
一种能适应多种路况的农田机器人.pdf

小新****ou


1/9
2/9
3/9

4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种能适应多种路况的农田机器人.pdf
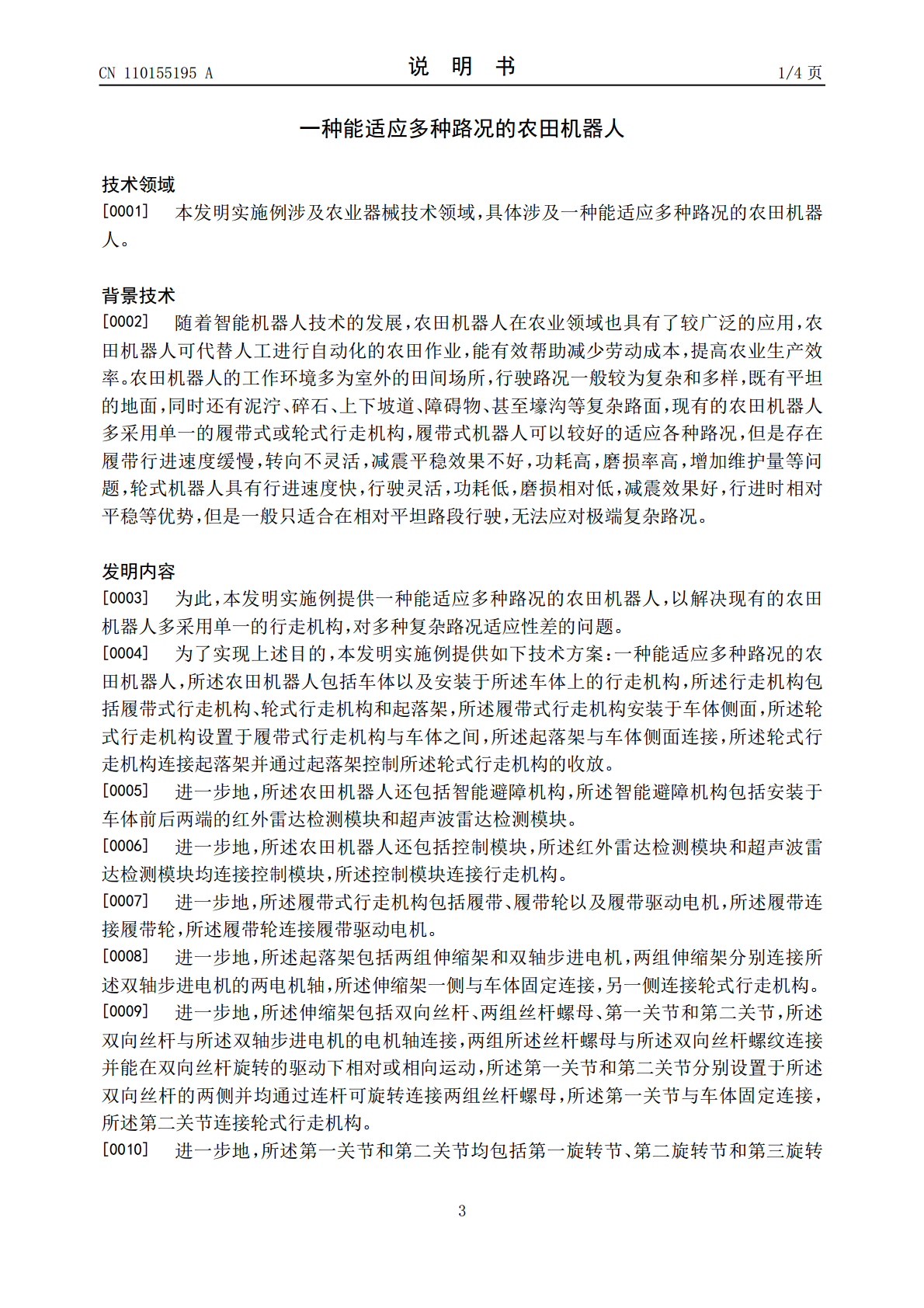
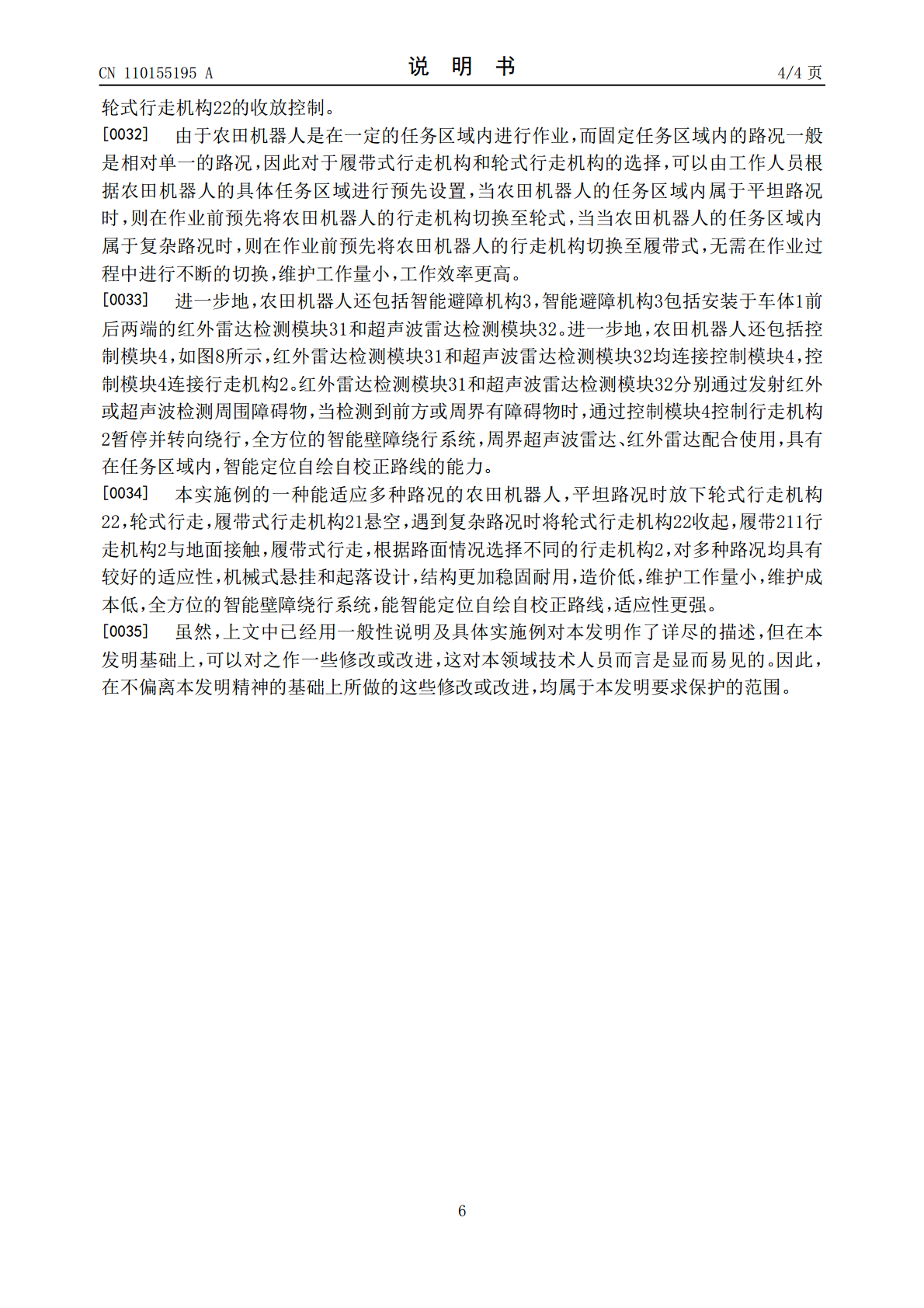
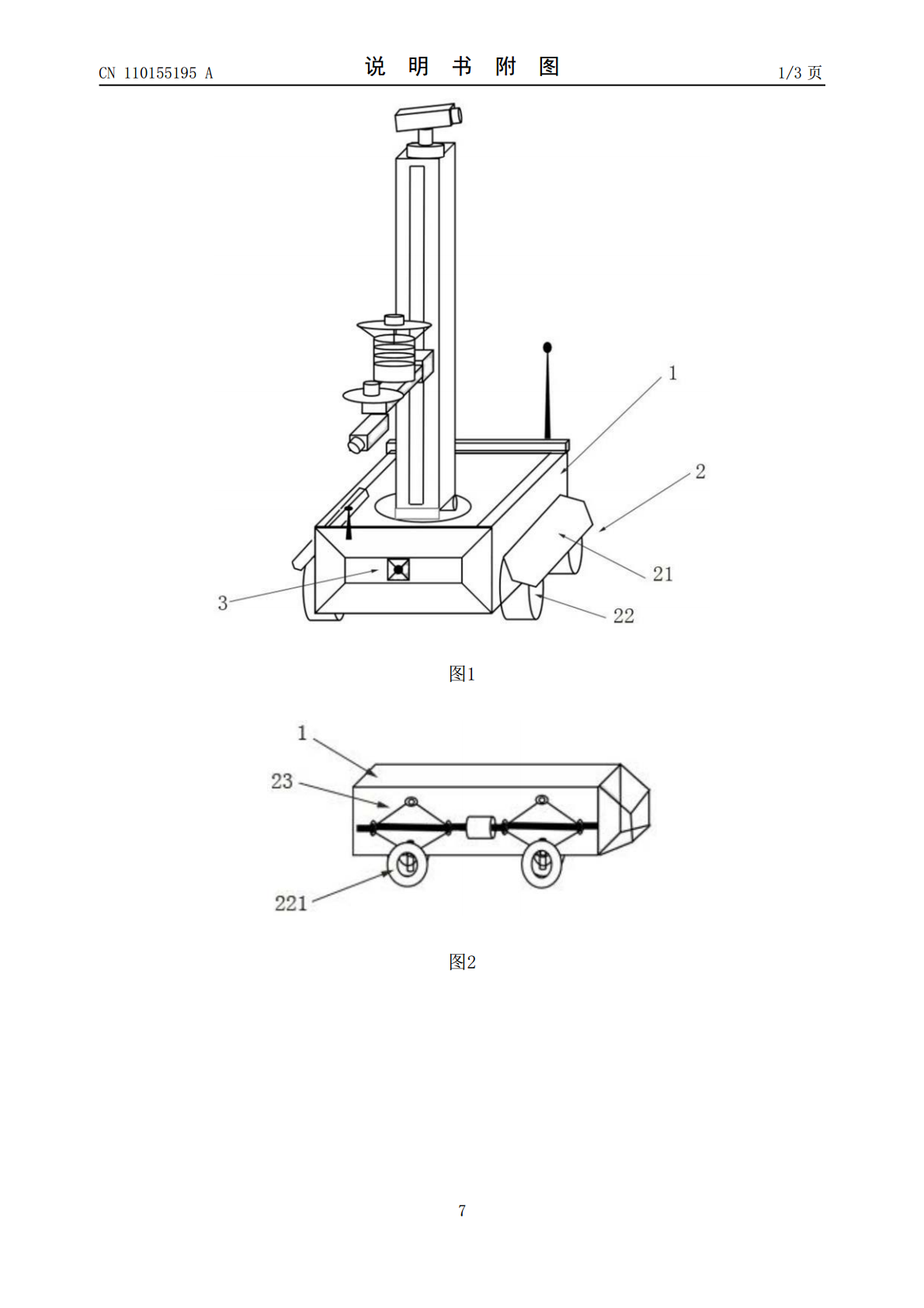
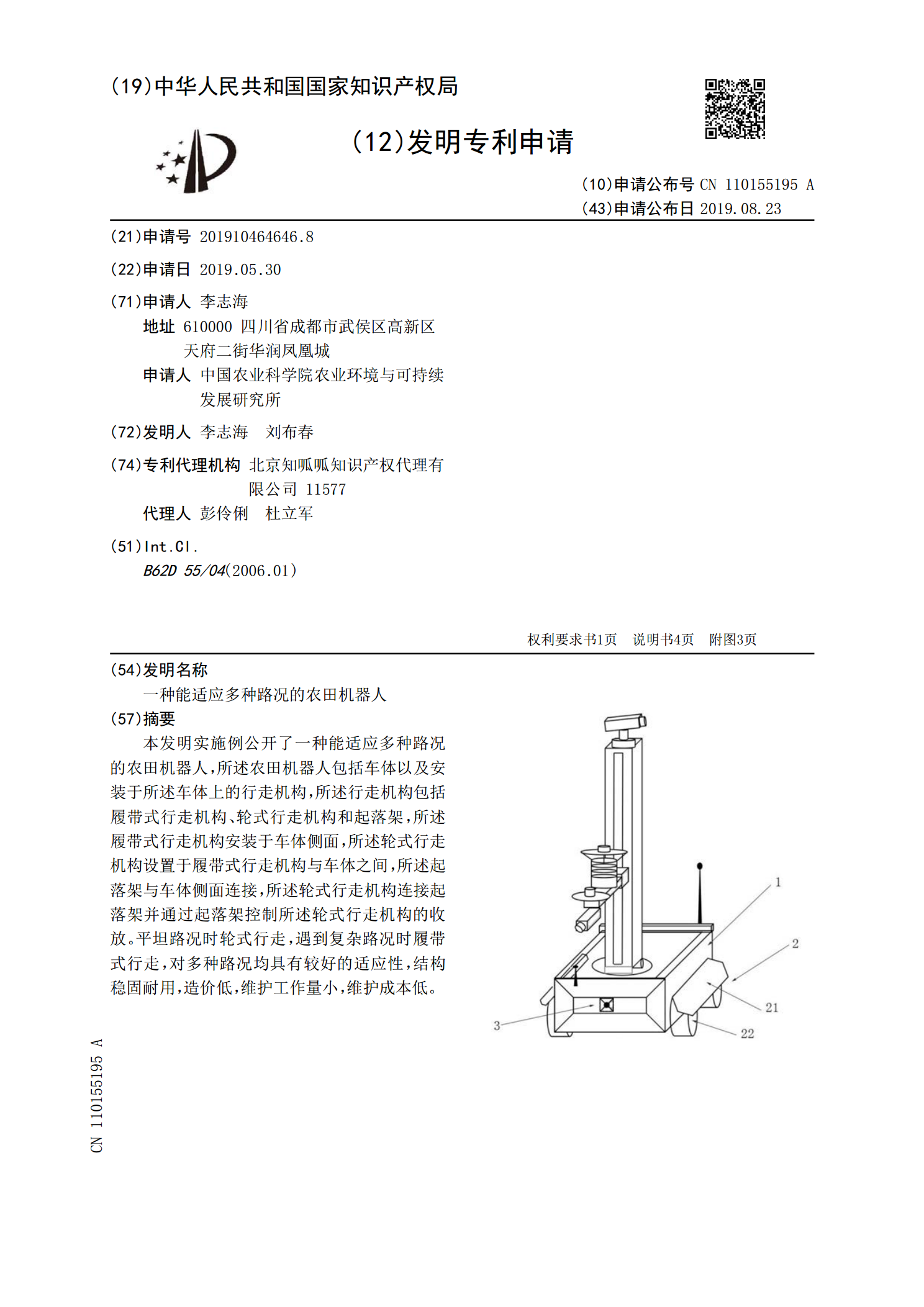
本发明实施例公开了一种能适应多种路况的农田机器人,所述农田机器人包括车体以及安装于所述车体上的行走机构,所述行走机构包括履带式行走机构、轮式行走机构和起落架,所述履带式行走机构安装于车体侧面,所述轮式行走机构设置于履带式行走机构与车体之间,所述起落架与车体侧面连接,所述轮式行走机构连接起落架并通过起落架控制所述轮式行走机构的收放。平坦路况时轮式行走,遇到复杂路况时履带式行走,对多种路况均具有较好的适应性,结构稳固耐用,造价低,维护工作量小,维护成本低。

一种适应多种路况的汽车ABS控制方法.pdf
本发明请求保护一种适应多种路面情况的汽车防抱死制动系统(ABS)控制方法,涉及汽车电子控制技术领域。该方法将ABS的控制过程分为首次控制循环和常规控制循环,在首次控制循环时,利用轮速差来辨识路面,在常规控制循环,利用轮速峰值斜率、减压段中的轮速降值和增压次数来辨识路面。针对对开路面,两个前轮采用修正的低选控制,两个后轮根据辨识出的所处路面采用相应路面的控制策略进行独立控制,针对单一的高附着和低附着路面,前轮采用增压同步控制,后轮采用单一路面的控制方法。根据车辆附着路面采用相应路面的控制策略。该方法可解决汽

一种可适应不同路况的机器人.pdf
本发明涉及机器人技术领域,具体涉及一种可适应不同路况的机器人,包括安装架体、机器人主体、防滑装置、滚轮行走装置和履带行走装置,履带行走装置包括前进轮、行走带、滑动吊架、支撑转杆、辅助垫板、转动马达和前进组件,滑动吊架与安装架体滑动连接,支撑转杆与滑动吊架转动连接,辅助垫板与支撑转杆固定连接,控制滑动吊架横向滑动,使辅助垫片进行横向移动,进一步通过转动马达的工作,带动支撑转杆在滑动吊架内转动,从而使辅助垫板进行角度调节,进而使辅助垫板搭载存在高差的路面之间,通过前进组件控制前进轮转动,从而使行走带在辅助垫板

一种适应多种姿势的深井救援机器人.pdf
本发明公开了一种适应多种姿势的深井救援机器人,它解决了现有技术中救援设备适用范围受限的问题,具有能适用于不同姿势的落井者,能有效保护落井者的有益效果,其方案如下:一种适应多种姿势的深井救援机器人,包括可旋转支架,包括第一旋转盘和第二旋转盘,第一旋转盘设置第一旋转部件与第二旋转盘连接,以带动第二旋转盘相对于第一旋转盘实现转动;抓取机构,安装于第二旋转盘的下方,抓取机构包括多自由度机械臂,机械臂的端部与用于抓持被困者的机械手爪连接;避障机构,包括至少两组,避障机构包括伸缩杆,伸缩杆的一端安装于第一旋转盘,伸缩

一种能适应多种管径的点支数工装.pdf
本发明涉及一种能适应多种管径的点支数工装,包括支架,支架上端包括左框架、中框架和右框架,左框架和右框架水平设置,中框架倾斜设置,左框架高于右框架;所述左框架上设置第一面板、右框架上设置第三面板,中框架上设置第二面板所述中框架上设置面板顶升装置、可调挡边装置,所述右框架的内端设置分距盘组件和计数感应器;本发明能够自动清点铝合金管材的数量,减少误差,提高效率。