
一种适应多种姿势的深井救援机器人.pdf

雨巷****珺琦


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种适应多种姿势的深井救援机器人.pdf
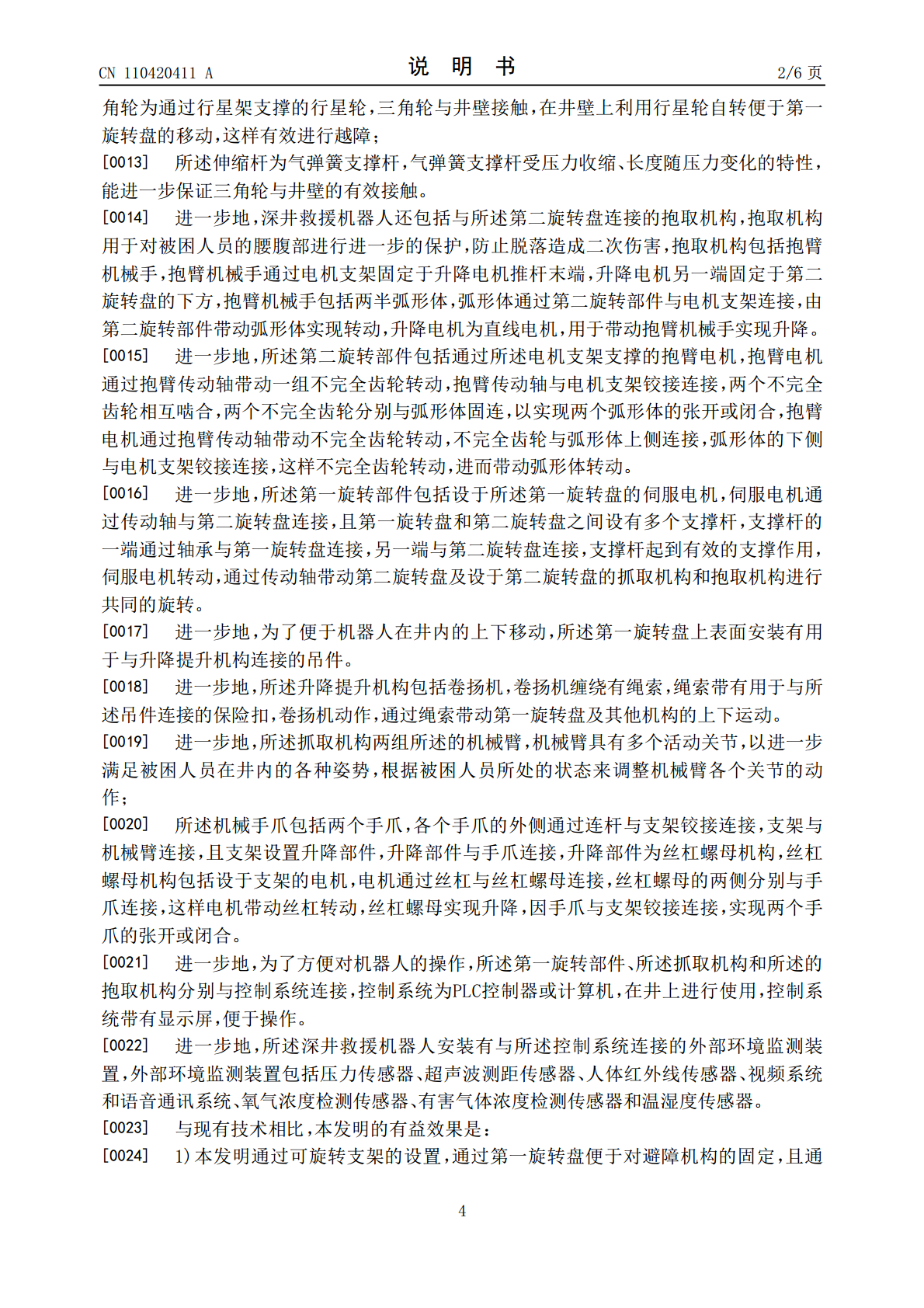
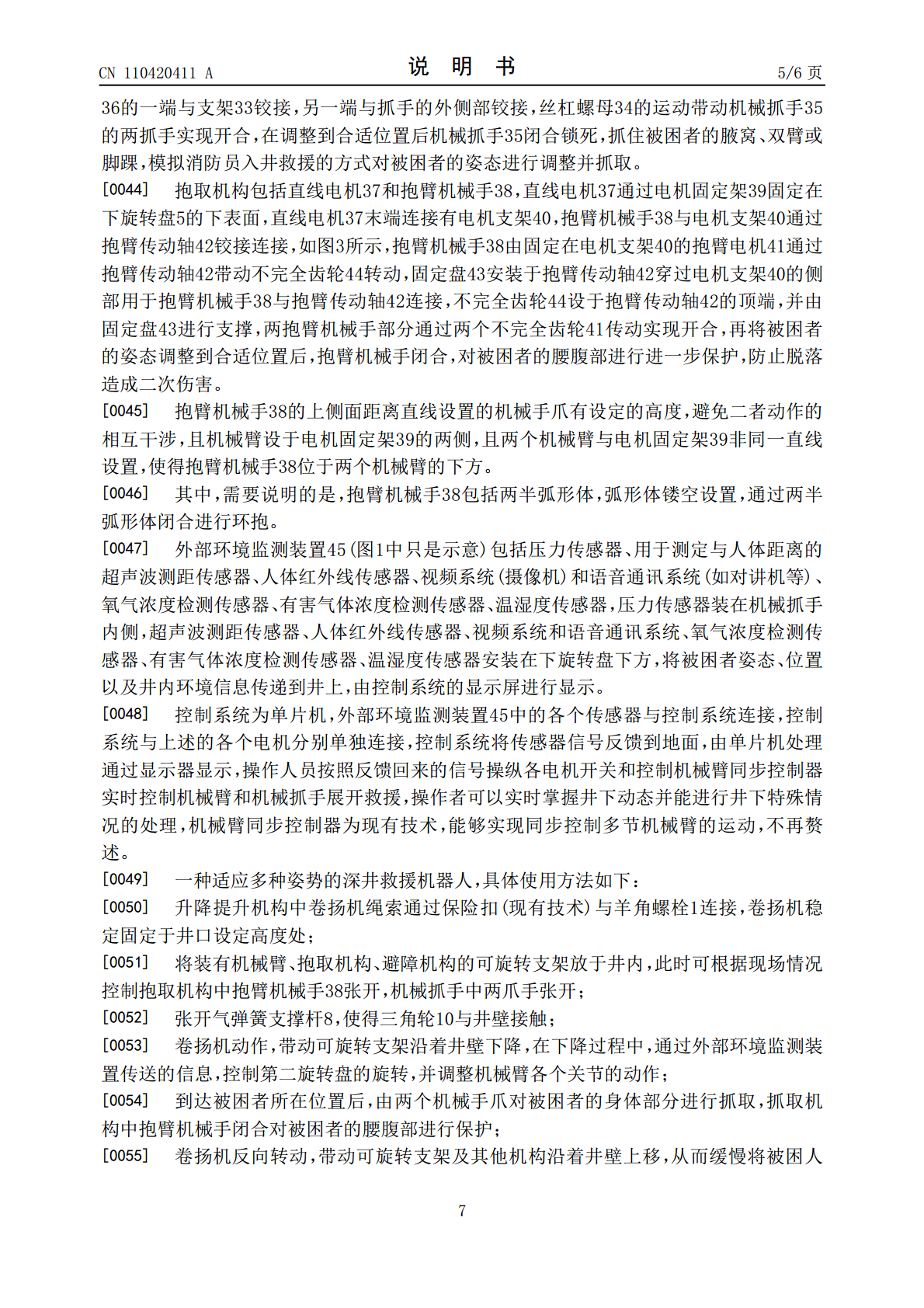
本发明公开了一种适应多种姿势的深井救援机器人,它解决了现有技术中救援设备适用范围受限的问题,具有能适用于不同姿势的落井者,能有效保护落井者的有益效果,其方案如下:一种适应多种姿势的深井救援机器人,包括可旋转支架,包括第一旋转盘和第二旋转盘,第一旋转盘设置第一旋转部件与第二旋转盘连接,以带动第二旋转盘相对于第一旋转盘实现转动;抓取机构,安装于第二旋转盘的下方,抓取机构包括多自由度机械臂,机械臂的端部与用于抓持被困者的机械手爪连接;避障机构,包括至少两组,避障机构包括伸缩杆,伸缩杆的一端安装于第一旋转盘,伸缩
一种深井自动探测救援机器人及救援方法.pdf
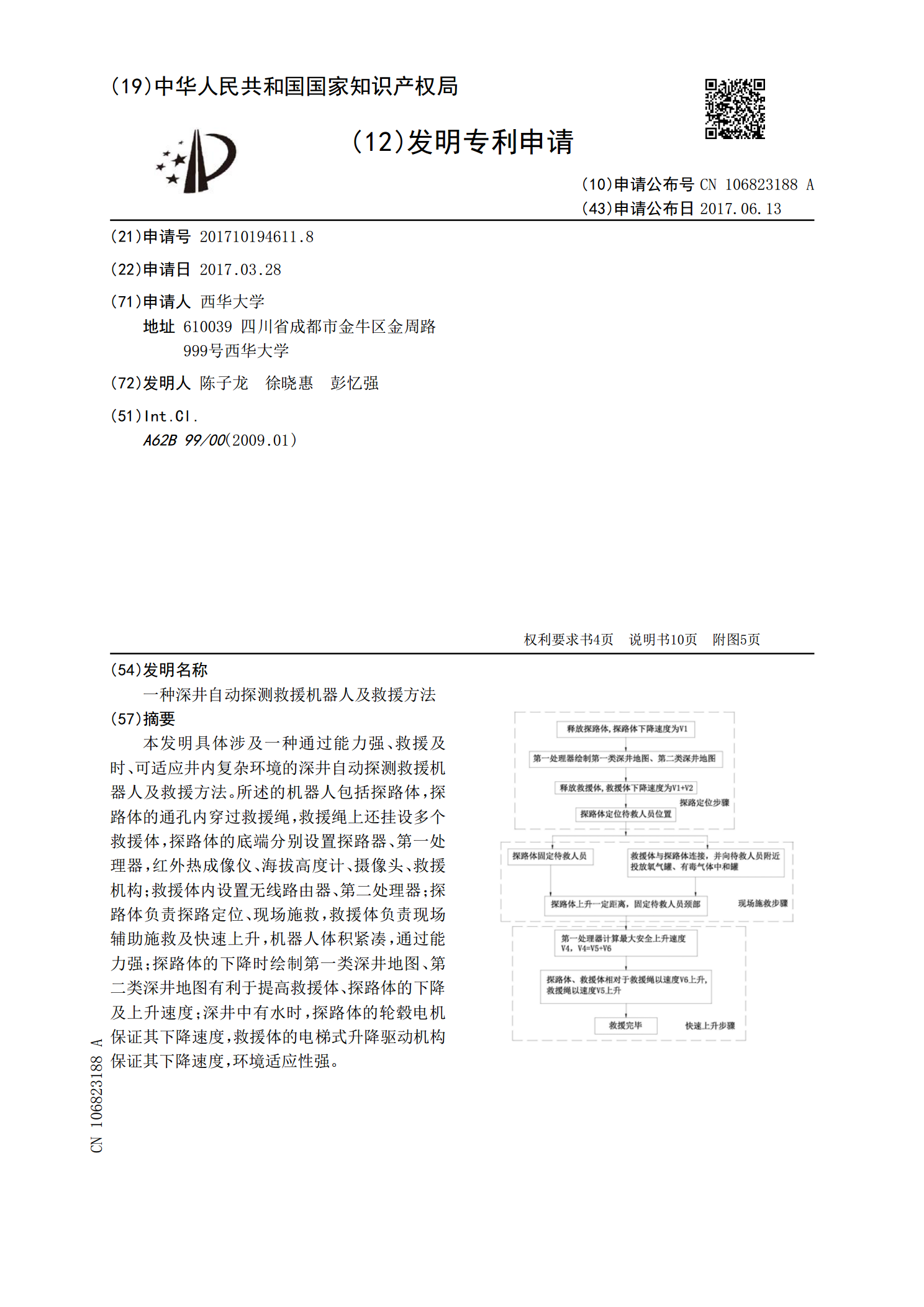
本发明具体涉及一种通过能力强、救援及时、可适应井内复杂环境的深井自动探测救援机器人及救援方法。所述的机器人包括探路体,探路体的通孔内穿过救援绳,救援绳上还挂设多个救援体,探路体的底端分别设置探路器、第一处理器,红外热成像仪、海拔高度计、摄像头、救援机构;救援体内设置无线路由器、第二处理器;探路体负责探路定位、现场施救,救援体负责现场辅助施救及快速上升,机器人体积紧凑,通过能力强;探路体的下降时绘制第一类深井地图、第二类深井地图有利于提高救援体、探路体的下降及上升速度;深井中有水时,探路体的轮毂电机保证其下
一种适用于狭小空间的深井救援机器人及救援方法.pdf
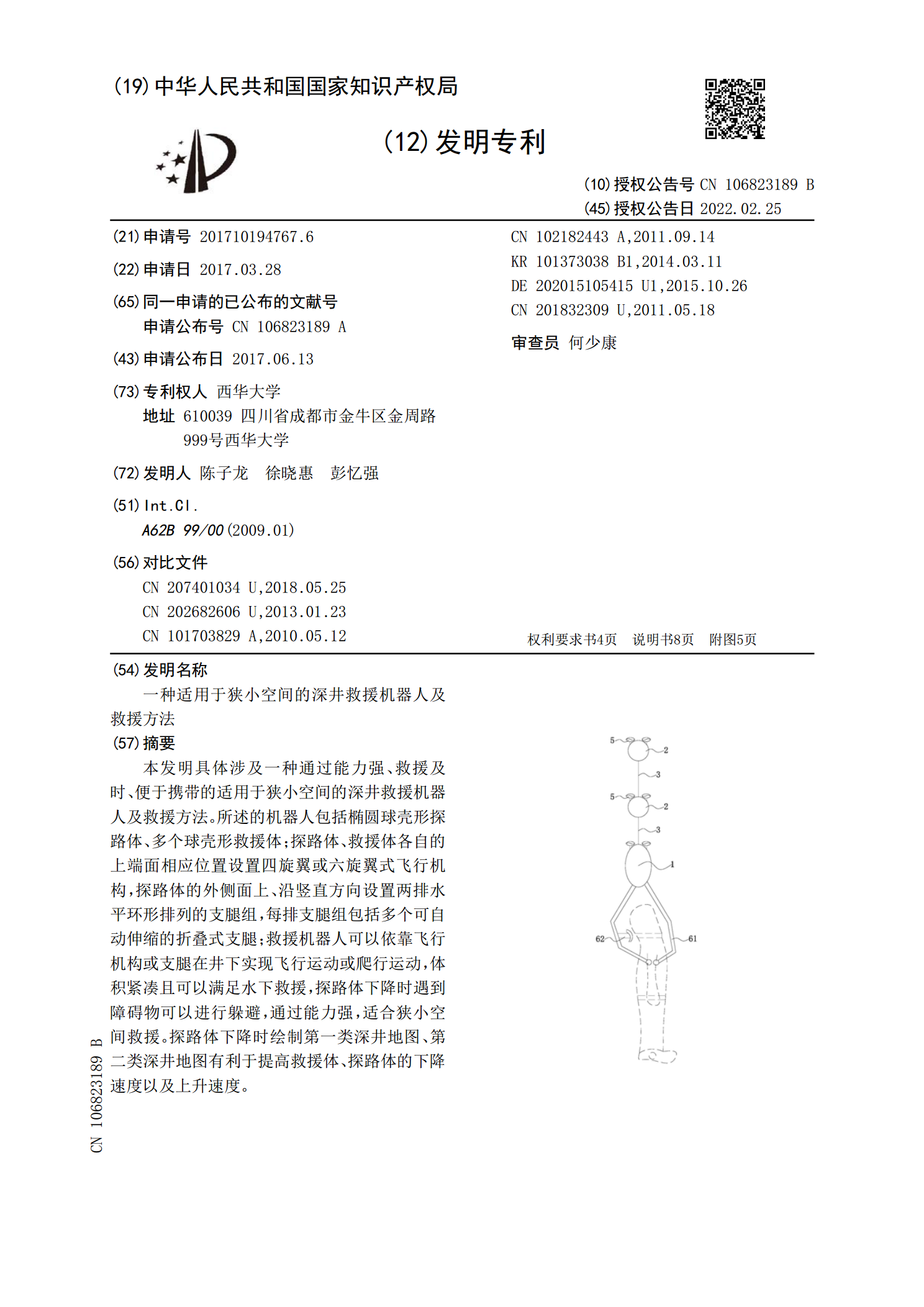
本发明具体涉及一种通过能力强、救援及时、便于携带的适用于狭小空间的深井救援机器人及救援方法。所述的机器人包括椭圆球壳形探路体、多个球壳形救援体;探路体、救援体各自的上端面相应位置设置四旋翼或六旋翼式飞行机构,探路体的外侧面上、沿竖直方向设置两排水平环形排列的支腿组,每排支腿组包括多个可自动伸缩的折叠式支腿;救援机器人可以依靠飞行机构或支腿在井下实现飞行运动或爬行运动,体积紧凑且可以满足水下救援,探路体下降时遇到障碍物可以进行躲避,通过能力强,适合狭小空间救援。探路体下降时绘制第一类深井地图、第二类深井地图

一种基于小口径深井的救援机器人.pdf
本发明提供一种基于小口径深井的救援机器人,涉及机器人技术领域,包括连接块、抓取机构和辅助机构,所述横杆和连接块的拐角处设有加强杆,所述加强杆上固定连接有固定套,所述支杆固定连接在固定套的底部,所述转动块转动连接在支杆的底部,所述转盘固定连接在支杆上,所述气缸固定连接在转盘的底部,所述连接球安装在气缸的输出端,所述弧形夹板的外侧设有滑轨,且所述连接球在滑轨内活动连接,本装置通过驱动件调节弧形夹板的角度,从而顺利高效地完成对被困者上肢腋下的抓取,降低对被困者二次伤害,使其能够顺利地被营救,而且对于存在意识的被
一种能适应多种路况的农田机器人.pdf
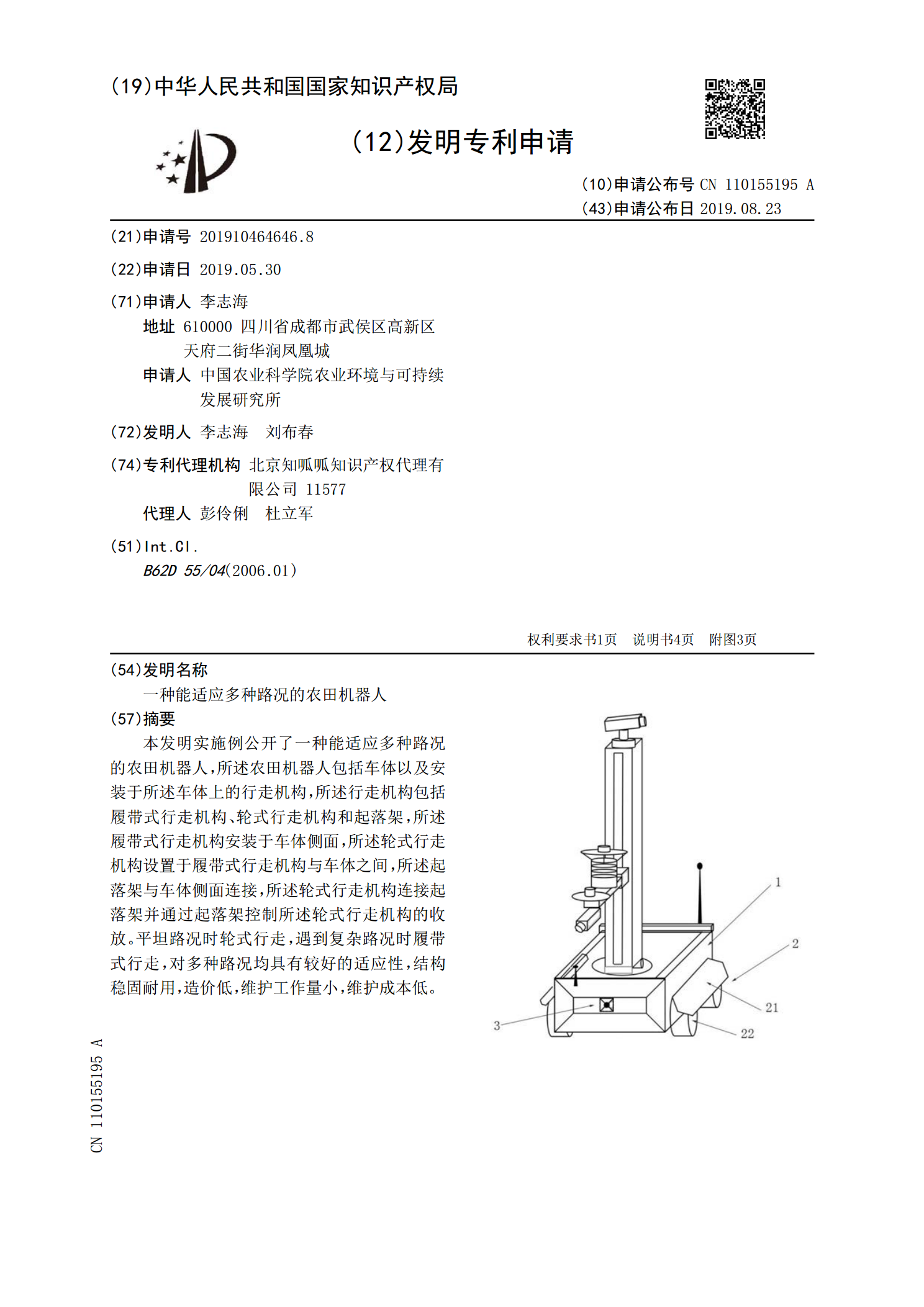
本发明实施例公开了一种能适应多种路况的农田机器人,所述农田机器人包括车体以及安装于所述车体上的行走机构,所述行走机构包括履带式行走机构、轮式行走机构和起落架,所述履带式行走机构安装于车体侧面,所述轮式行走机构设置于履带式行走机构与车体之间,所述起落架与车体侧面连接,所述轮式行走机构连接起落架并通过起落架控制所述轮式行走机构的收放。平坦路况时轮式行走,遇到复杂路况时履带式行走,对多种路况均具有较好的适应性,结构稳固耐用,造价低,维护工作量小,维护成本低。