
无人艇收放装置对接牵引系统及方法.pdf

是你****噩呀

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
无人艇收放装置对接牵引系统及方法.pdf
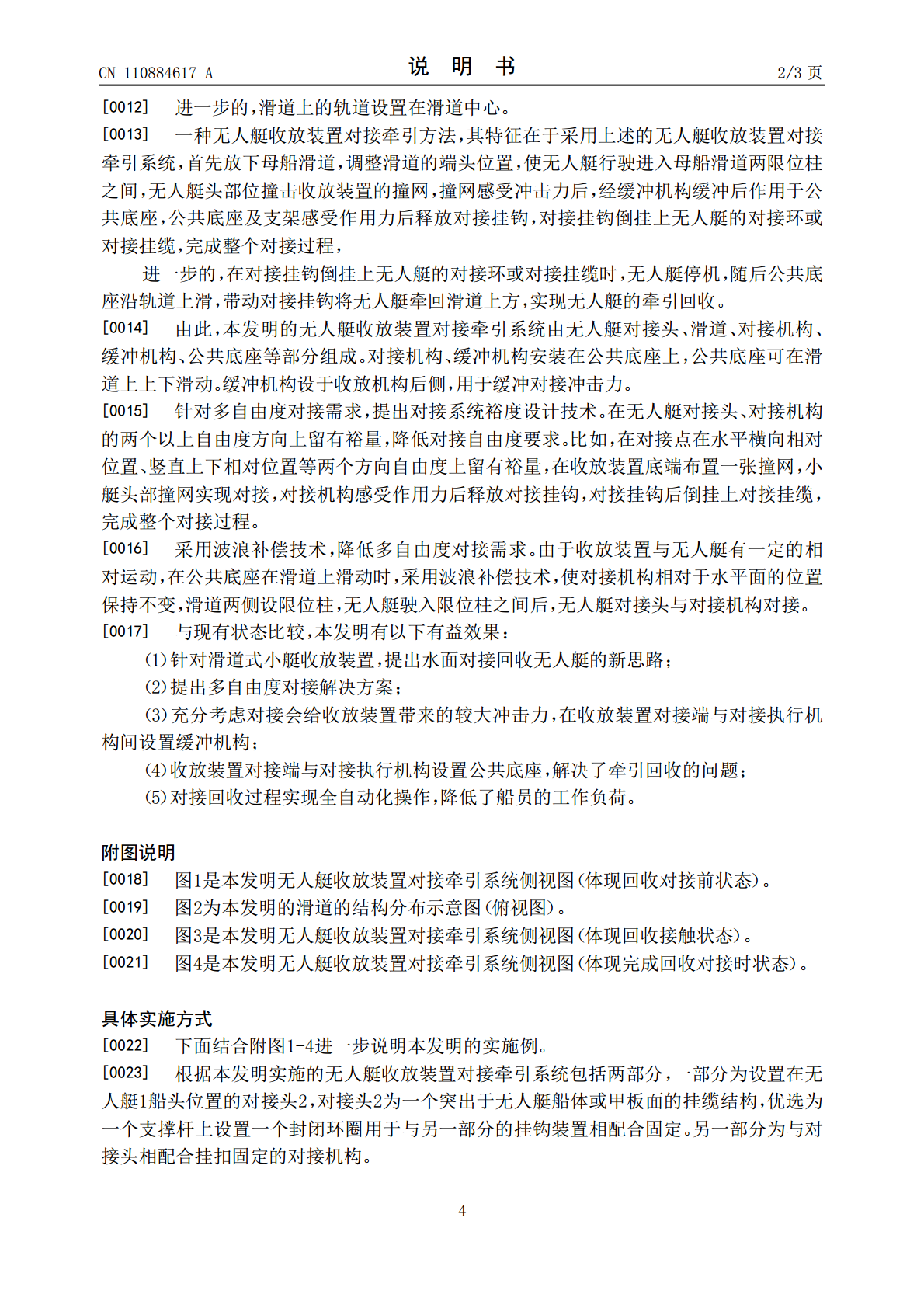
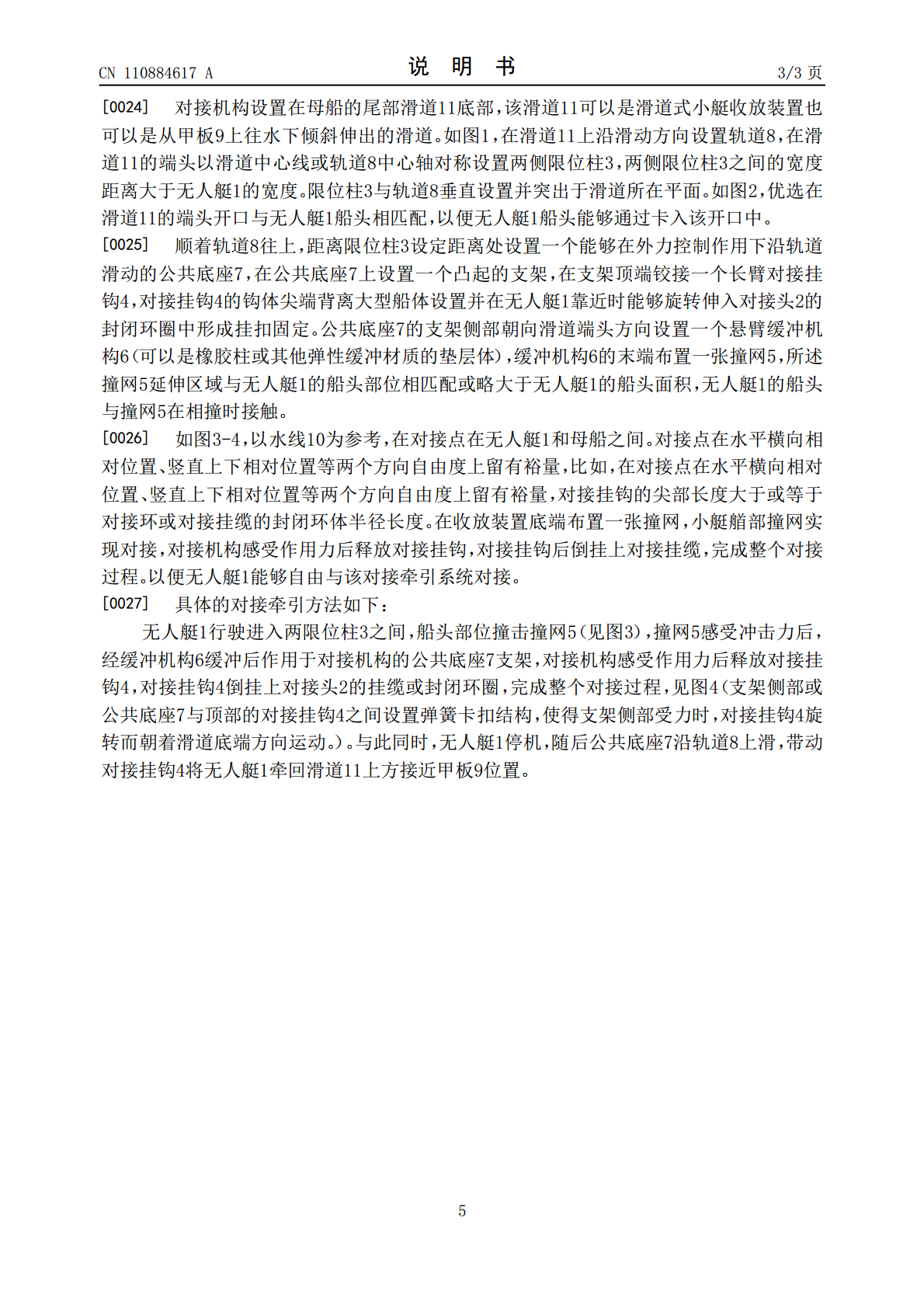
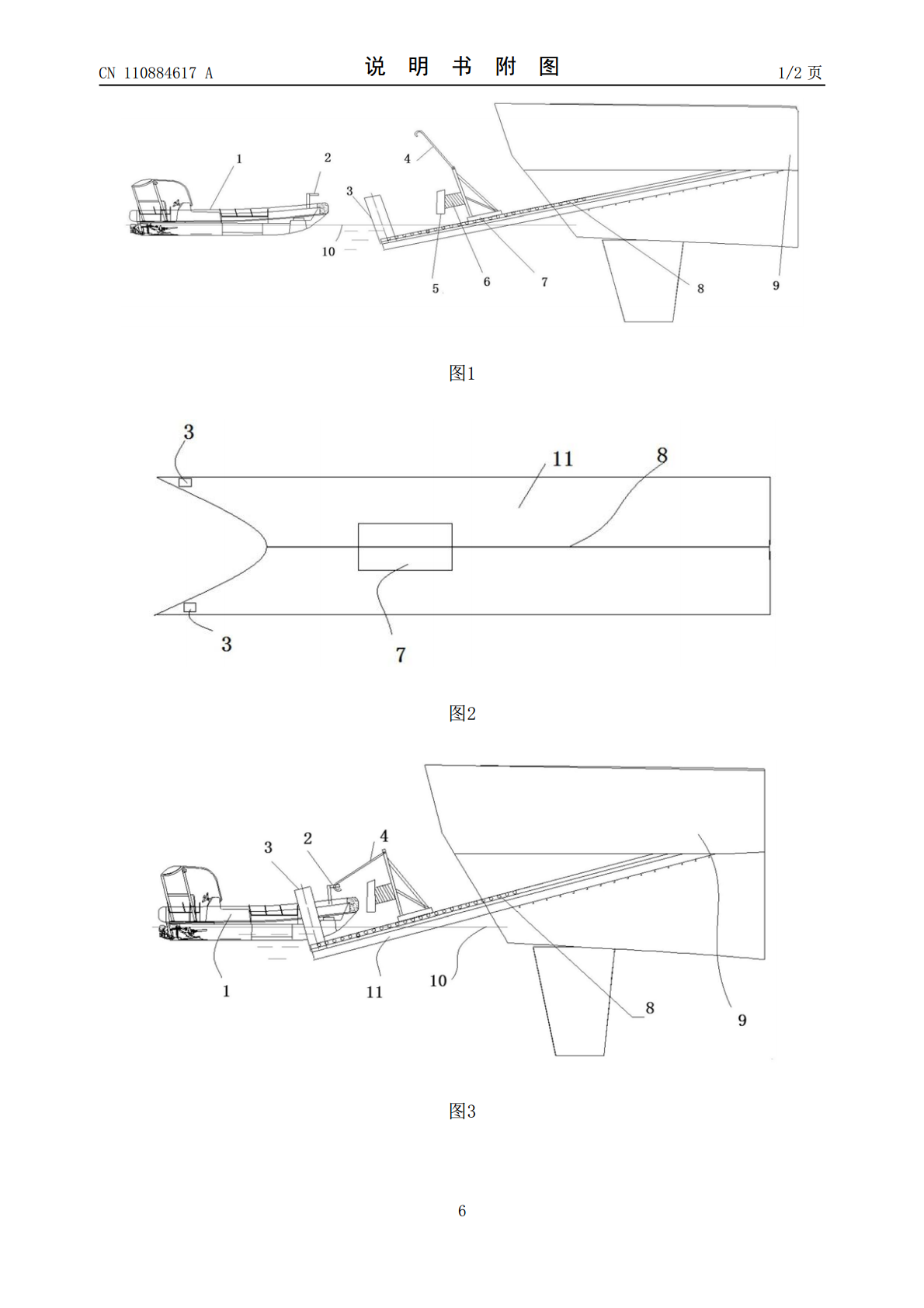
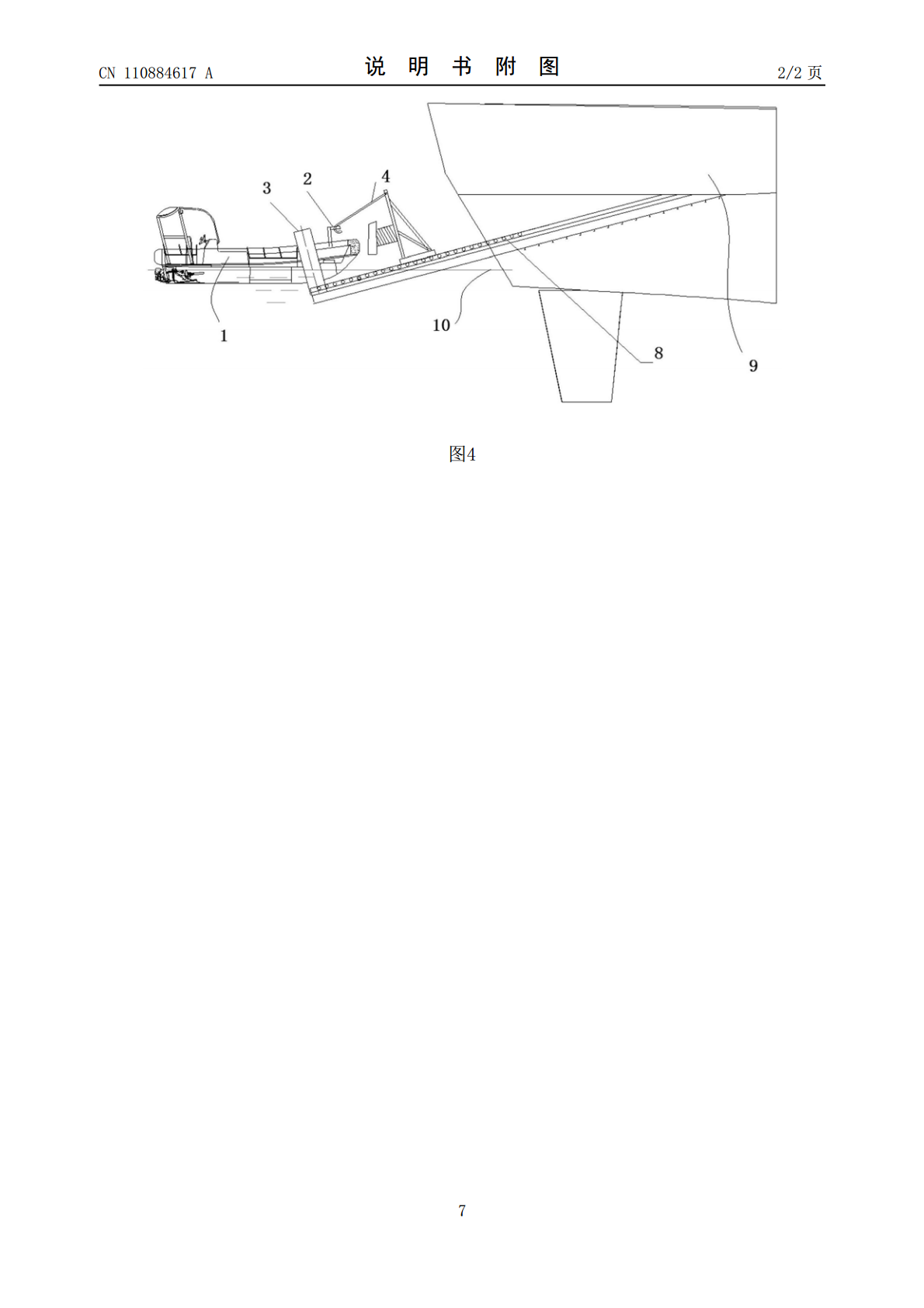
本发明公开了一种无人艇收放装置对接牵引系统及方法,包括设置在无人艇上的对接环或对接挂缆,以及设置在母船滑道底端的收放装置;母船滑道端头两侧设置限位柱,距离限位柱沿滑道往上设定距离处设置一个能够沿轨道滑动的公共底座,在该公共底座上设置一个支架,在支架顶端铰接一个对接挂钩,该对接挂钩在支架受力时向滑道端头旋转而使得挂钩尖部伸入对接环或对接挂缆中与无人艇在滑道底端结合。解决多自由度对接问题,冲击力小,不限制收放装置本身的结构,操作简单,对接效率高,在对接后还能将无人艇从海水中牵引至滑道上,实现无人艇的自动化回收
一种无人水面艇收放无人潜航器装置.pdf
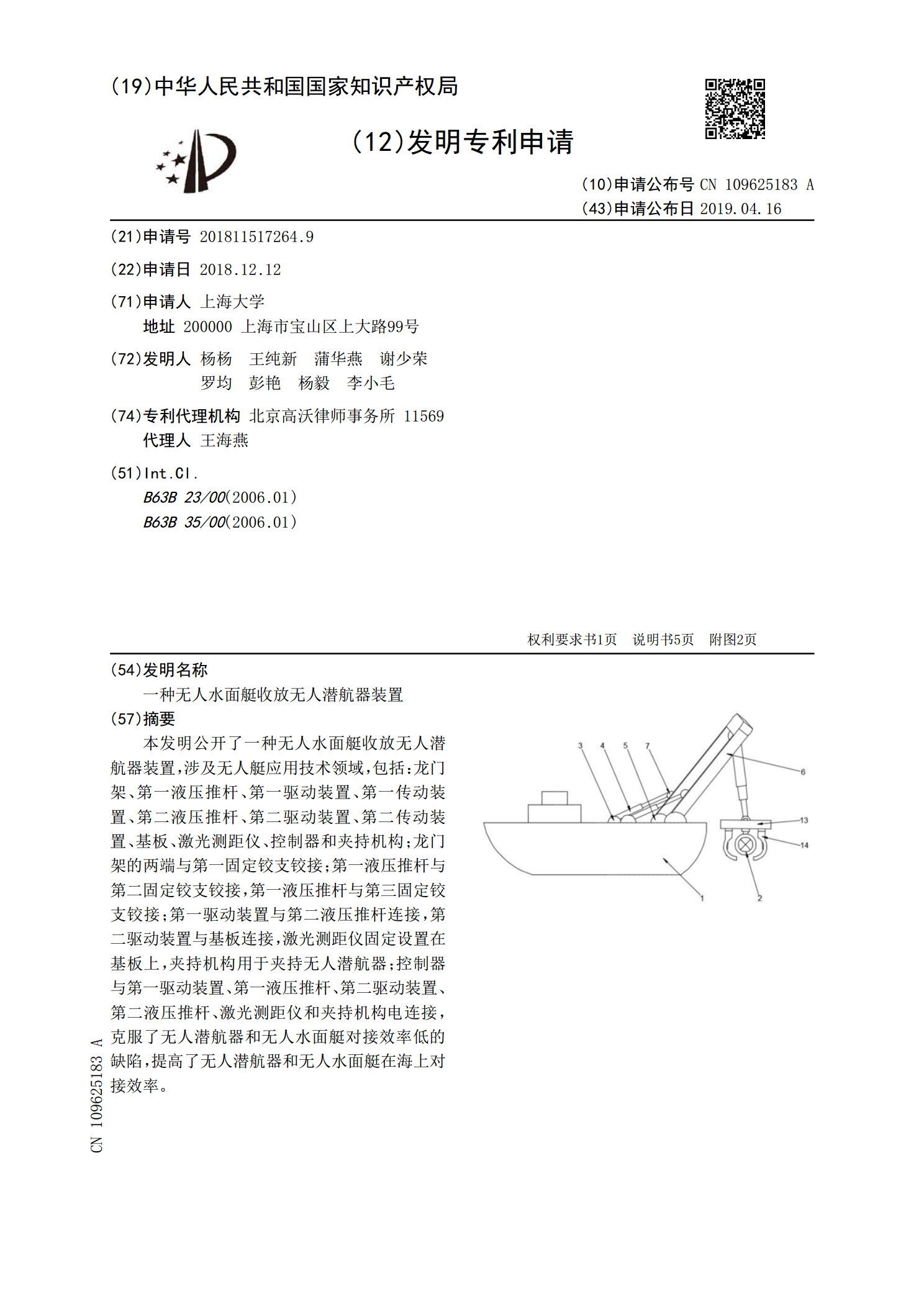
本发明公开了一种无人水面艇收放无人潜航器装置,涉及无人艇应用技术领域,包括:龙门架、第一液压推杆、第一驱动装置、第一传动装置、第二液压推杆、第二驱动装置、第二传动装置、基板、激光测距仪、控制器和夹持机构;龙门架的两端与第一固定铰支铰接;第一液压推杆与第二固定铰支铰接,第一液压推杆与第三固定铰支铰接;第一驱动装置与第二液压推杆连接,第二驱动装置与基板连接,激光测距仪固定设置在基板上,夹持机构用于夹持无人潜航器;控制器与第一驱动装置、第一液压推杆、第二驱动装置、第二液压推杆、激光测距仪和夹持机构电连接,克服了
对接牵引装置和对接牵引系统.pdf
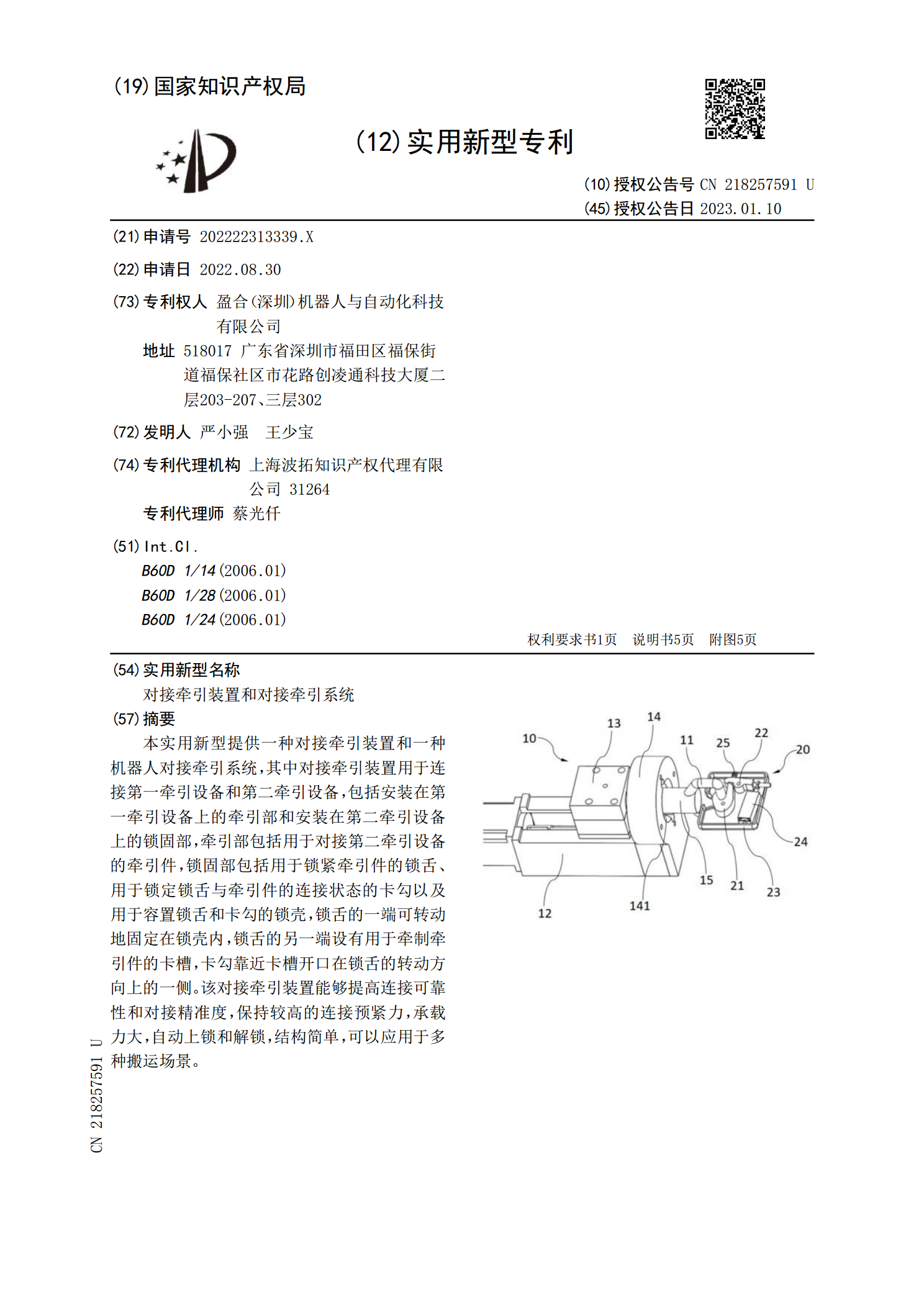
本实用新型提供一种对接牵引装置和一种机器人对接牵引系统,其中对接牵引装置用于连接第一牵引设备和第二牵引设备,包括安装在第一牵引设备上的牵引部和安装在第二牵引设备上的锁固部,牵引部包括用于对接第二牵引设备的牵引件,锁固部包括用于锁紧牵引件的锁舌、用于锁定锁舌与牵引件的连接状态的卡勾以及用于容置锁舌和卡勾的锁壳,锁舌的一端可转动地固定在锁壳内,锁舌的另一端设有用于牵制牵引件的卡槽,卡勾靠近卡槽开口在锁舌的转动方向上的一侧。该对接牵引装置能够提高连接可靠性和对接精准度,保持较高的连接预紧力,承载力大,自动上锁和
模块化的艇收放装置.pdf
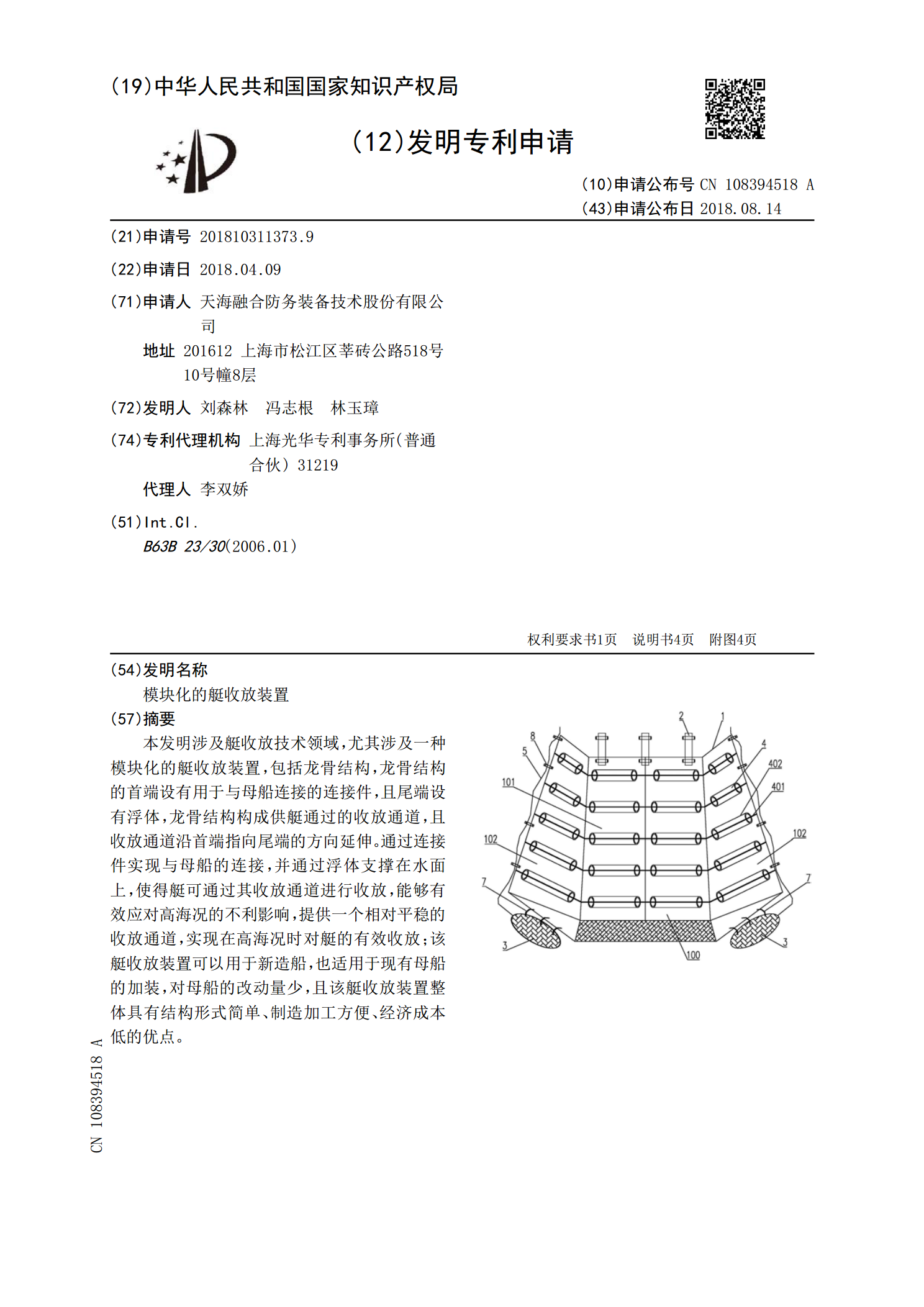
本发明涉及艇收放技术领域,尤其涉及一种模块化的艇收放装置,包括龙骨结构,龙骨结构的首端设有用于与母船连接的连接件,且尾端设有浮体,龙骨结构构成供艇通过的收放通道,且收放通道沿首端指向尾端的方向延伸。通过连接件实现与母船的连接,并通过浮体支撑在水面上,使得艇可通过其收放通道进行收放,能够有效应对高海况的不利影响,提供一个相对平稳的收放通道,实现在高海况时对艇的有效收放;该艇收放装置可以用于新造船,也适用于现有母船的加装,对母船的改动量少,且该艇收放装置整体具有结构形式简单、制造加工方便、经济成本低的优点。

基于无人水面艇的水下拖曳体自主收放装置设计与研究的开题报告.docx
基于无人水面艇的水下拖曳体自主收放装置设计与研究的开题报告一、选题背景及意义随着现代科技不断进步,无人水面艇在海洋工程和科学研究等领域发挥着越来越重要的作用。然而,目前很多水面艇在海洋勘探和研究中仍存在一些问题,其中之一就是无法实现水下拖曳体自主收放。而水下拖曳体是一种常见的海洋探测设备,它能够对海底进行高效、准确的勘探,因此如何实现水下拖曳体自主收放成为了无人水面艇研究领域中亟待解决的技术难题。二、研究目的本文旨在设计和研究一种基于无人水面艇的水下拖曳体自主收放装置,解决无人水面艇在海洋勘探和研究中无法