
一种可重构自主水下航行器硬件架构.pdf

努力****爱静

1/6
2/6

3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可重构自主水下航行器硬件架构.pdf
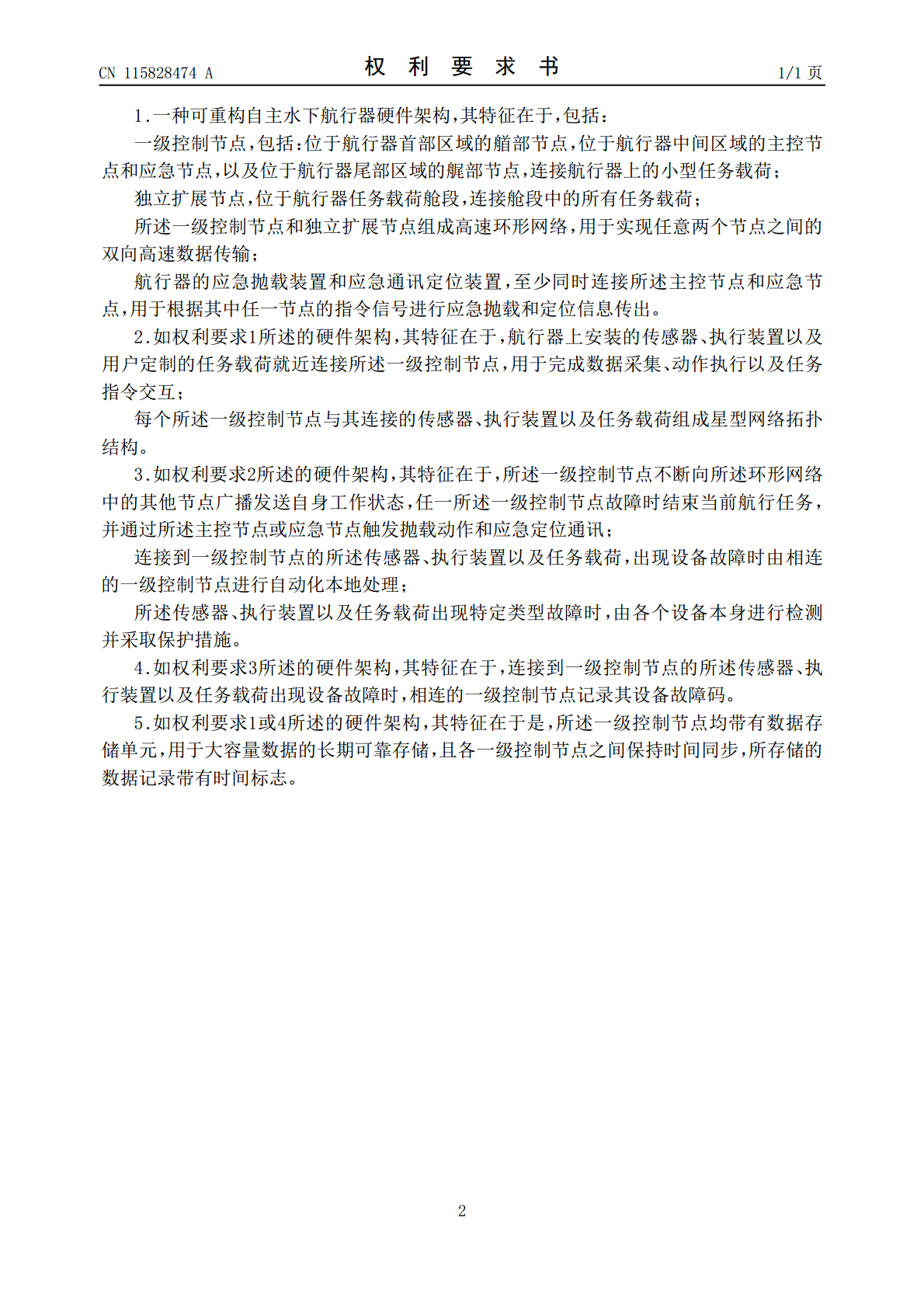
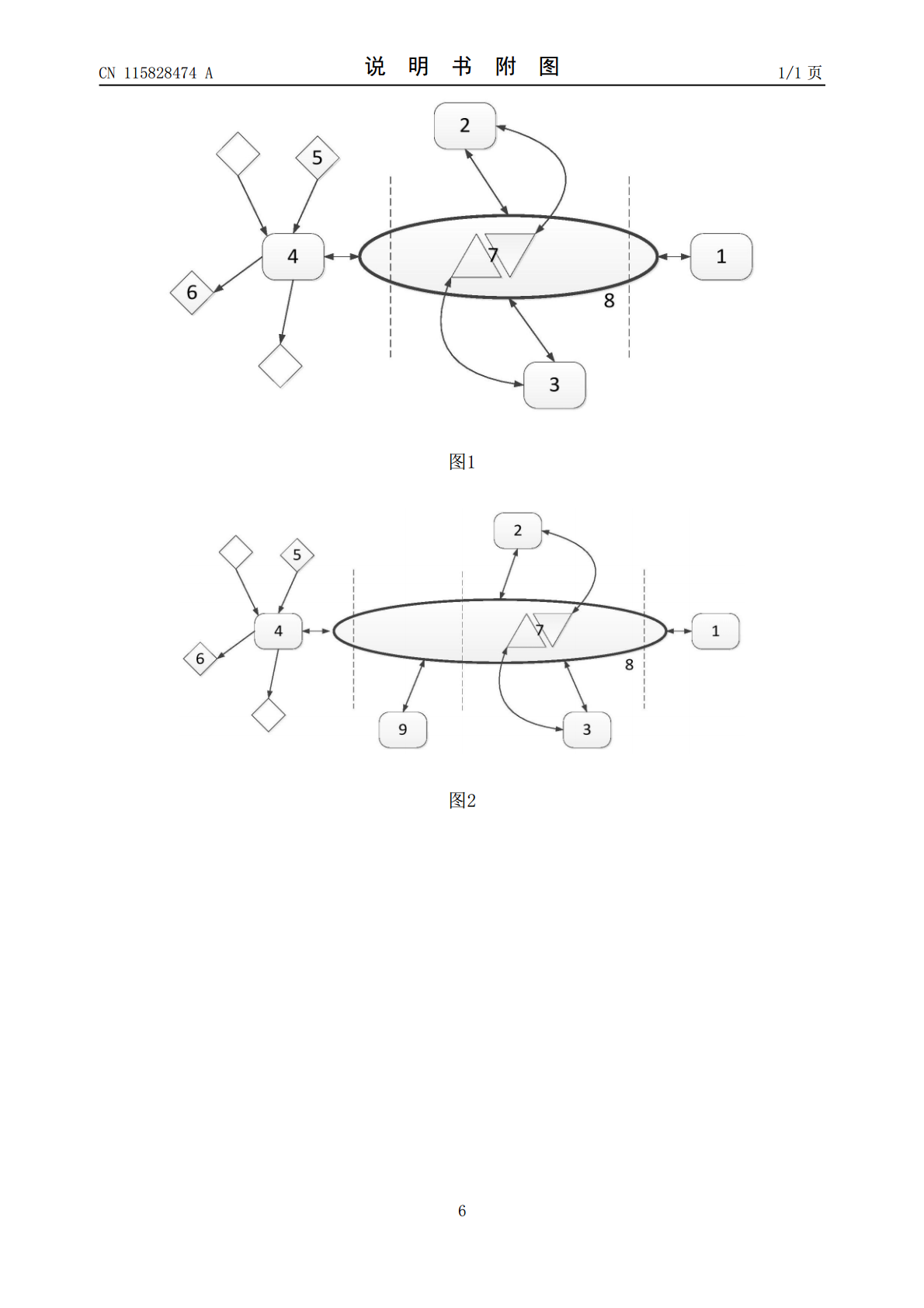
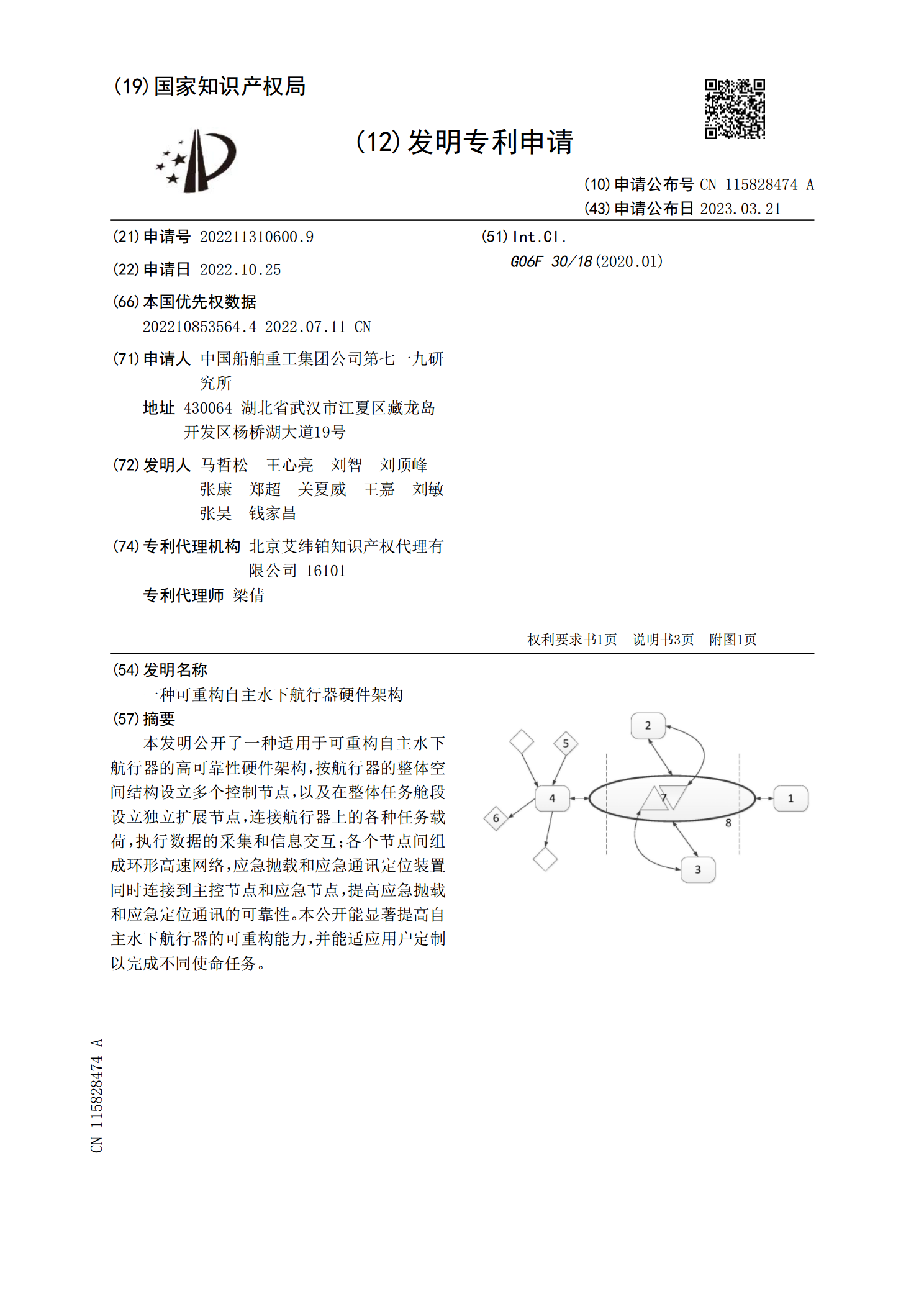
本发明公开了一种适用于可重构自主水下航行器的高可靠性硬件架构,按航行器的整体空间结构设立多个控制节点,以及在整体任务舱段设立独立扩展节点,连接航行器上的各种任务载荷,执行数据的采集和信息交互;各个节点间组成环形高速网络,应急抛载和应急通讯定位装置同时连接到主控节点和应急节点,提高应急抛载和应急定位通讯的可靠性。本公开能显著提高自主水下航行器的可重构能力,并能适应用户定制以完成不同使命任务。

一种便携式自主水下航行器.pdf
本发明提供了一种便携式水下航行器,其特征在于,包括:包括相互独立并依次连接的头部壳体,侧扫段壳体,电气控制段壳体,测试段壳体,多普勒段壳体以及尾部段壳体;所述头部壳体构成水下航行器本体的流线外形结构;所述侧扫段壳体的外周设置至少一个抓手,用于方便手持水下航行器本体;所述电气控制段壳体内设置用于装配供电的电池组以及用于航行的电气控制电路板;所述测试段壳体上设置安装各个天线出线口的安装结构;所述多普勒段壳体内放置多普勒测速仪,其用于测量水下航行器相对水底的绝对速度;所述尾部段壳体内设置动力组件,所述动力组件用
自主水下航行器及其对接装置.pdf
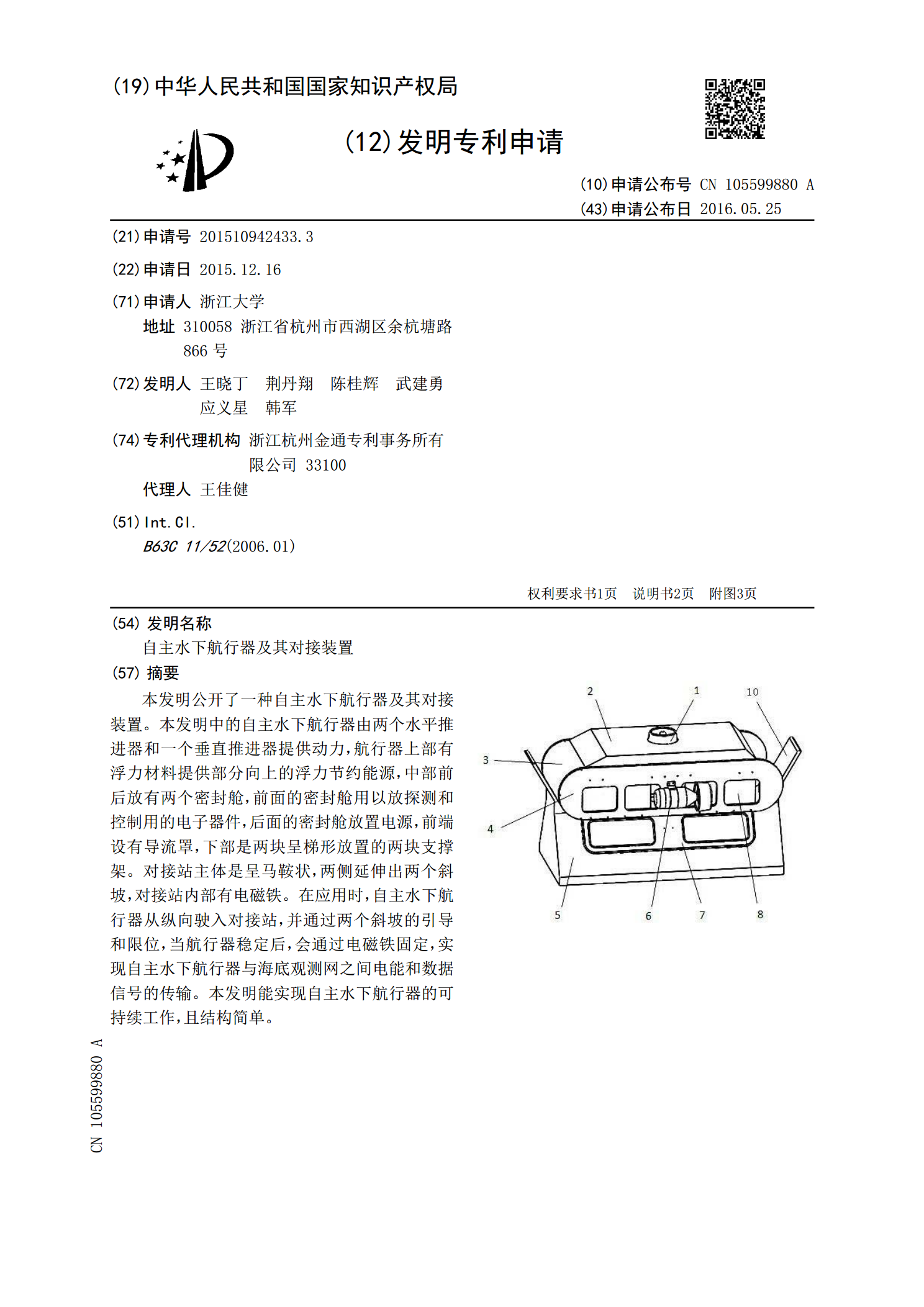
本发明公开了一种自主水下航行器及其对接装置。本发明中的自主水下航行器由两个水平推进器和一个垂直推进器提供动力,航行器上部有浮力材料提供部分向上的浮力节约能源,中部前后放有两个密封舱,前面的密封舱用以放探测和控制用的电子器件,后面的密封舱放置电源,前端设有导流罩,下部是两块呈梯形放置的两块支撑架。对接站主体是呈马鞍状,两侧延伸出两个斜坡,对接站内部有电磁铁。在应用时,自主水下航行器从纵向驶入对接站,并通过两个斜坡的引导和限位,当航行器稳定后,会通过电磁铁固定,实现自主水下航行器与海底观测网之间电能和数据信号

自主水下航行器导航方法综述.docx
自主水下航行器导航方法综述自主水下航行器导航方法综述随着无人技术的不断发展,自主水下航行器的应用范围越来越广,已经成为海洋探测、资源勘探、海洋环境监测、水下作业等领域的重要设备。但是,由于在水下环境中,通信难度大、水下传感器精度有限、水下环境复杂等多方面因素的存在,导致自主水下航行器在水下导航中表现不如航空器和陆地车辆。因此,如何提高自主水下航行器的导航能力是一个重要的研究方向。一、水下环境的意义和复杂性水下环境与陆地和空气有着显著的区别。水下环境的介质是水,其密度比空气密度高800多倍,又因为水的性质,

一种可实现空中-水下自主运动的两栖航行器和航行方法.pdf
本发明涉及一种实现空中‑水下自主运动的两栖航行器和航行方法,包括主体舱,所述主体舱尾端设置水平尾翼和垂直尾翼,所述主体舱上还连接环形翼,环形翼两侧通过转轴转动连接跨介质推进器,所述跨介质推进器包括安装驱动电机的轮毂定子,轮毂定子外侧通过定子支撑架连接整流导管定子,所述整流导管定子连接转轴,且所述轮毂定子两端分别转动连接轮毂转子和水下螺旋桨,所述轮毂转子外侧通过转子支撑架连接整流导管转子,所述整流导管转子上连接空气螺旋桨叶片,所述轮毂转子还连接整流帽罩,所述主体舱内设置压载水舱,实现了航行器水空两栖航行,且