
一种工业夹取机器人用安装旋转底座.pdf

一只****iu

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业夹取机器人用安装旋转底座.pdf
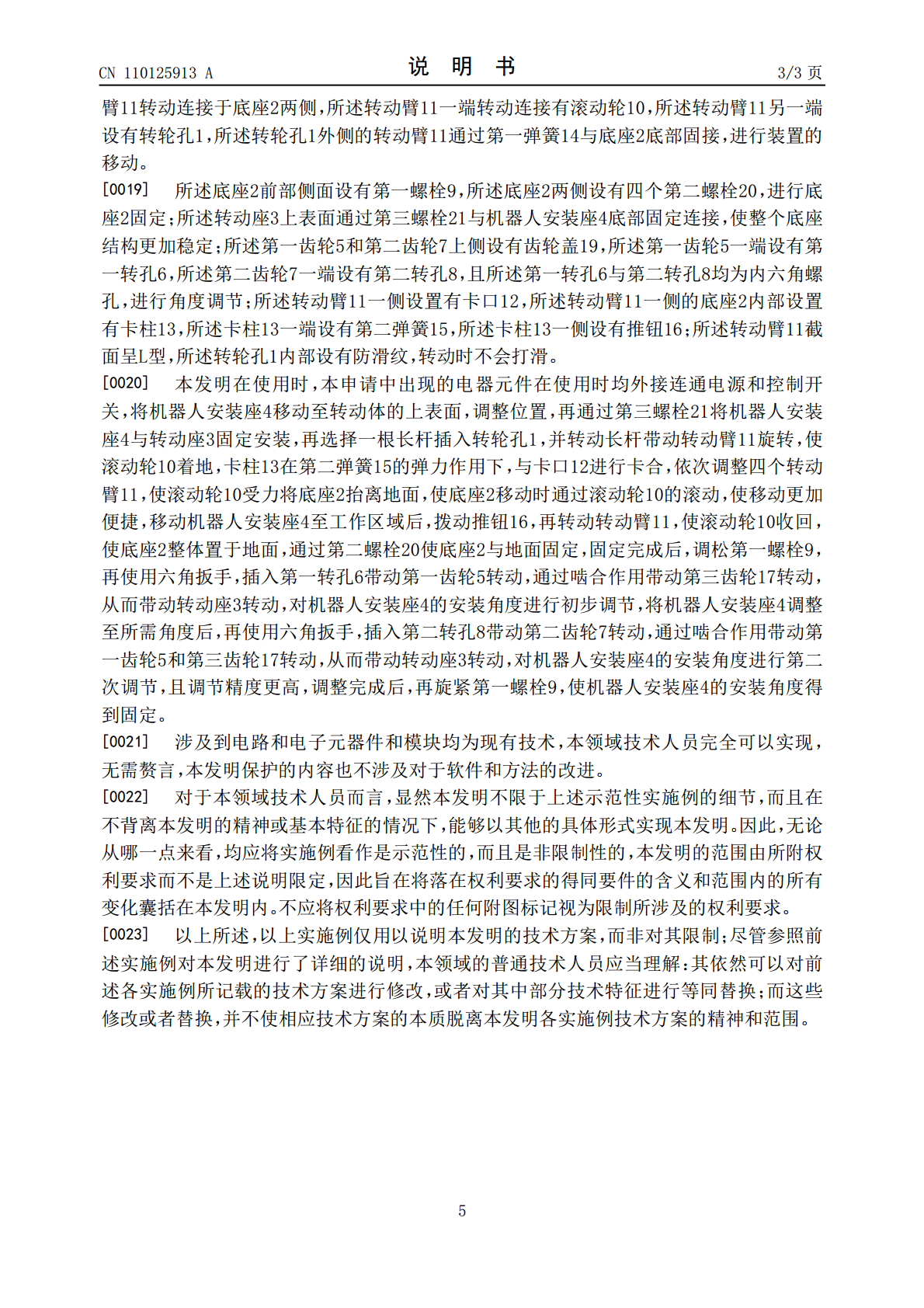
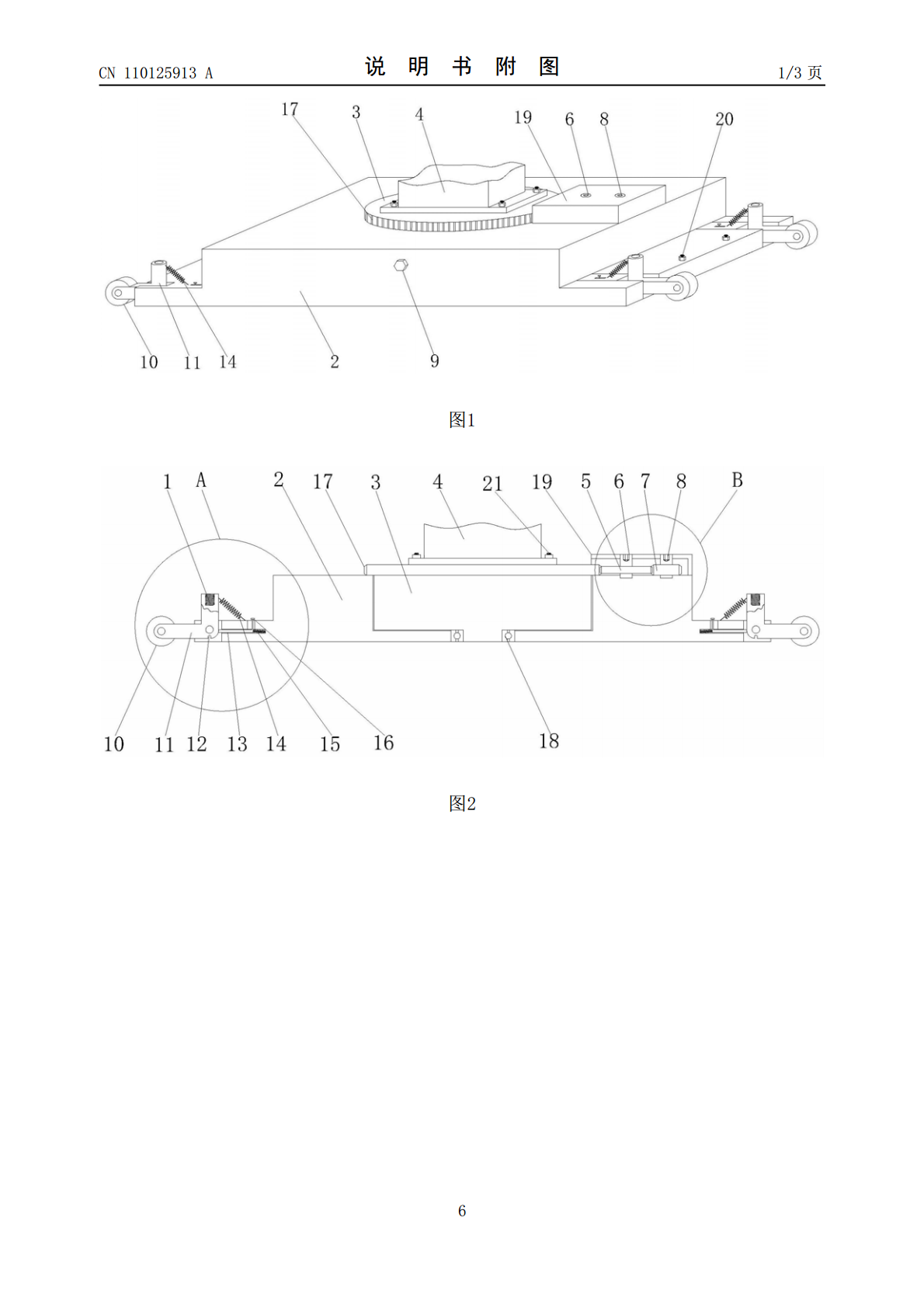
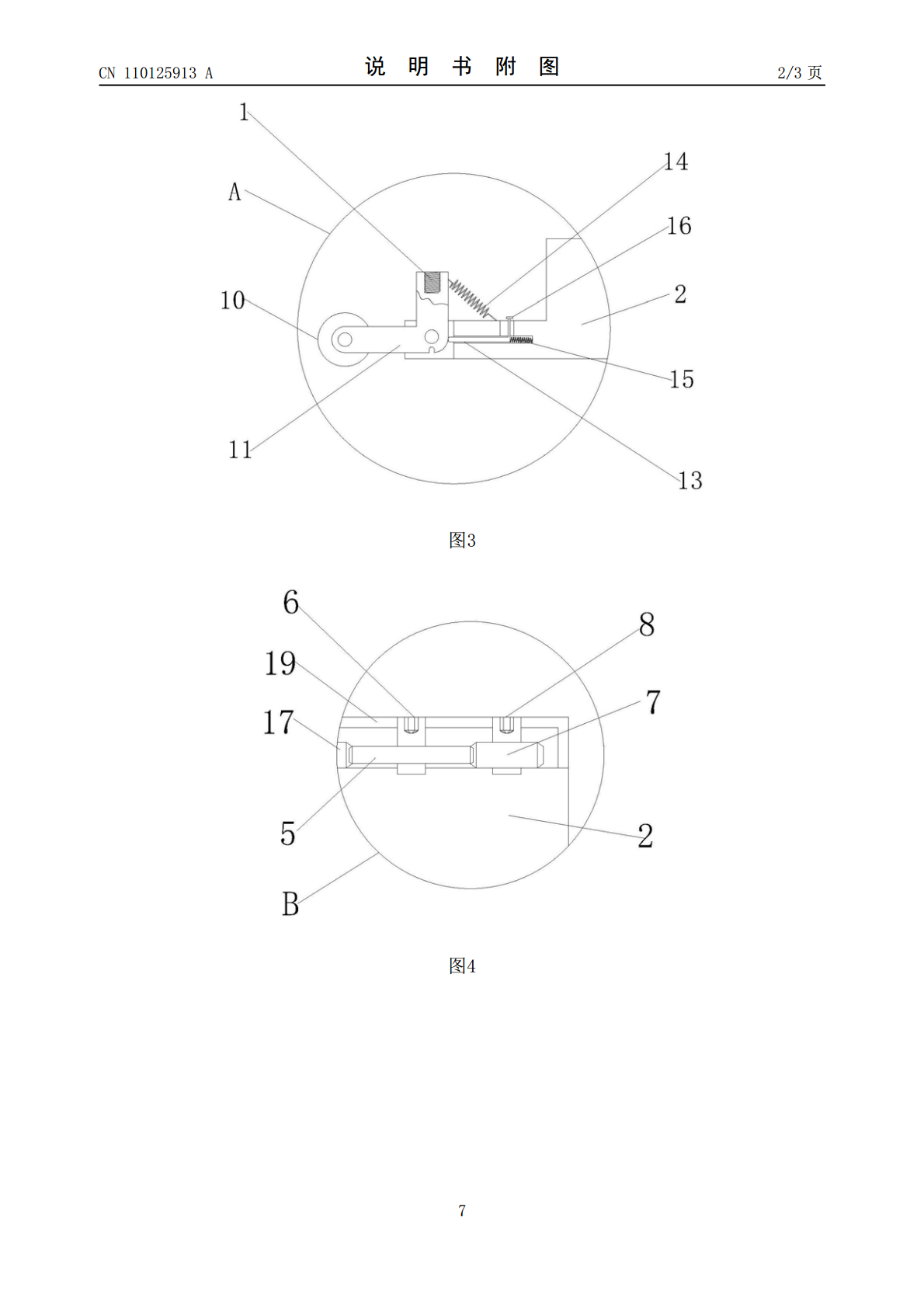
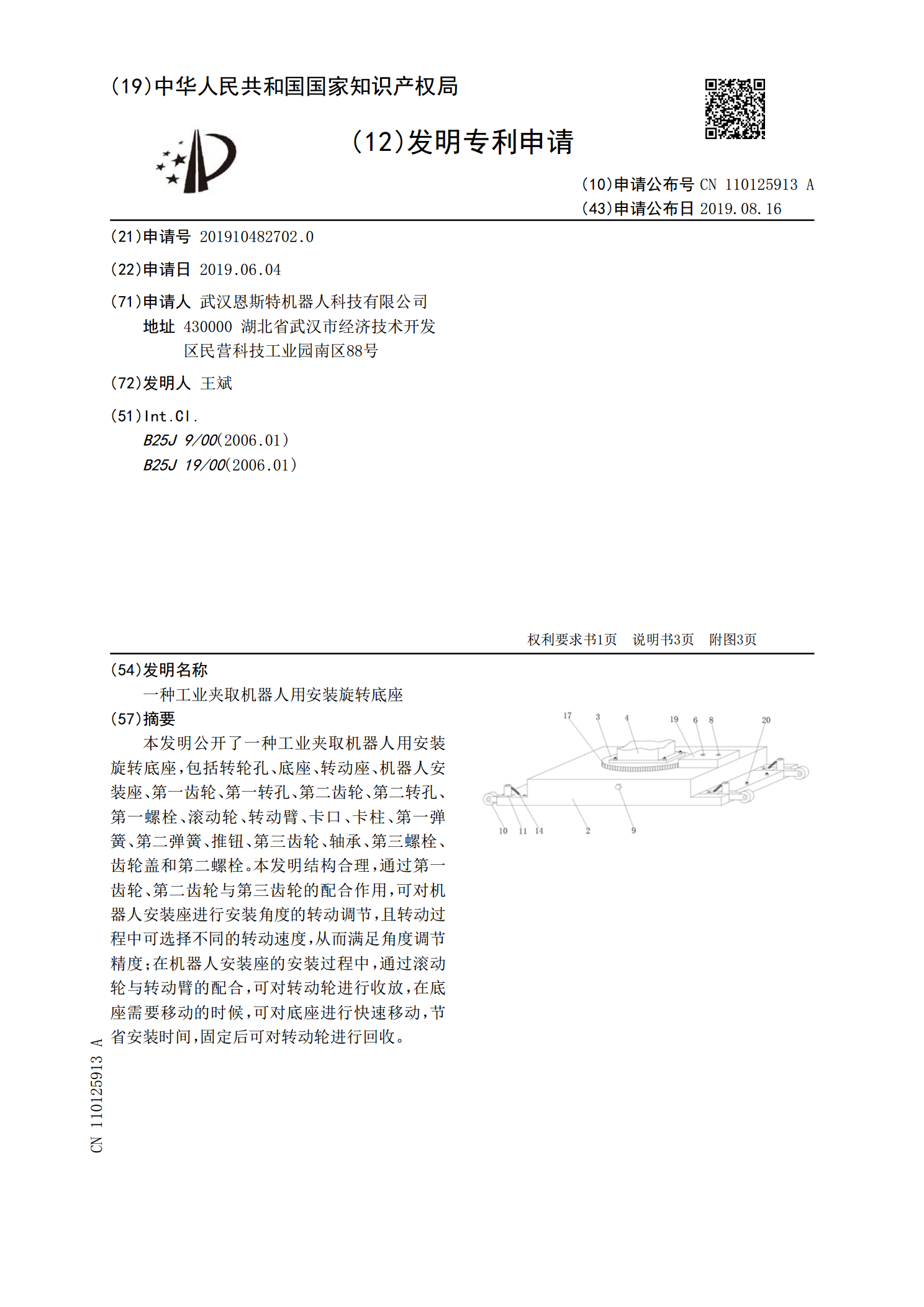
本发明公开了一种工业夹取机器人用安装旋转底座,包括转轮孔、底座、转动座、机器人安装座、第一齿轮、第一转孔、第二齿轮、第二转孔、第一螺栓、滚动轮、转动臂、卡口、卡柱、第一弹簧、第二弹簧、推钮、第三齿轮、轴承、第三螺栓、齿轮盖和第二螺栓。本发明结构合理,通过第一齿轮、第二齿轮与第三齿轮的配合作用,可对机器人安装座进行安装角度的转动调节,且转动过程中可选择不同的转动速度,从而满足角度调节精度;在机器人安装座的安装过程中,通过滚动轮与转动臂的配合,可对转动轮进行收放,在底座需要移动的时候,可对底座进行快速移动,节

一种工业机器人用安装底座.pdf
本发明公开了一种工业机器人用安装底座,包括装置座、支撑板、底板、安装板、第一安装孔、卡块、支撑筒、固定螺栓、顶座、卡槽、电源接线、橡胶垫、通风孔、电机、电机轴、驱动齿轮、轴承、电机槽、螺纹孔、齿轮槽和第二安装孔。本发明的有益效果是:通过在支撑筒顶部设置能够进行转动的顶座,且在装置座内部设置带有驱动齿轮的电机,使得顶座能够通过电机进行驱动,从而进行转动,增加机器人的工作范围,通过在支撑筒边缘安装固定螺栓,且在装置座边缘设置螺纹孔,使得支撑筒安装拆卸更方便,便于维修和更换部件,通过在支撑筒中部设置若干通风孔,
一种工业机器人用安装底座.pdf
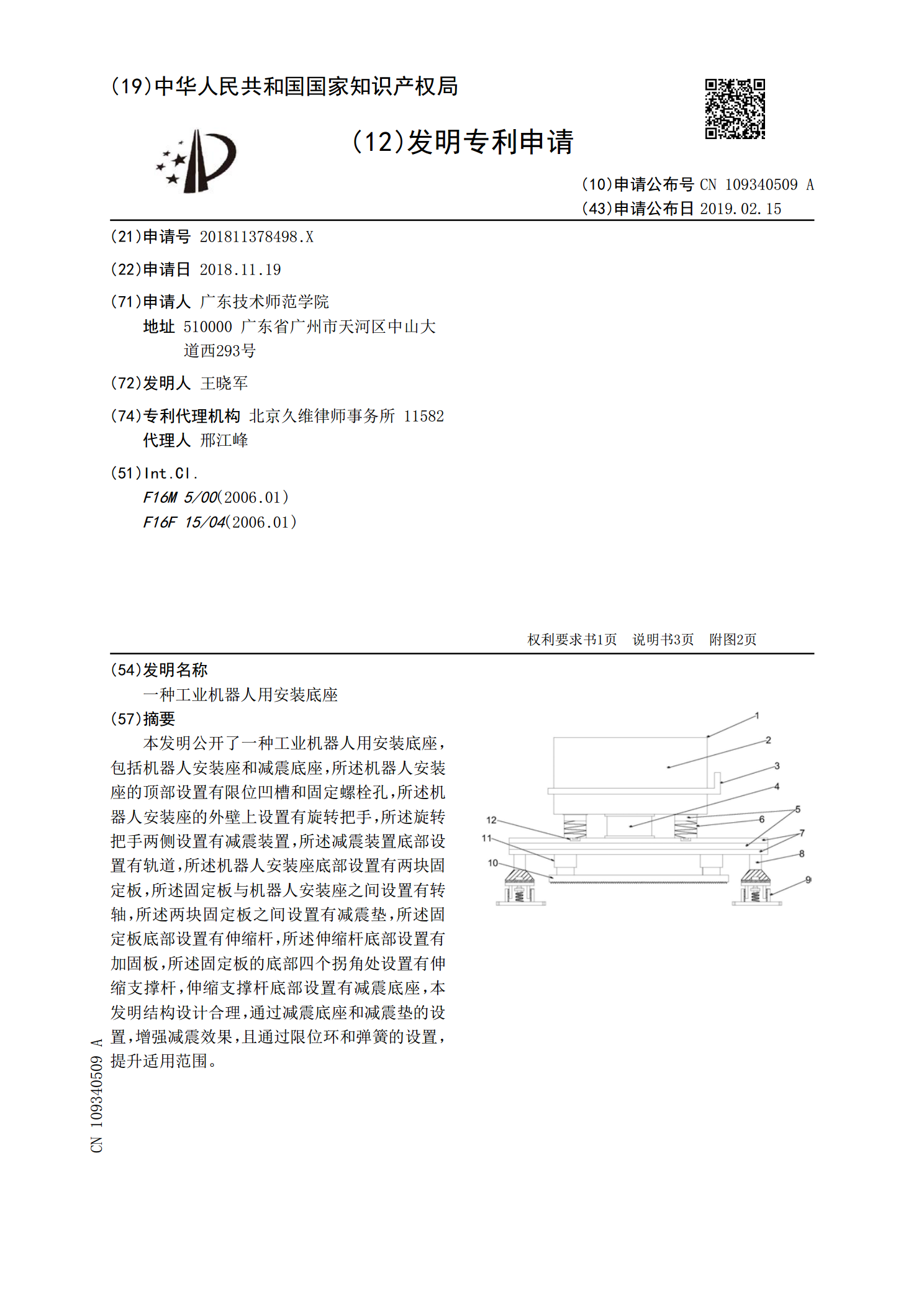
本发明公开了一种工业机器人用安装底座,包括机器人安装座和减震底座,所述机器人安装座的顶部设置有限位凹槽和固定螺栓孔,所述机器人安装座的外壁上设置有旋转把手,所述旋转把手两侧设置有减震装置,所述减震装置底部设置有轨道,所述机器人安装座底部设置有两块固定板,所述固定板与机器人安装座之间设置有转轴,所述两块固定板之间设置有减震垫,所述固定板底部设置有伸缩杆,所述伸缩杆底部设置有加固板,所述固定板的底部四个拐角处设置有伸缩支撑杆,伸缩支撑杆底部设置有减震底座,本发明结构设计合理,通过减震底座和减震垫的设置,增强减

一种工业机器人的旋转底座.pdf
本发明公开了一种工业机器人的旋转底座,包括固定座、支撑座、卡槽、卡扣、水箱、出水管、进水管、卡孔、支撑架、滚珠、转轴、轴承、滑槽、出气孔、固定底板、螺栓、水泵、冷却管、通气槽、电机、抽风机和导管。本发明的有益效果是:通过水箱的内部设置水泵,并将水泵通过进水管连接冷却管,从而可以利用水泵抽取水箱内的冷却液至冷却管内,利用紧贴在卡槽外壁的冷却管给卡槽降温,能够有效防止长时间工作产生较高的热能损坏电器元件。通过在固定座的内部设置抽风机,从而可以利用抽风机抽取外界空气,并通过出气孔和通气槽进入卡槽内部,通过向上运
一种便于安装的工业机器人用底座.pdf
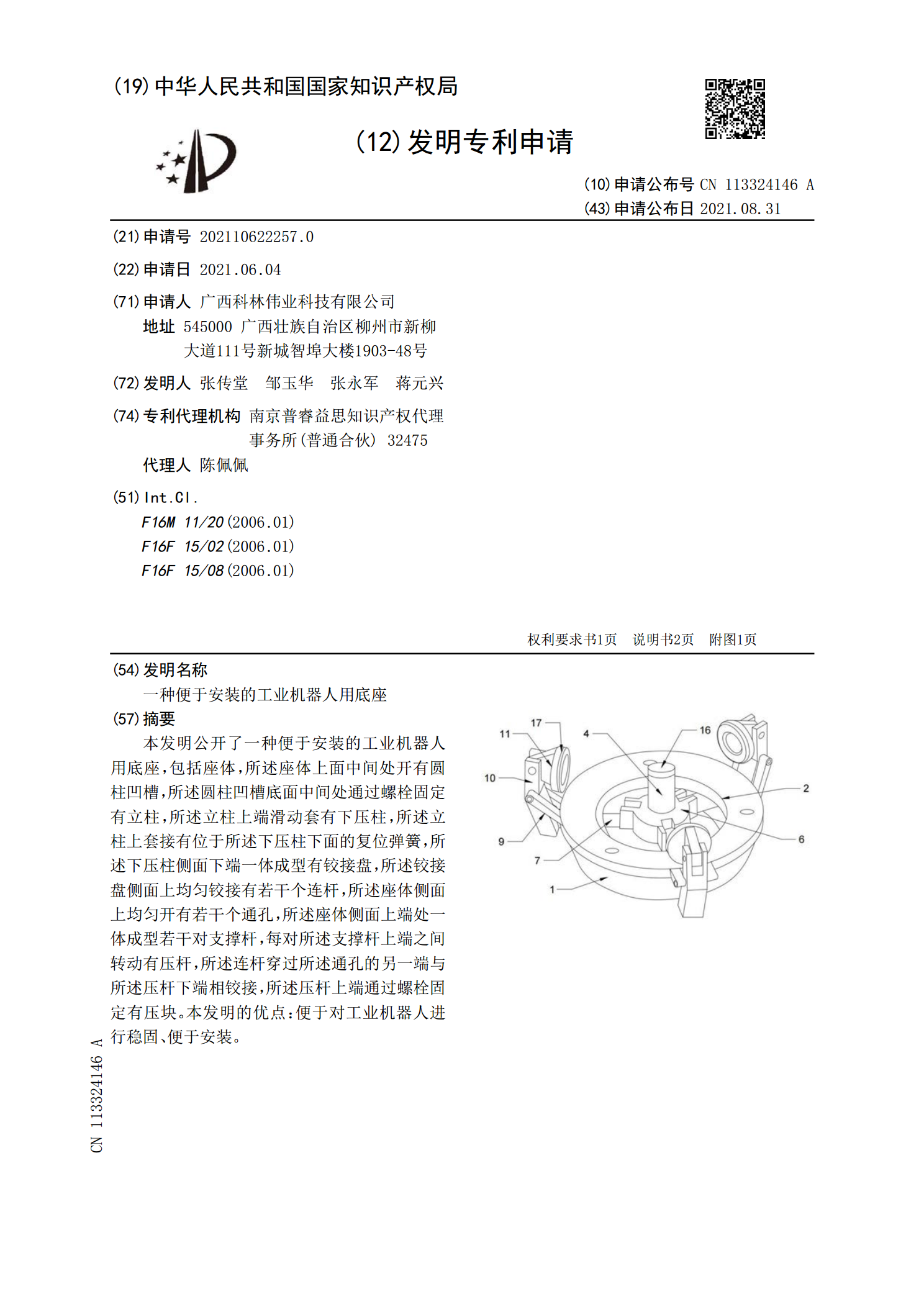
本发明公开了一种便于安装的工业机器人用底座,包括座体,所述座体上面中间处开有圆柱凹槽,所述圆柱凹槽底面中间处通过螺栓固定有立柱,所述立柱上端滑动套有下压柱,所述立柱上套接有位于所述下压柱下面的复位弹簧,所述下压柱侧面下端一体成型有铰接盘,所述铰接盘侧面上均匀铰接有若干个连杆,所述座体侧面上均匀开有若干个通孔,所述座体侧面上端处一体成型若干对支撑杆,每对所述支撑杆上端之间转动有压杆,所述连杆穿过所述通孔的另一端与所述压杆下端相铰接,所述压杆上端通过螺栓固定有压块。本发明的优点:便于对工业机器人进行稳固、便于