准方法和系统,涉及合成孔径雷达领域。该方法包括:根据目标区域的第一图像对目标区域的第二图像进行配准预处理,根据所述第一图像计算配准预处理后的所述第二图像的像素级位移矢量,根据所述第一图像和二维差值算法计算所述第二图像的亚像素级位移矢量,根据所述像素级位移矢量和所述亚像素位移矢量获得所述第二图像的全局位移矢量,通过拟合变换函数结合所述全局位移矢量构建仿射模型,根据所述仿射模型结合三次卷积插值算法获得配准后的第二图像,通过本方案的配准方案实现机载重航过图像的高精度配准。通过对设定成像