
一种可适应不同路况的机器人.pdf

一条****杉淑


1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可适应不同路况的机器人.pdf
本发明涉及机器人技术领域,具体涉及一种可适应不同路况的机器人,包括安装架体、机器人主体、防滑装置、滚轮行走装置和履带行走装置,履带行走装置包括前进轮、行走带、滑动吊架、支撑转杆、辅助垫板、转动马达和前进组件,滑动吊架与安装架体滑动连接,支撑转杆与滑动吊架转动连接,辅助垫板与支撑转杆固定连接,控制滑动吊架横向滑动,使辅助垫片进行横向移动,进一步通过转动马达的工作,带动支撑转杆在滑动吊架内转动,从而使辅助垫板进行角度调节,进而使辅助垫板搭载存在高差的路面之间,通过前进组件控制前进轮转动,从而使行走带在辅助垫板
一种能适应多种路况的农田机器人.pdf
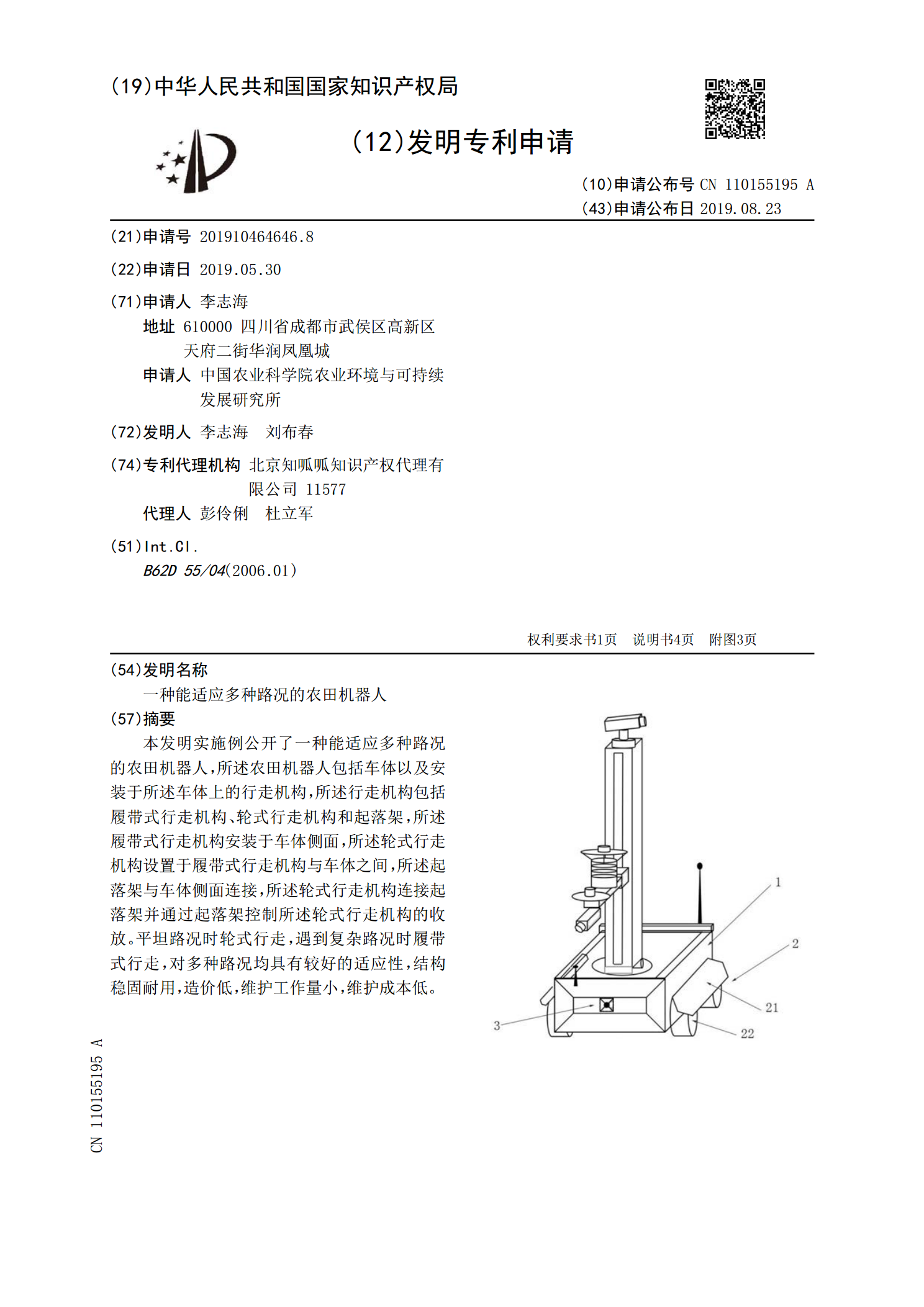
本发明实施例公开了一种能适应多种路况的农田机器人,所述农田机器人包括车体以及安装于所述车体上的行走机构,所述行走机构包括履带式行走机构、轮式行走机构和起落架,所述履带式行走机构安装于车体侧面,所述轮式行走机构设置于履带式行走机构与车体之间,所述起落架与车体侧面连接,所述轮式行走机构连接起落架并通过起落架控制所述轮式行走机构的收放。平坦路况时轮式行走,遇到复杂路况时履带式行走,对多种路况均具有较好的适应性,结构稳固耐用,造价低,维护工作量小,维护成本低。
一种可自适应不同高度的番茄采摘机器人.pdf
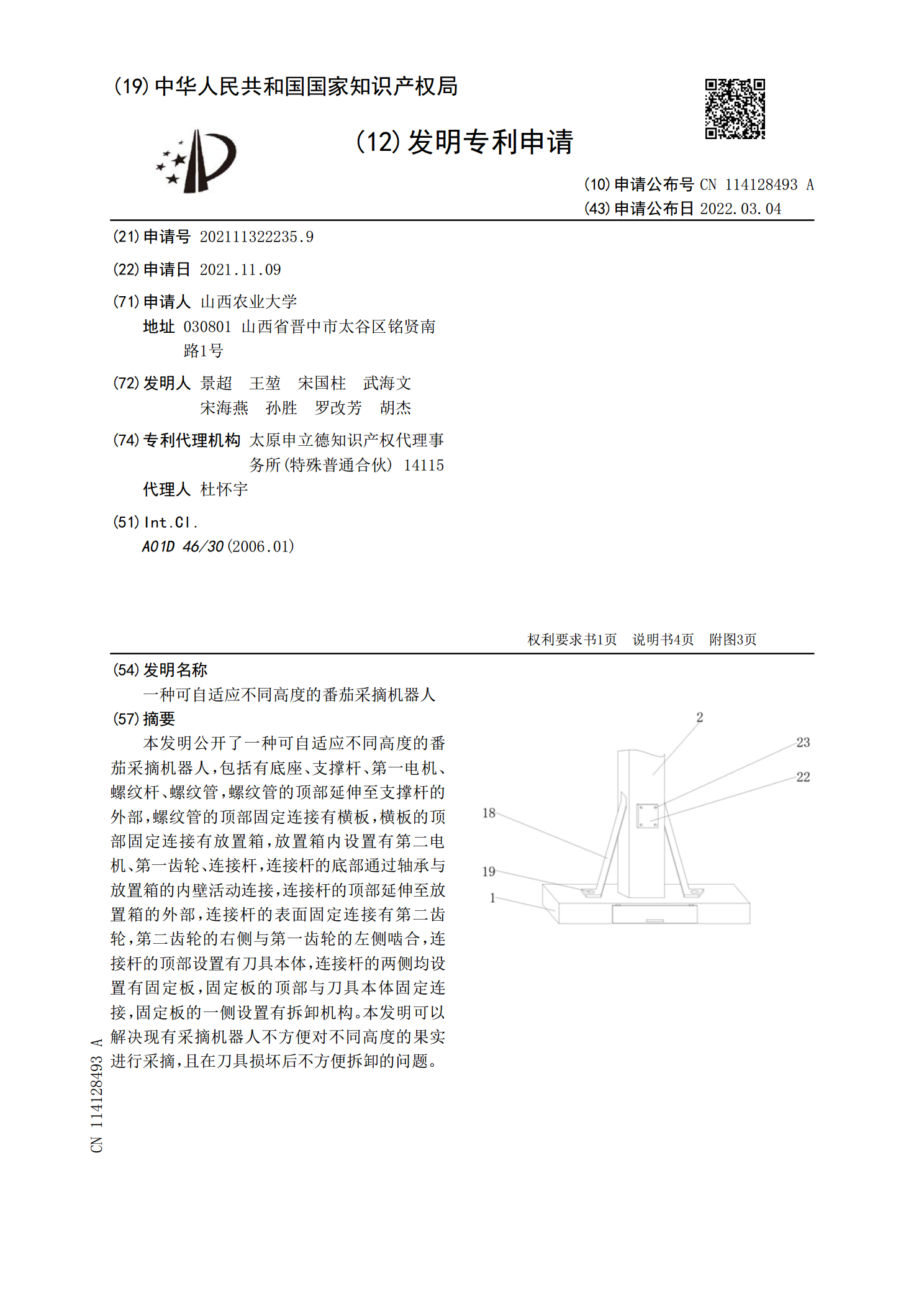
本发明公开了一种可自适应不同高度的番茄采摘机器人,包括有底座、支撑杆、第一电机、螺纹杆、螺纹管,螺纹管的顶部延伸至支撑杆的外部,螺纹管的顶部固定连接有横板,横板的顶部固定连接有放置箱,放置箱内设置有第二电机、第一齿轮、连接杆,连接杆的底部通过轴承与放置箱的内壁活动连接,连接杆的顶部延伸至放置箱的外部,连接杆的表面固定连接有第二齿轮,第二齿轮的右侧与第一齿轮的左侧啮合,连接杆的顶部设置有刀具本体,连接杆的两侧均设置有固定板,固定板的顶部与刀具本体固定连接,固定板的一侧设置有拆卸机构。本发明可以解决现有采摘机

一种可适应不同管径变化的履带轮式管道清洁机器人.pdf
本发明提供了一种可适应不同管径变化的履带轮式管道清洁机器人,属于管道机器人领域。其特征是包括:机架,履带轮式行走机构,管径自适应调整机构,管道清洁机构,摄像头升降机和红外检测装置。4个履带轮分布在机架的4个角,带动整机行走,可伸缩的电动推杆控制履带轮与机架之间的角度可变,使得履带轮紧贴管壁。摄像头升降架一端设置在机架上,另一端安装摄像头单元和辅助光源。红外检测装置,安装在适当的高度,发出不同的控制信号,控制机器人行走、越障和转向。本发明的管道清洁机器人具有可自适应管径变化,越障能力强,负载能力强,弯道通过

一种适应不同路况的医用检测仪防拉行走平台.pdf
本发明属于医用仪器支撑平台技术领域,尤其涉及一种适应不同路况的医用检测仪防拉行走平台,它包括平台、执行机构、驱动球、万向轮机构、半球型壳等,其中执行机构中的L型管套跟随探头弯管的拉动情况而产生相应的运动,进而使得环形感应器和第一距离感应器产生不同信号,来使第一电机和第二电机启动或者停止,最终使得弧形滚轮带动驱动球滚动来使平台向医护人员靠近,防止了探头弯管在被拉直时继续拉伸产生对探头弯管的损坏,进而保护了检测仪;另外驱动机构的设计也能使得行走平台可以在不同的路况下行走,扩展了行走平台的移动范围。本发明结构简