
一种基于视觉系统全自动拆垛系统及控制方法.pdf

努力****采萍


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉系统全自动拆垛系统及控制方法.pdf
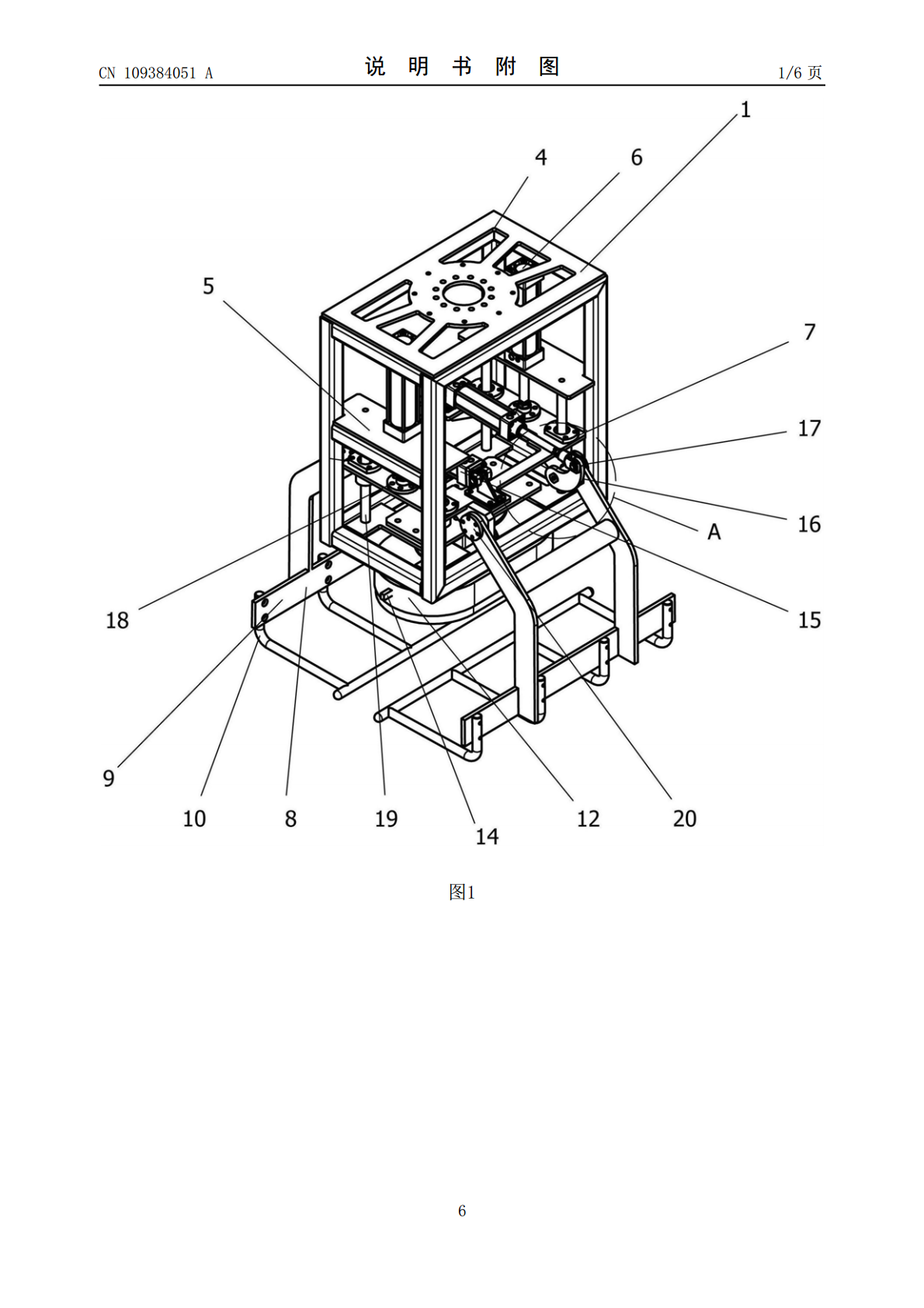
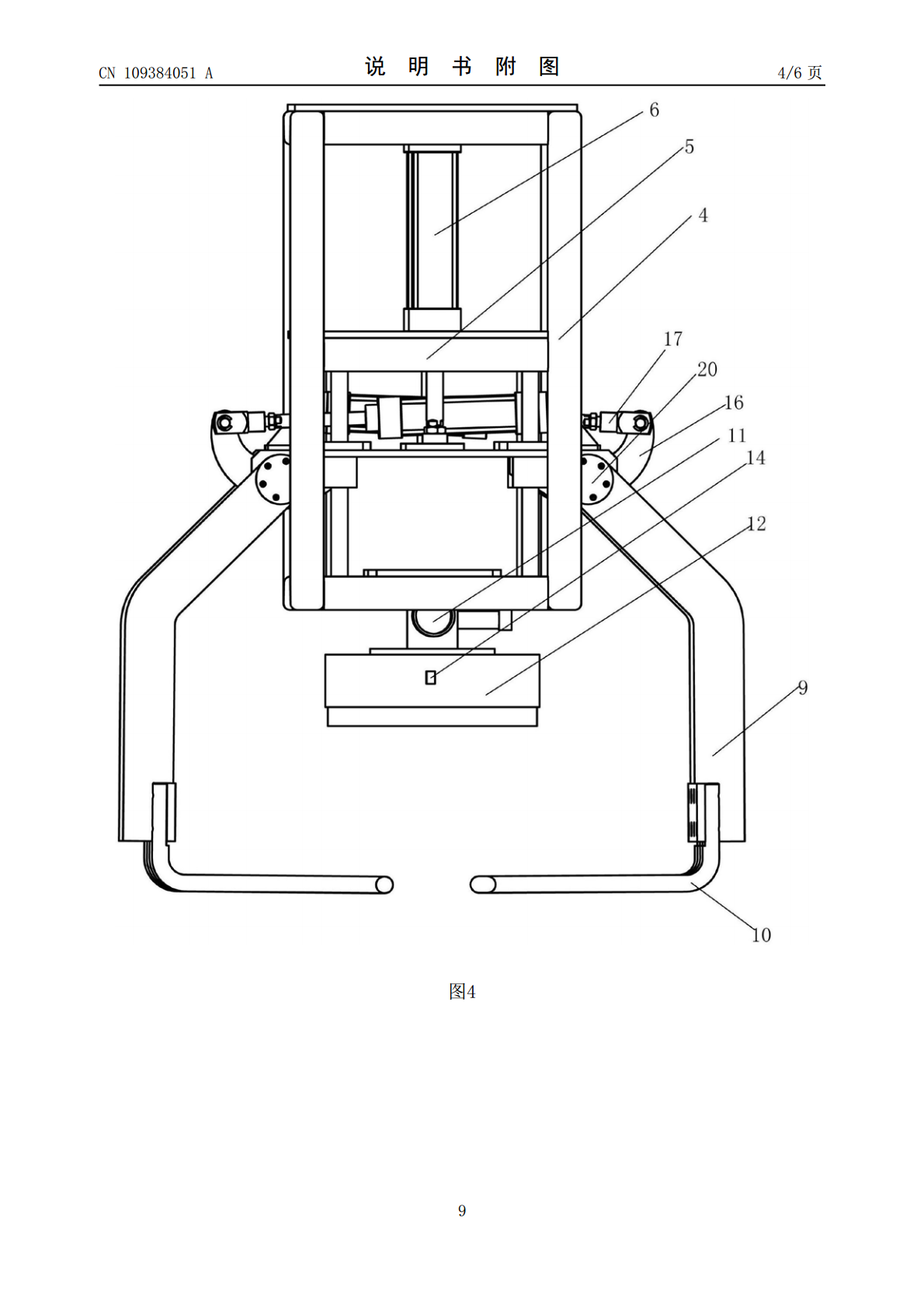
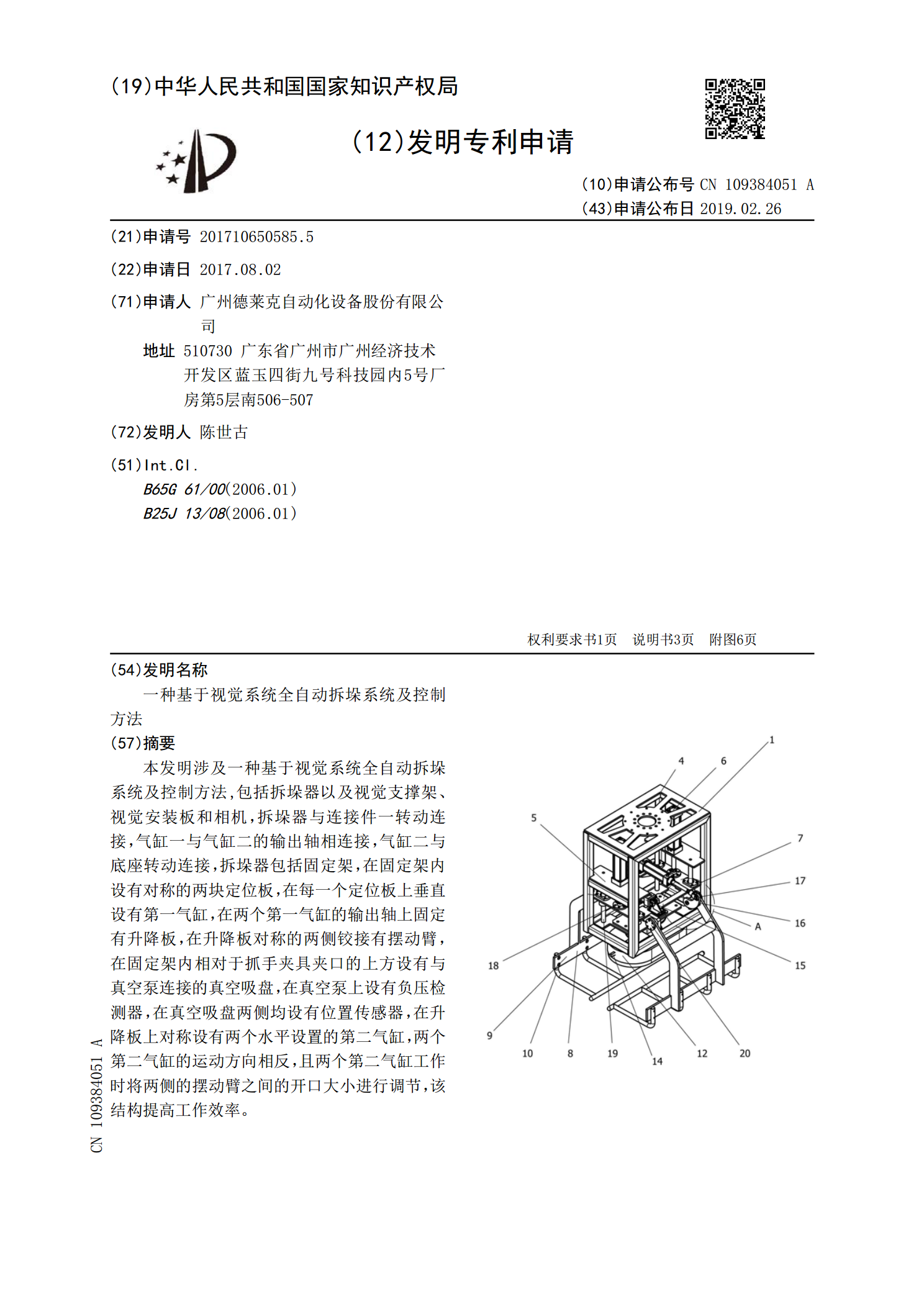
本发明涉及一种基于视觉系统全自动拆垛系统及控制方法,包括拆垛器以及视觉支撑架、视觉安装板和相机,拆垛器与连接件一转动连接,气缸一与气缸二的输出轴相连接,气缸二与底座转动连接,拆垛器包括固定架,在固定架内设有对称的两块定位板,在每一个定位板上垂直设有第一气缸,在两个第一气缸的输出轴上固定有升降板,在升降板对称的两侧铰接有摆动臂,在固定架内相对于抓手夹具夹口的上方设有与真空泵连接的真空吸盘,在真空泵上设有负压检测器,在真空吸盘两侧均设有位置传感器,在升降板上对称设有两个水平设置的第二气缸,两个第二气缸的运动方
全自动拆垛系统.pdf
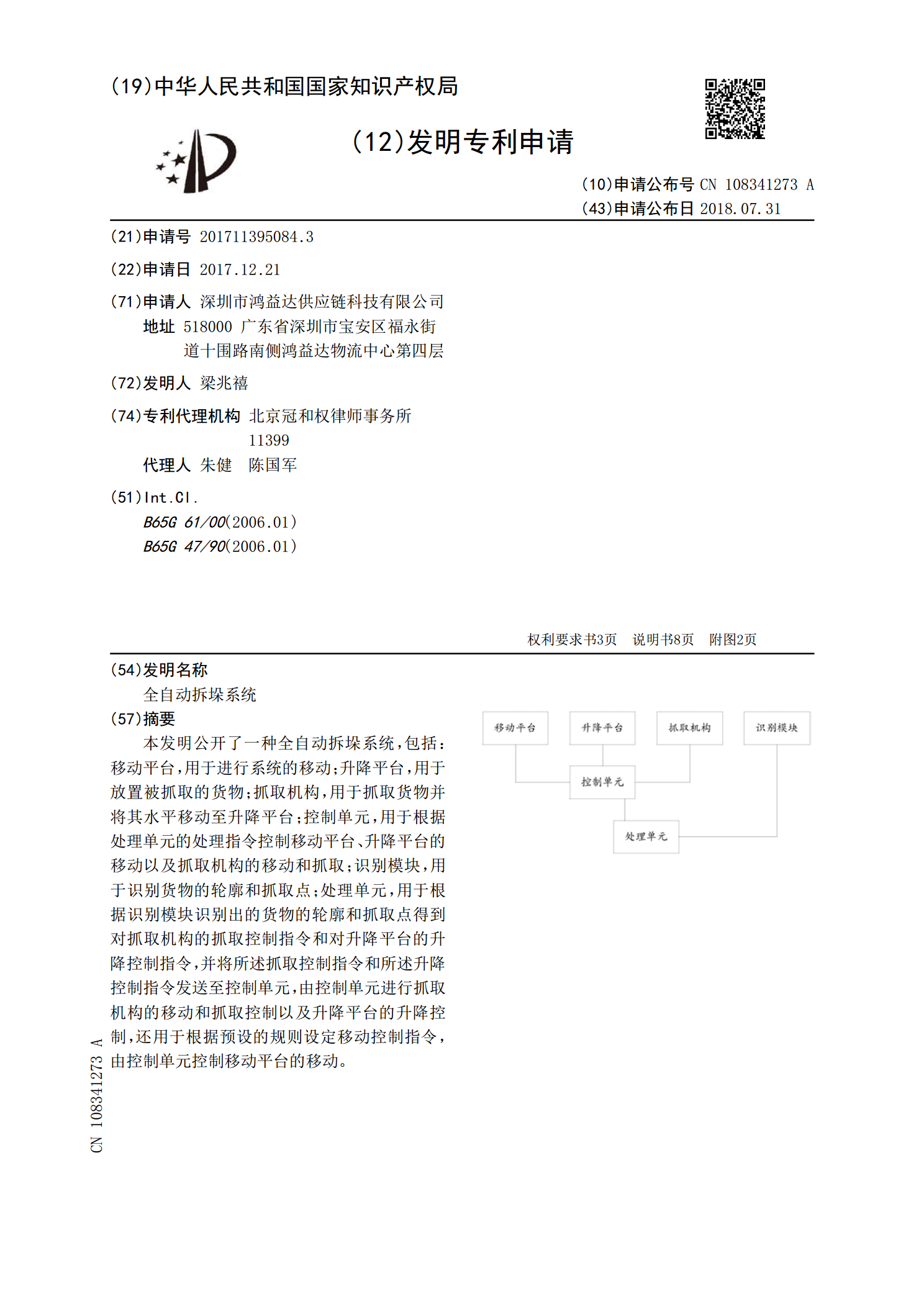
本发明公开了一种全自动拆垛系统,包括:移动平台,用于进行系统的移动;升降平台,用于放置被抓取的货物;抓取机构,用于抓取货物并将其水平移动至升降平台;控制单元,用于根据处理单元的处理指令控制移动平台、升降平台的移动以及抓取机构的移动和抓取;识别模块,用于识别货物的轮廓和抓取点;处理单元,用于根据识别模块识别出的货物的轮廓和抓取点得到对抓取机构的抓取控制指令和对升降平台的升降控制指令,并将所述抓取控制指令和所述升降控制指令发送至控制单元,由控制单元进行抓取机构的移动和抓取控制以及升降平台的升降控制,还用于根据
一种全自动拆垛拆包系统.pdf
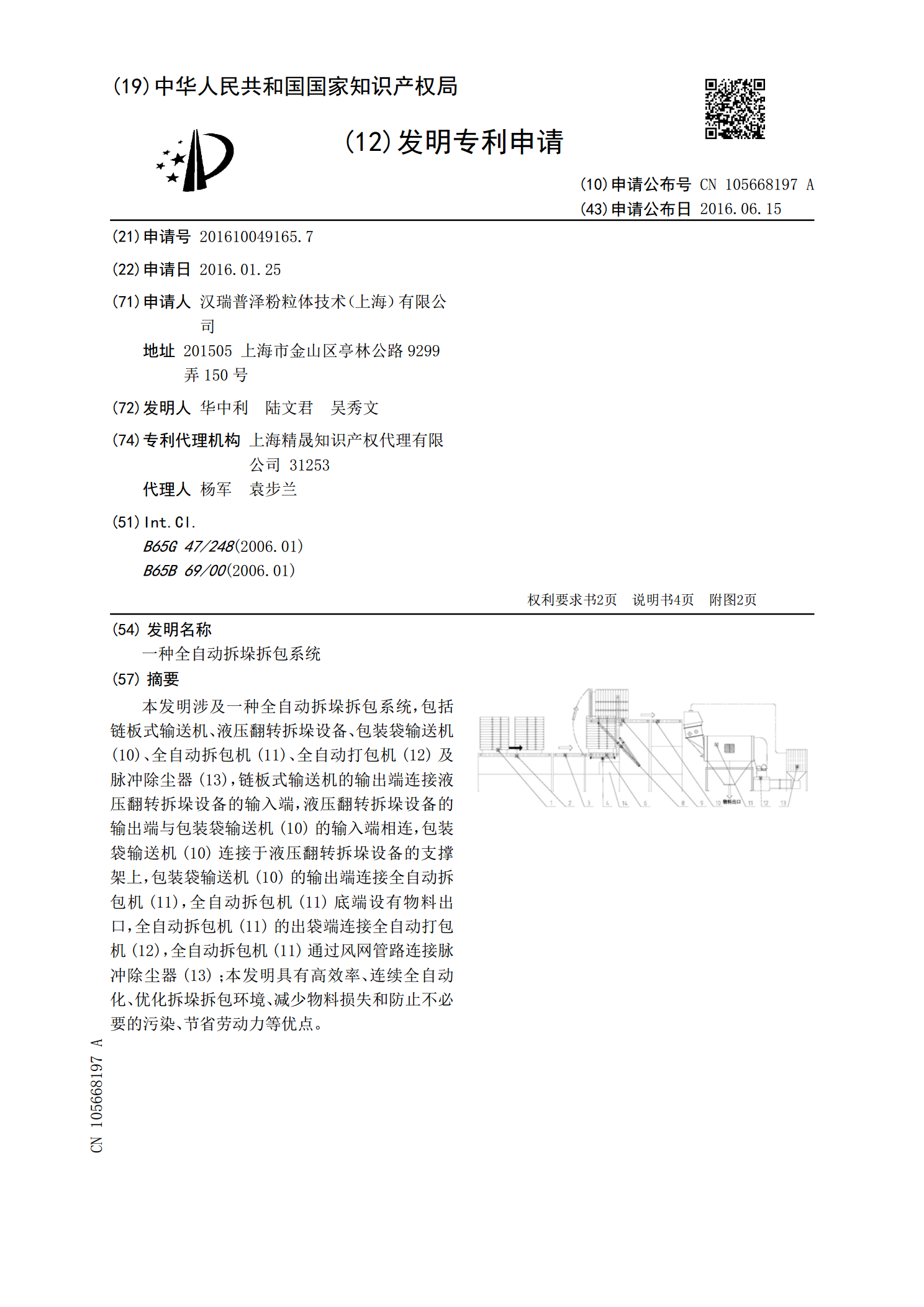
本发明涉及一种全自动拆垛拆包系统,包括链板式输送机、液压翻转拆垛设备、包装袋输送机(10)、全自动拆包机(11)、全自动打包机(12)及脉冲除尘器(13),链板式输送机的输出端连接液压翻转拆垛设备的输入端,液压翻转拆垛设备的输出端与包装袋输送机(10)的输入端相连,包装袋输送机(10)连接于液压翻转拆垛设备的支撑架上,包装袋输送机(10)的输出端连接全自动拆包机(11),全自动拆包机(11)底端设有物料出口,全自动拆包机(11)的出袋端连接全自动打包机(12),全自动拆包机(11)通过风网管路连接脉冲除尘
盲拆拆垛方法及系统.pdf
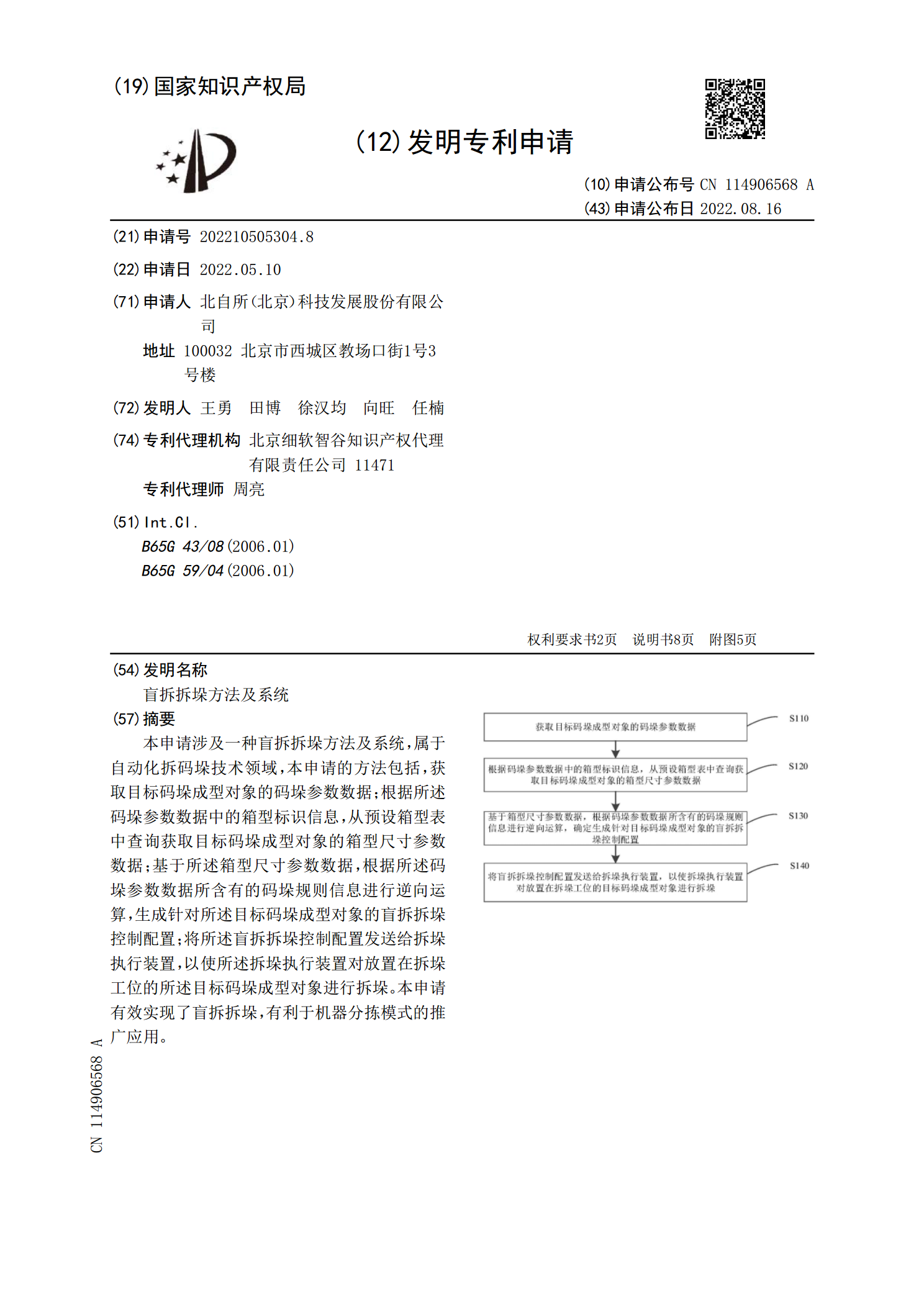
本申请涉及一种盲拆拆垛方法及系统,属于自动化拆码垛技术领域,本申请的方法包括,获取目标码垛成型对象的码垛参数数据;根据所述码垛参数数据中的箱型标识信息,从预设箱型表中查询获取目标码垛成型对象的箱型尺寸参数数据;基于所述箱型尺寸参数数据,根据所述码垛参数数据所含有的码垛规则信息进行逆向运算,生成针对所述目标码垛成型对象的盲拆拆垛控制配置;将所述盲拆拆垛控制配置发送给拆垛执行装置,以使所述拆垛执行装置对放置在拆垛工位的所述目标码垛成型对象进行拆垛。本申请有效实现了盲拆拆垛,有利于机器分拣模式的推广应用。
一种纸箱垛拆盘系统视觉定位装置.pdf
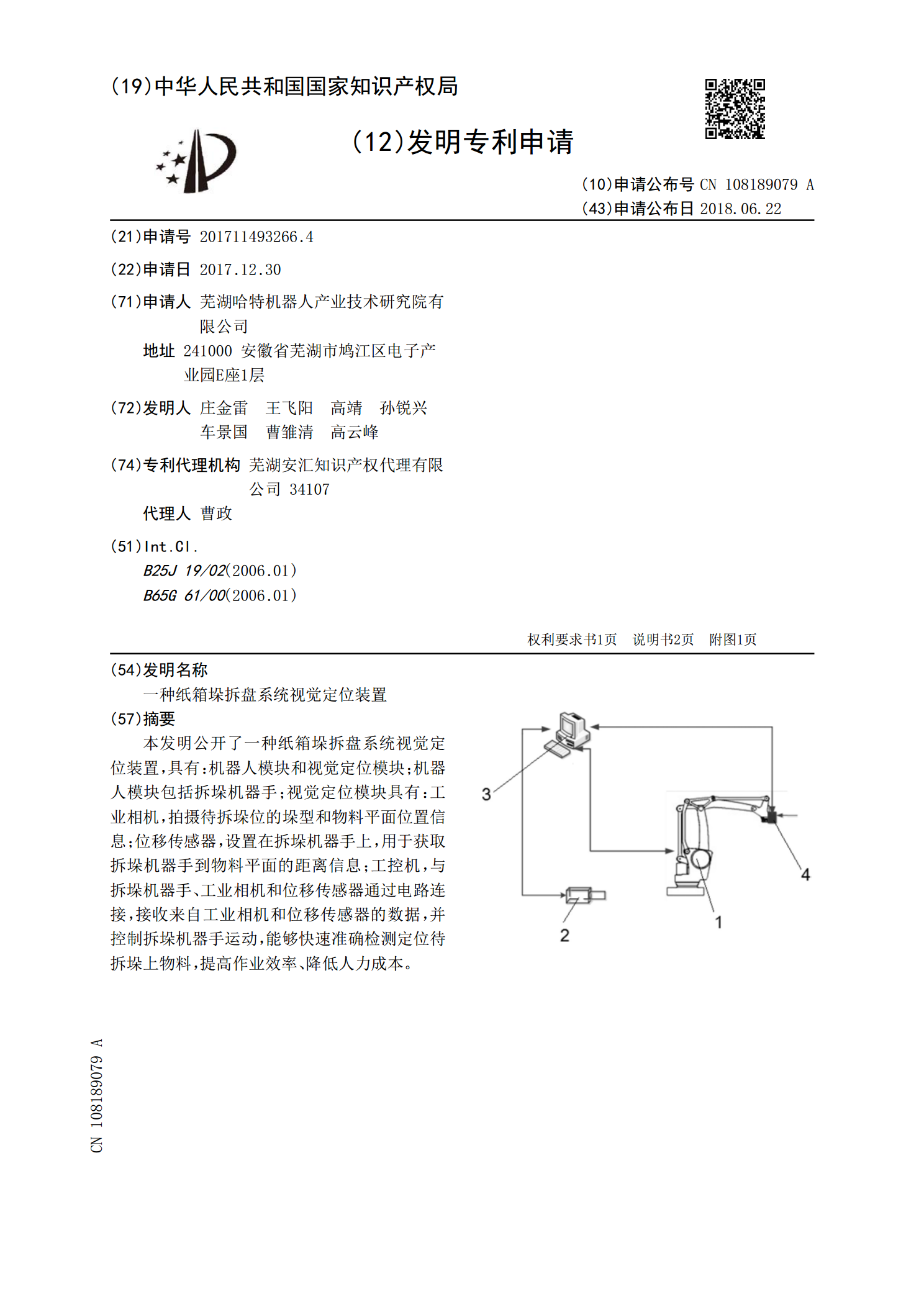
本发明公开了一种纸箱垛拆盘系统视觉定位装置,具有:机器人模块和视觉定位模块;机器人模块包括拆垛机器手;视觉定位模块具有:工业相机,拍摄待拆垛位的垛型和物料平面位置信息;位移传感器,设置在拆垛机器手上,用于获取拆垛机器手到物料平面的距离信息;工控机,与拆垛机器手、工业相机和位移传感器通过电路连接,接收来自工业相机和位移传感器的数据,并控制拆垛机器手运动,能够快速准确检测定位待拆垛上物料,提高作业效率、降低人力成本。