
一种纸箱垛拆盘系统视觉定位装置.pdf

书生****35

1/5

2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种纸箱垛拆盘系统视觉定位装置.pdf
本发明公开了一种纸箱垛拆盘系统视觉定位装置,具有:机器人模块和视觉定位模块;机器人模块包括拆垛机器手;视觉定位模块具有:工业相机,拍摄待拆垛位的垛型和物料平面位置信息;位移传感器,设置在拆垛机器手上,用于获取拆垛机器手到物料平面的距离信息;工控机,与拆垛机器手、工业相机和位移传感器通过电路连接,接收来自工业相机和位移传感器的数据,并控制拆垛机器手运动,能够快速准确检测定位待拆垛上物料,提高作业效率、降低人力成本。

三维视觉引导拆垛系统.pdf
本发明公开了三维视觉引导拆垛系统,包括车厢、纸箱剖面、AGV小车、激光雷达、三维传感器和彩色相机,AGV小车上的三维激光传感器对集装箱边缘进行三维成像。本发明针对国际物流中最常见的纸箱包装,研究了一种基于三维视觉引导的拆垛系统,通过三维视觉对目标进行定位,引导卸货机构准确到达目标位置。通过大尺寸吸盘阵列,一次性实现多个纸箱的抓取,兼顾效率的同时保证了抓取的成功率,实现纸箱的自动化拆垛。
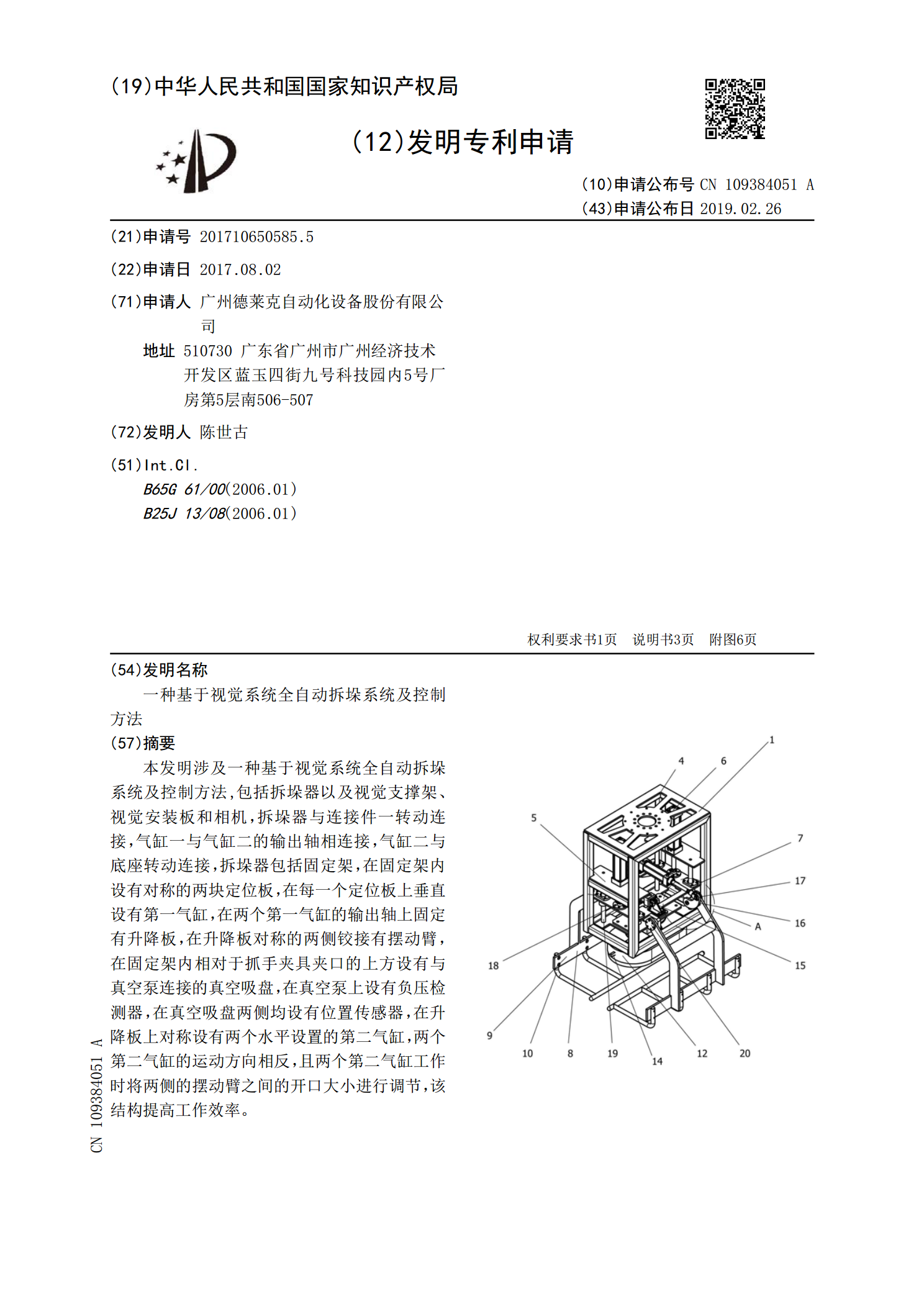
一种基于视觉系统全自动拆垛系统及控制方法.pdf
本发明涉及一种基于视觉系统全自动拆垛系统及控制方法,包括拆垛器以及视觉支撑架、视觉安装板和相机,拆垛器与连接件一转动连接,气缸一与气缸二的输出轴相连接,气缸二与底座转动连接,拆垛器包括固定架,在固定架内设有对称的两块定位板,在每一个定位板上垂直设有第一气缸,在两个第一气缸的输出轴上固定有升降板,在升降板对称的两侧铰接有摆动臂,在固定架内相对于抓手夹具夹口的上方设有与真空泵连接的真空吸盘,在真空泵上设有负压检测器,在真空吸盘两侧均设有位置传感器,在升降板上对称设有两个水平设置的第二气缸,两个第二气缸的运动方
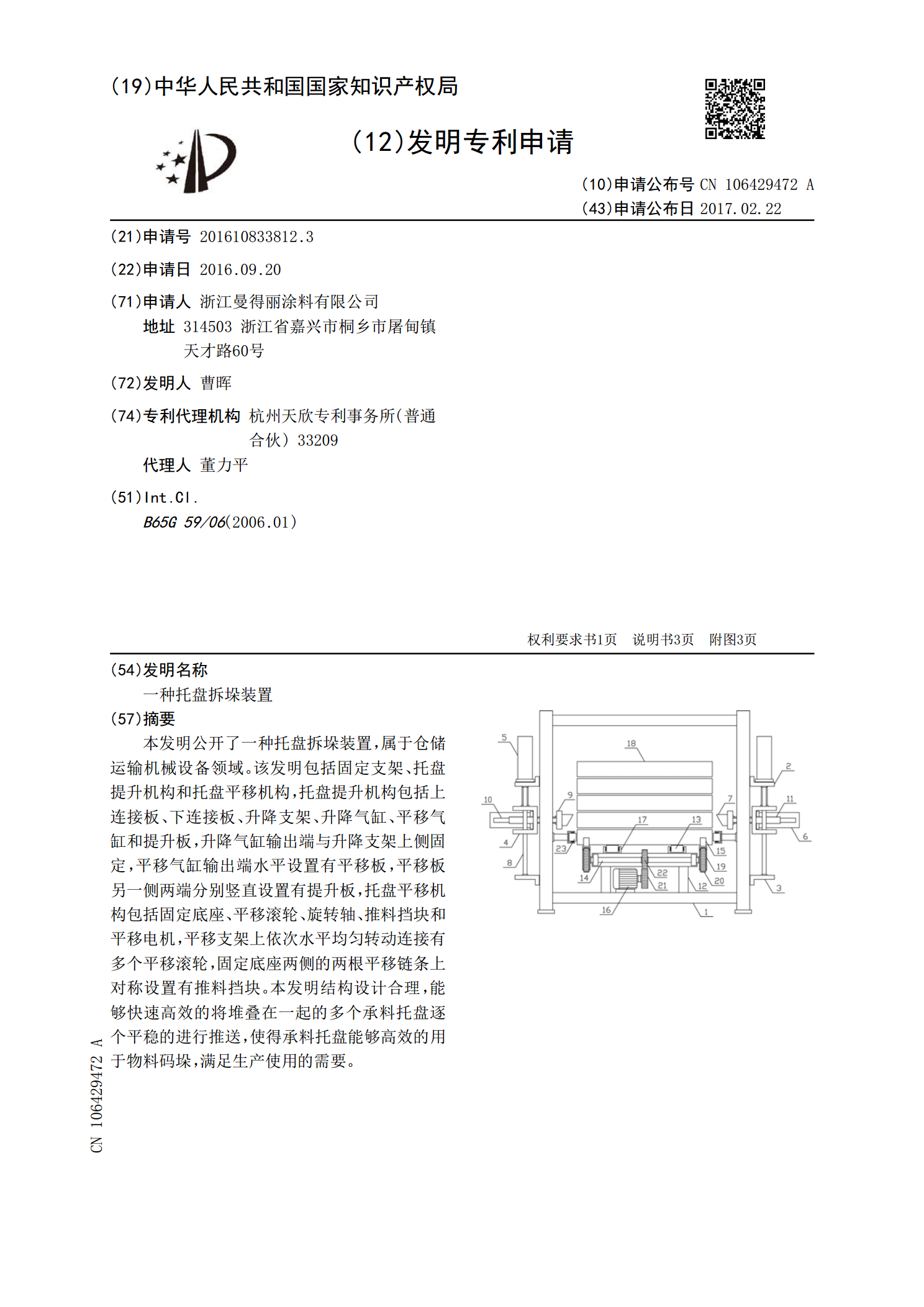
一种托盘拆垛装置.pdf
本发明公开了一种托盘拆垛装置,属于仓储运输机械设备领域。该发明包括固定支架、托盘提升机构和托盘平移机构,托盘提升机构包括上连接板、下连接板、升降支架、升降气缸、平移气缸和提升板,升降气缸输出端与升降支架上侧固定,平移气缸输出端水平设置有平移板,平移板另一侧两端分别竖直设置有提升板,托盘平移机构包括固定底座、平移滚轮、旋转轴、推料挡块和平移电机,平移支架上依次水平均匀转动连接有多个平移滚轮,固定底座两侧的两根平移链条上对称设置有推料挡块。本发明结构设计合理,能够快速高效的将堆叠在一起的多个承料托盘逐个平稳的
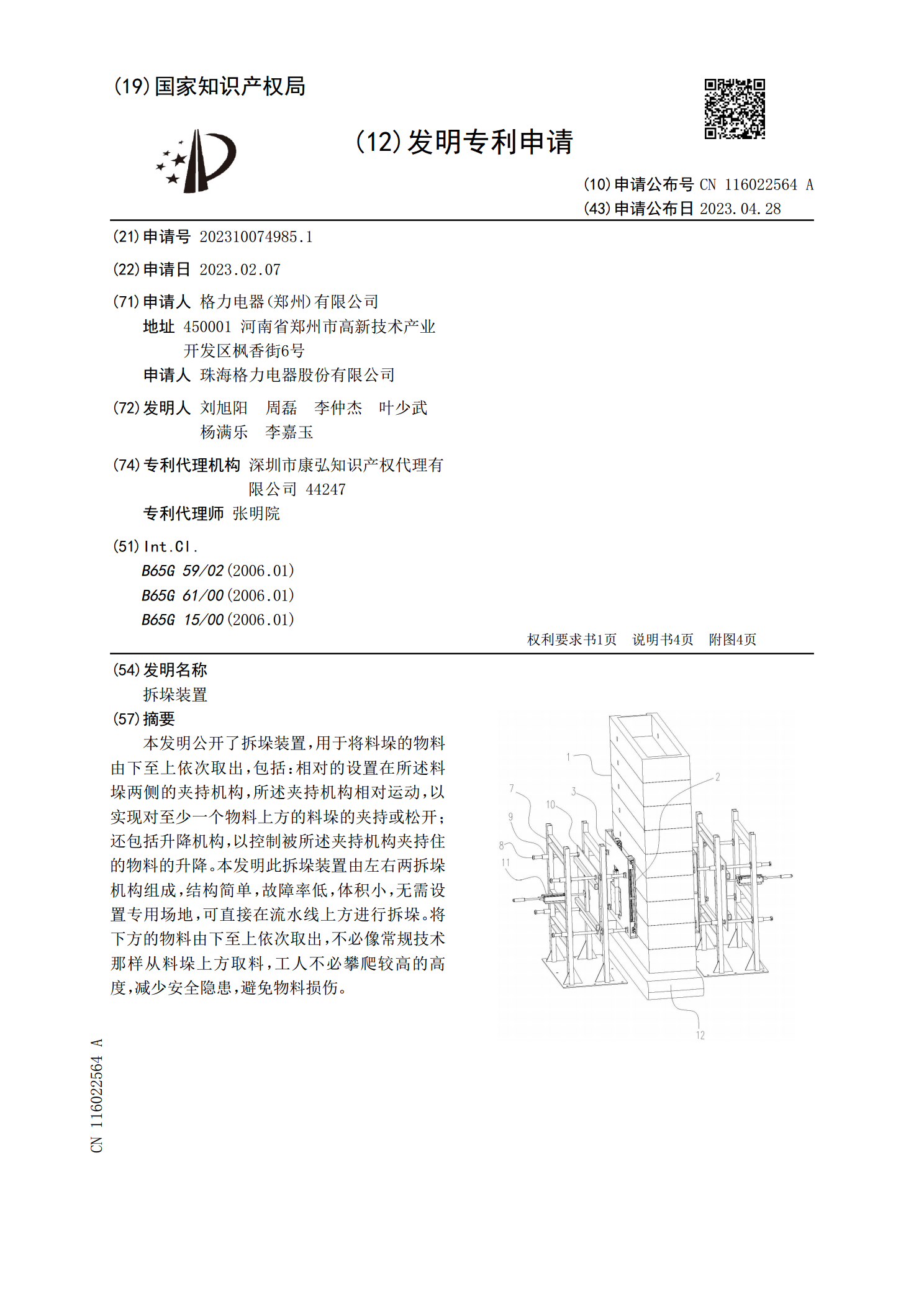
拆垛装置.pdf
本发明公开了拆垛装置,用于将料垛的物料由下至上依次取出,包括:相对的设置在所述料垛两侧的夹持机构,所述夹持机构相对运动,以实现对至少一个物料上方的料垛的夹持或松开;还包括升降机构,以控制被所述夹持机构夹持住的物料的升降。本发明此拆垛装置由左右两拆垛机构组成,结构简单,故障率低,体积小,无需设置专用场地,可直接在流水线上方进行拆垛。将下方的物料由下至上依次取出,不必像常规技术那样从料垛上方取料,工人不必攀爬较高的高度,减少安全隐患,避免物料损伤。