
机器人控制系统和机器人控制方法.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人控制系统和机器人控制方法.pdf
本申请提供了一种机器人控制系统,包括:布置在一区域中的多个机器人;产生单元,其将所述区域分割成多个小区域,并且基于表示每个小区域中的机器人的使用概率的值来产生用于指定所述区域中的所述多个机器人中的每一个的布置位置的布置位置信息;以及布置单元,其根据由产生单元产生的布置位置信息来将所述多个机器人布置在所述区域中。
机器人控制系统和机器人控制方法.pdf
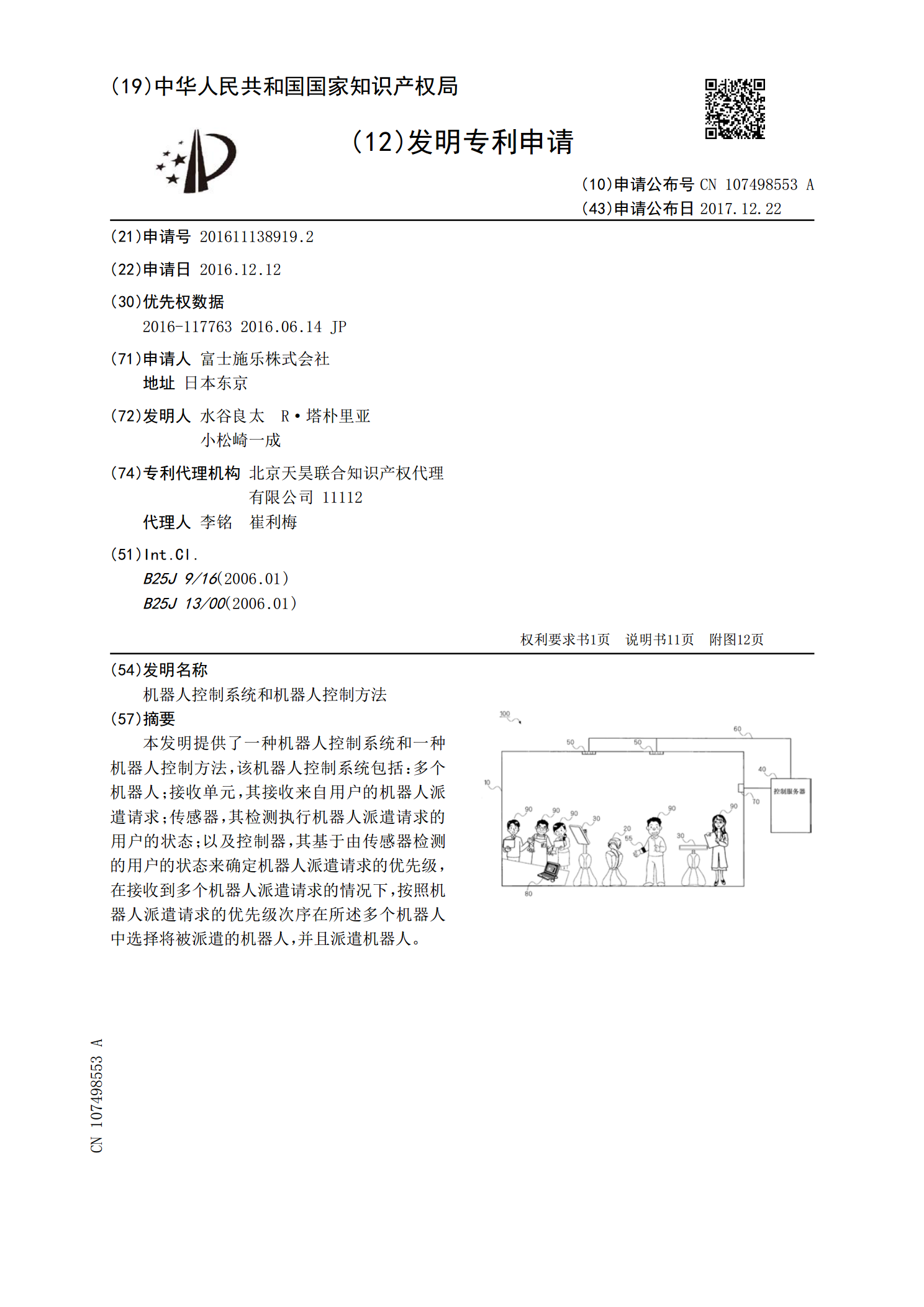
本发明提供了一种机器人控制系统和一种机器人控制方法,该机器人控制系统包括:多个机器人;接收单元,其接收来自用户的机器人派遣请求;传感器,其检测执行机器人派遣请求的用户的状态;以及控制器,其基于由传感器检测的用户的状态来确定机器人派遣请求的优先级,在接收到多个机器人派遣请求的情况下,按照机器人派遣请求的优先级次序在所述多个机器人中选择将被派遣的机器人,并且派遣机器人。

机器人控制系统和方法.pdf
本申请涉及一种机器人控制系统和方法。所述方法包括:建立数据采集设备与手术机器人之间的相对位置关系;通过所述数据采集设备对所述手术环境进行多次数据采集,得到所述手术环境在采集设备坐标系下的多个部分环境数据;根据所述数据采集设备与手术机器人之间的相对位置关系和所述手术环境在采集设备坐标系下的多个部分环境数据,确定所述手术环境在机器人坐标系下的多个部分环境数据;根据所述手术环境在机器人坐标系下的多个部分环境数据,构建所述手术环境在机器人坐标系下的整体环境数据;其中,所述整体环境数据包括所述手术环境中多个对象的空
机器人控制系统、机器人控制方法和存储介质.pdf
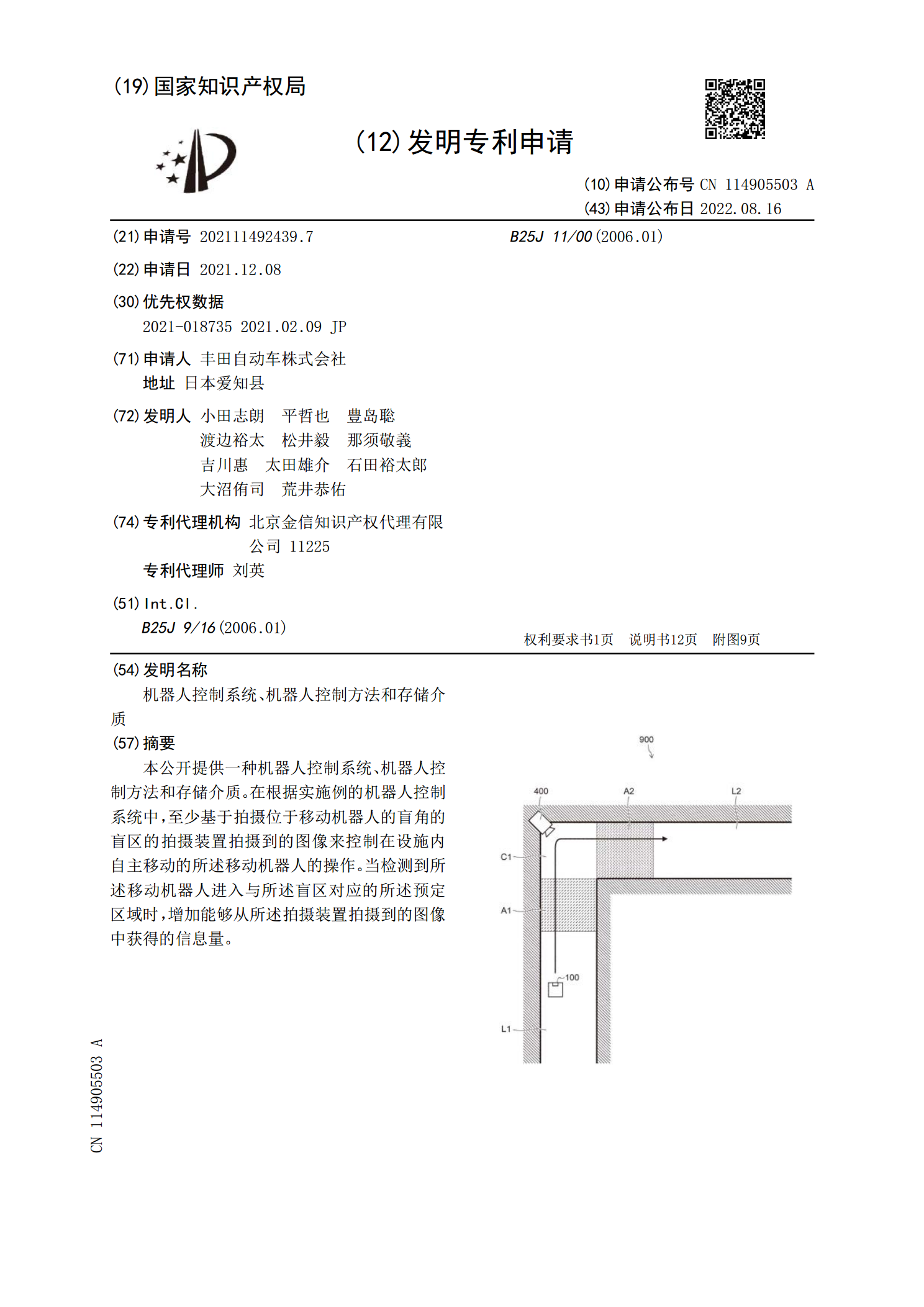
本公开提供一种机器人控制系统、机器人控制方法和存储介质。在根据实施例的机器人控制系统中,至少基于拍摄位于移动机器人的盲角的盲区的拍摄装置拍摄到的图像来控制在设施内自主移动的所述移动机器人的操作。当检测到所述移动机器人进入与所述盲区对应的所述预定区域时,增加能够从所述拍摄装置拍摄到的图像中获得的信息量。
机器人的控制方法、机器人、控制终端和控制系统.pdf
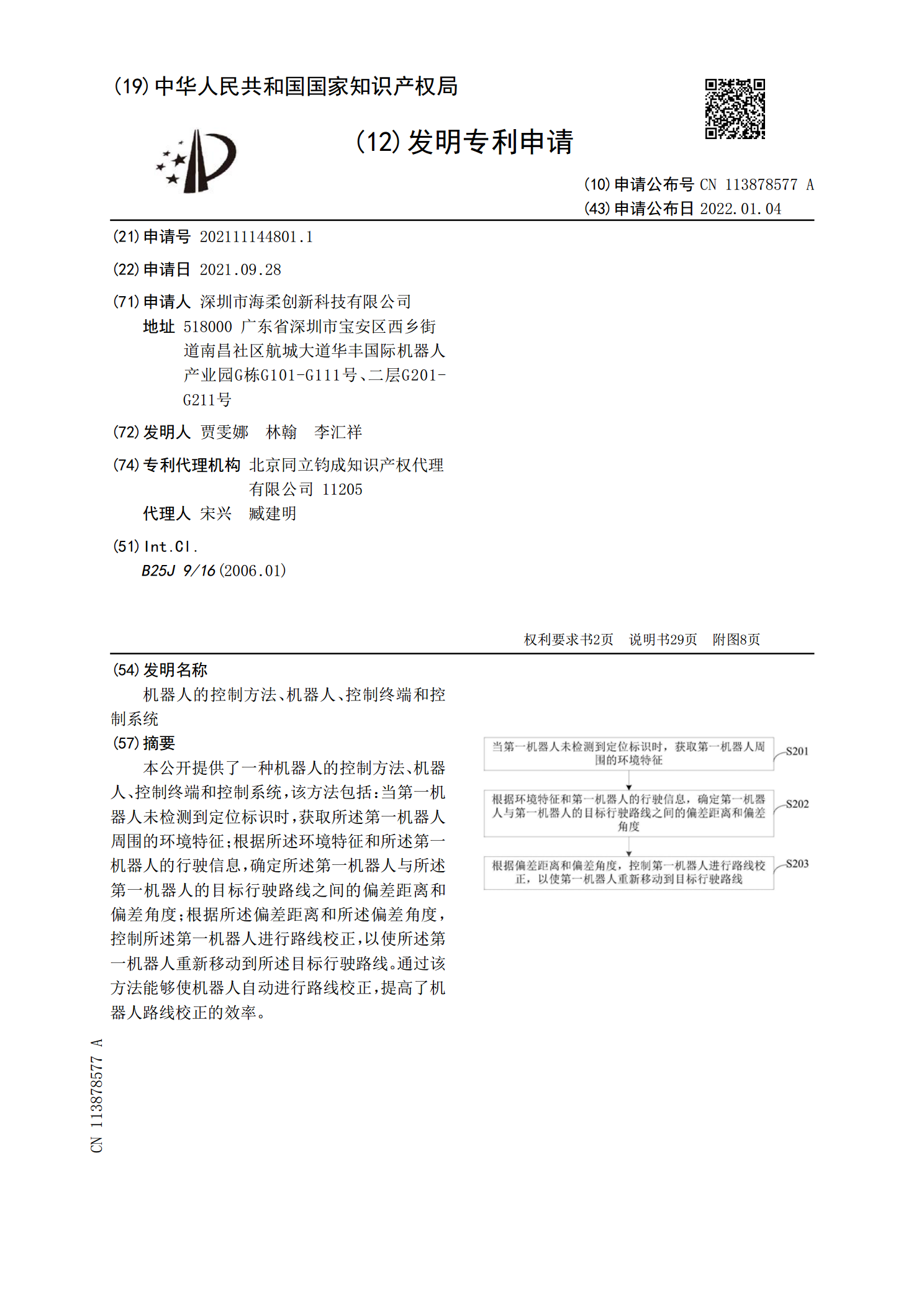
本公开提供了一种机器人的控制方法、机器人、控制终端和控制系统,该方法包括:当第一机器人未检测到定位标识时,获取所述第一机器人周围的环境特征;根据所述环境特征和所述第一机器人的行驶信息,确定所述第一机器人与所述第一机器人的目标行驶路线之间的偏差距离和偏差角度;根据所述偏差距离和所述偏差角度,控制所述第一机器人进行路线校正,以使所述第一机器人重新移动到所述目标行驶路线。通过该方法能够使机器人自动进行路线校正,提高了机器人路线校正的效率。