
自主水下航行器及其对接装置.pdf

新月****姐a

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自主水下航行器及其对接装置.pdf
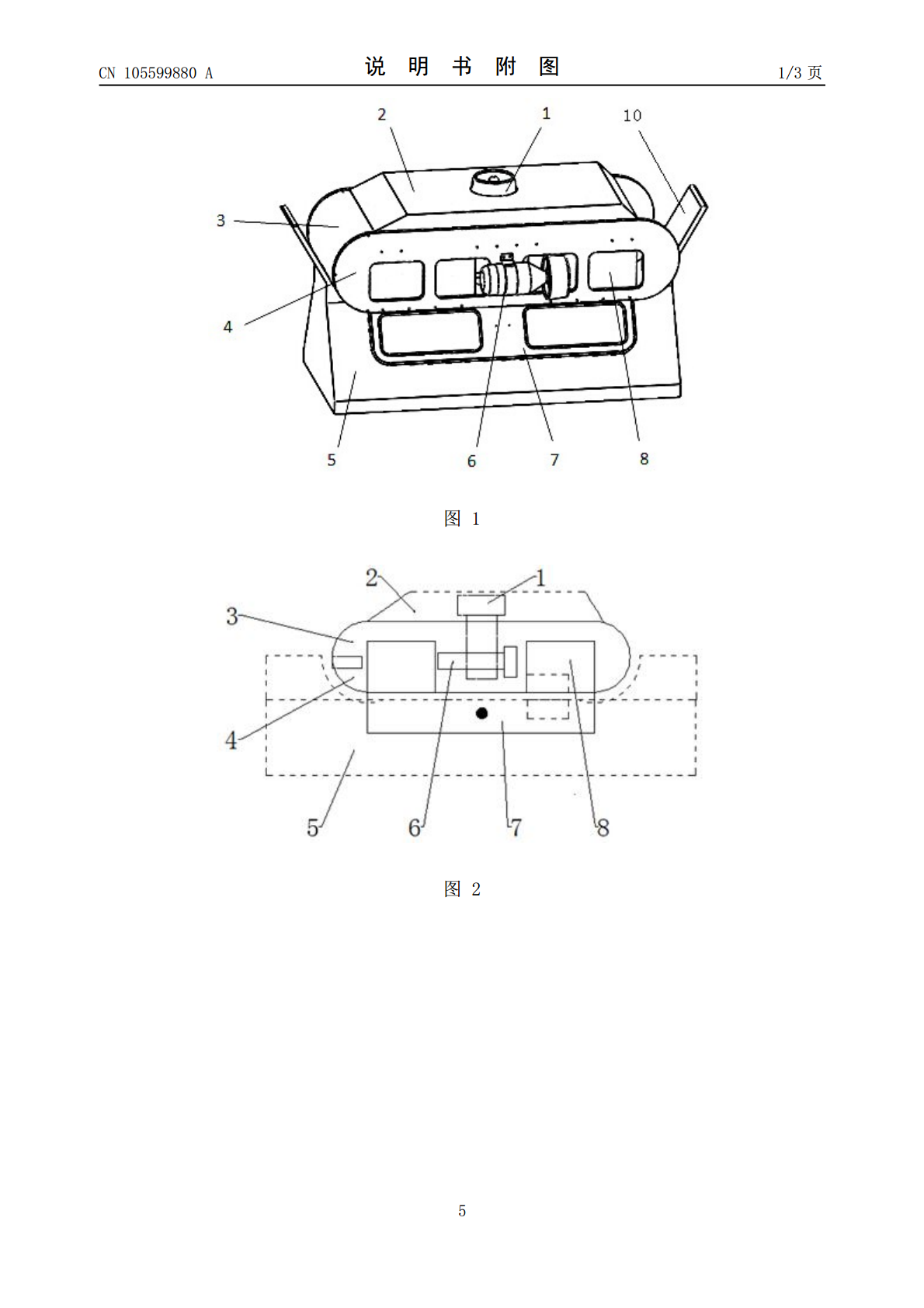
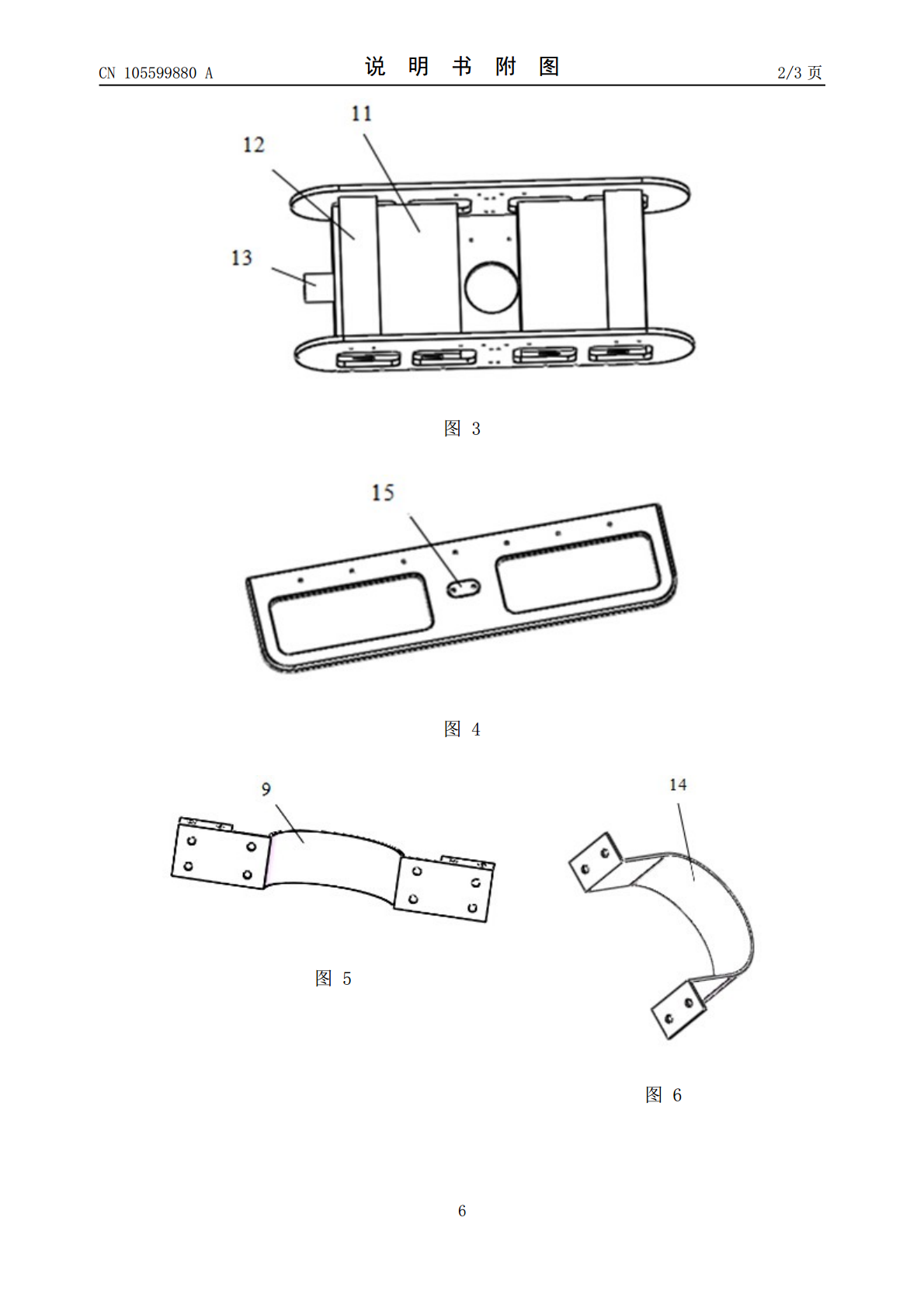
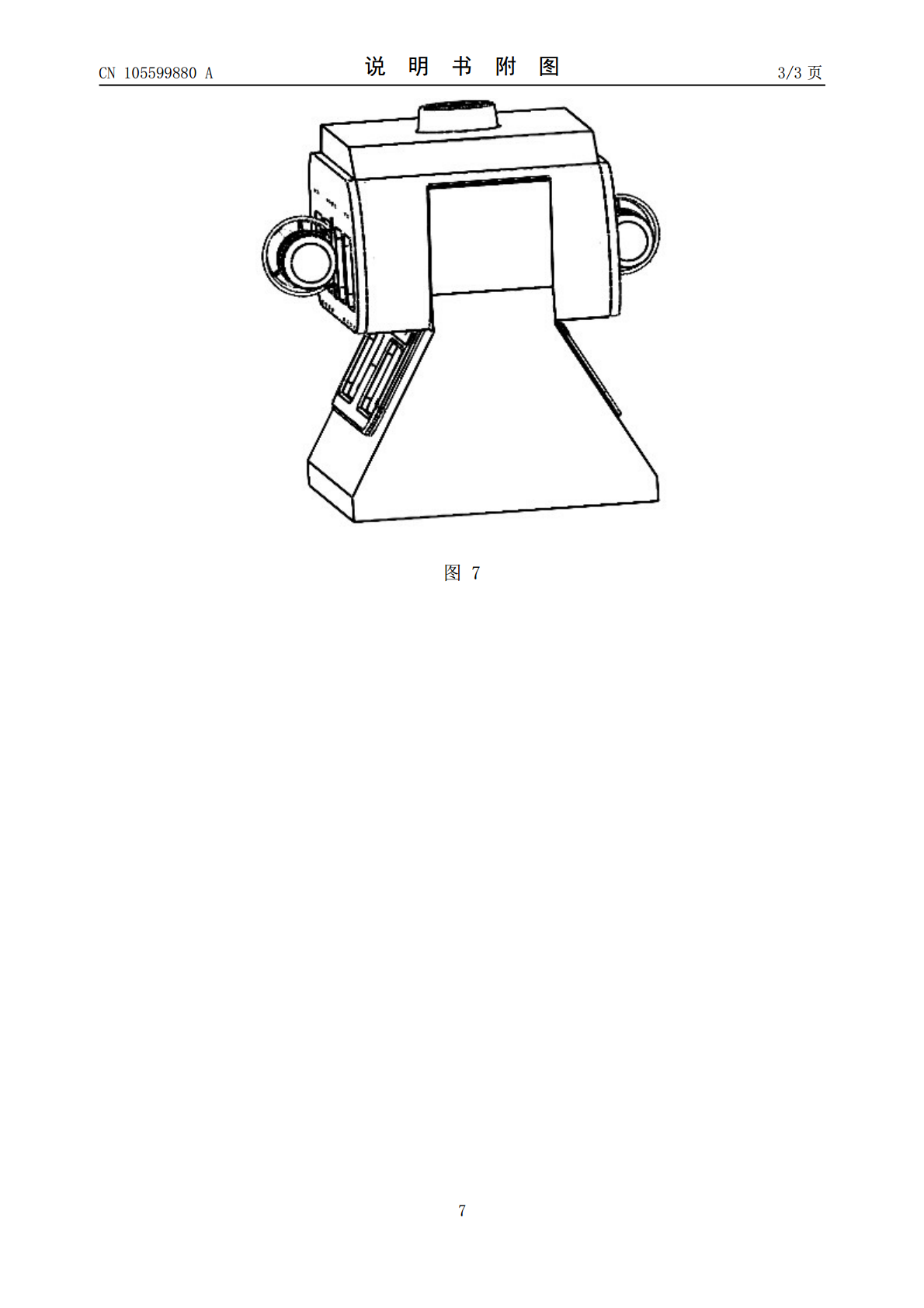
本发明公开了一种自主水下航行器及其对接装置。本发明中的自主水下航行器由两个水平推进器和一个垂直推进器提供动力,航行器上部有浮力材料提供部分向上的浮力节约能源,中部前后放有两个密封舱,前面的密封舱用以放探测和控制用的电子器件,后面的密封舱放置电源,前端设有导流罩,下部是两块呈梯形放置的两块支撑架。对接站主体是呈马鞍状,两侧延伸出两个斜坡,对接站内部有电磁铁。在应用时,自主水下航行器从纵向驶入对接站,并通过两个斜坡的引导和限位,当航行器稳定后,会通过电磁铁固定,实现自主水下航行器与海底观测网之间电能和数据信号
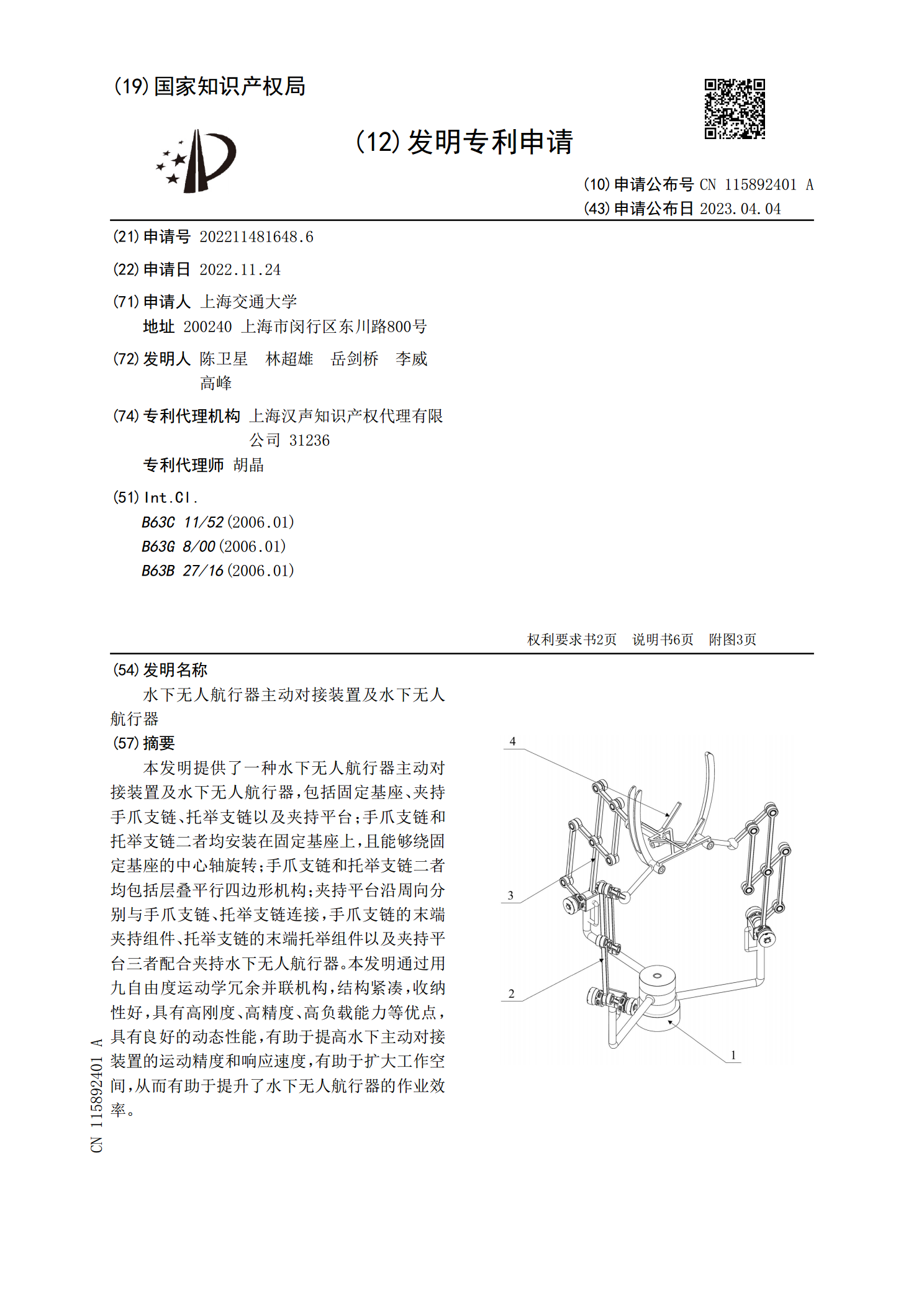
水下无人航行器主动对接装置及水下无人航行器.pdf
本发明提供了一种水下无人航行器主动对接装置及水下无人航行器,包括固定基座、夹持手爪支链、托举支链以及夹持平台;手爪支链和托举支链二者均安装在固定基座上,且能够绕固定基座的中心轴旋转;手爪支链和托举支链二者均包括层叠平行四边形机构;夹持平台沿周向分别与手爪支链、托举支链连接,手爪支链的末端夹持组件、托举支链的末端托举组件以及夹持平台三者配合夹持水下无人航行器。本发明通过用九自由度运动学冗余并联机构,结构紧凑,收纳性好,具有高刚度、高精度、高负载能力等优点,具有良好的动态性能,有助于提高水下主动对接装置的运动
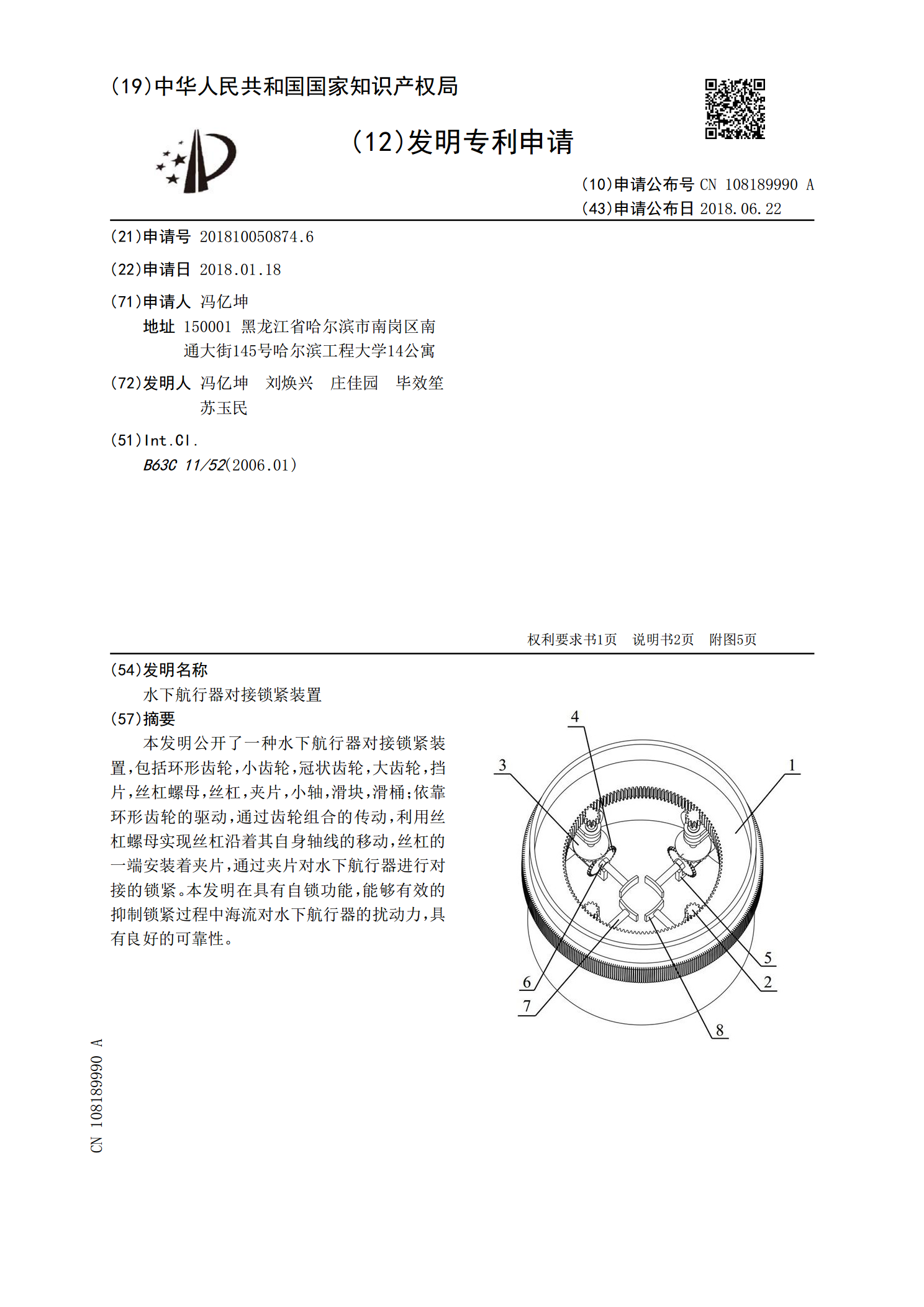
水下航行器对接锁紧装置.pdf
本发明公开了一种水下航行器对接锁紧装置,包括环形齿轮,小齿轮,冠状齿轮,大齿轮,挡片,丝杠螺母,丝杠,夹片,小轴,滑块,滑桶;依靠环形齿轮的驱动,通过齿轮组合的传动,利用丝杠螺母实现丝杠沿着其自身轴线的移动,丝杠的一端安装着夹片,通过夹片对水下航行器进行对接的锁紧。本发明在具有自锁功能,能够有效的抑制锁紧过程中海流对水下航行器的扰动力,具有良好的可靠性。
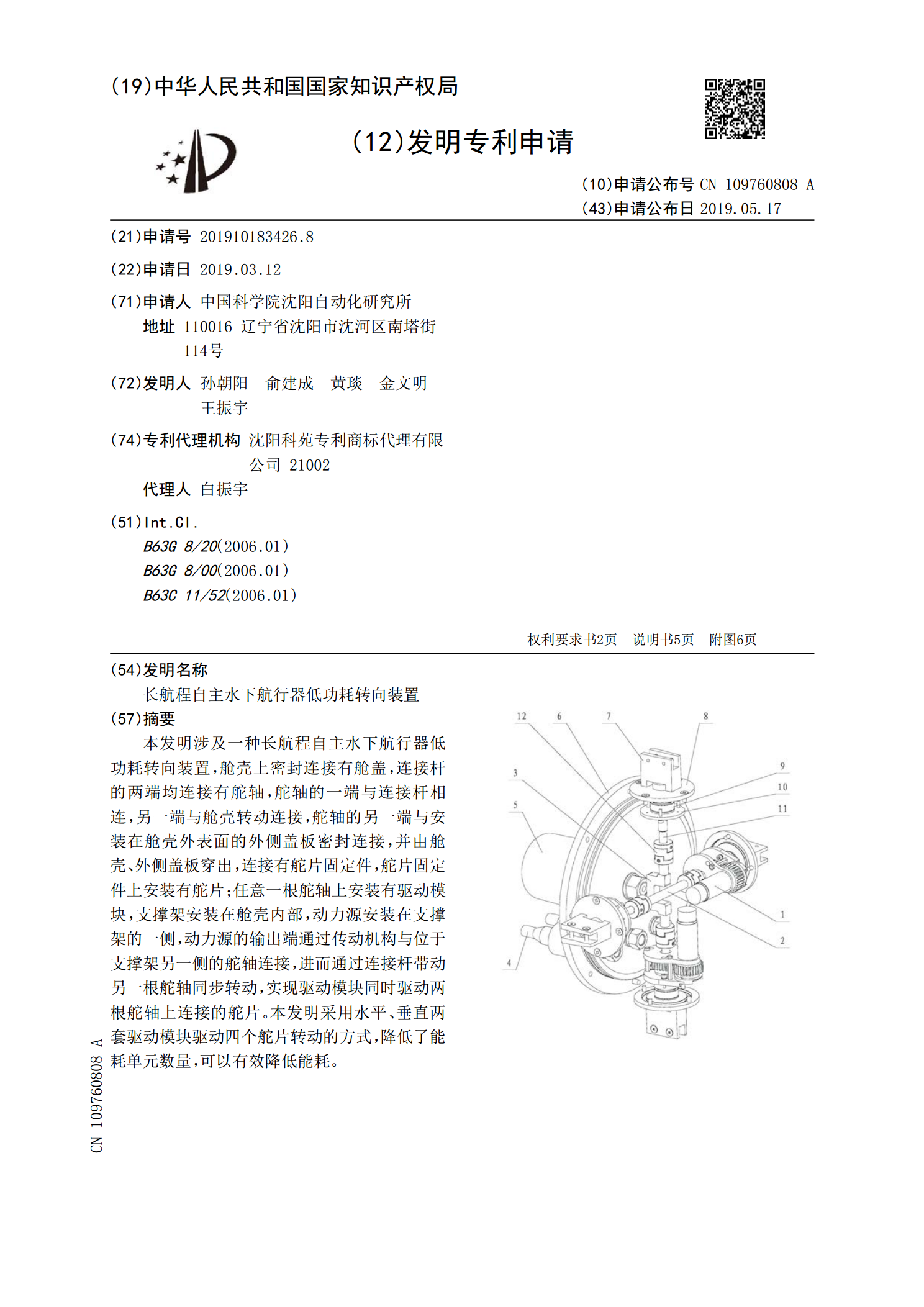
长航程自主水下航行器低功耗转向装置.pdf
本发明涉及一种长航程自主水下航行器低功耗转向装置,舱壳上密封连接有舱盖,连接杆的两端均连接有舵轴,舵轴的一端与连接杆相连,另一端与舱壳转动连接,舵轴的另一端与安装在舱壳外表面的外侧盖板密封连接,并由舱壳、外侧盖板穿出,连接有舵片固定件,舵片固定件上安装有舵片;任意一根舵轴上安装有驱动模块,支撑架安装在舱壳内部,动力源安装在支撑架的一侧,动力源的输出端通过传动机构与位于支撑架另一侧的舵轴连接,进而通过连接杆带动另一根舵轴同步转动,实现驱动模块同时驱动两根舵轴上连接的舵片。本发明采用水平、垂直两套驱动模块驱动
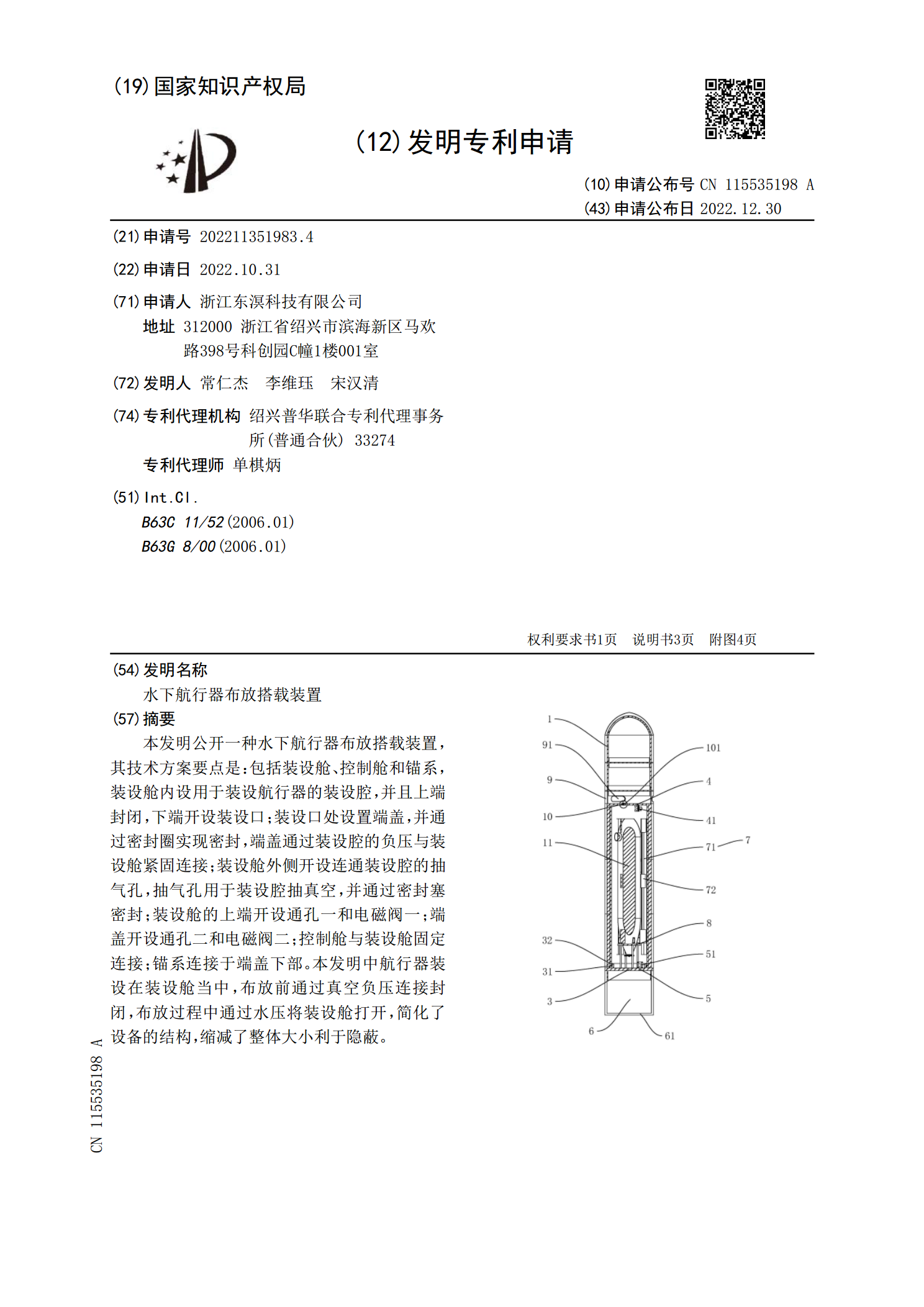
水下航行器布放搭载装置.pdf
本发明公开一种水下航行器布放搭载装置,其技术方案要点是:包括装设舱、控制舱和锚系,装设舱内设用于装设航行器的装设腔,并且上端封闭,下端开设装设口;装设口处设置端盖,并通过密封圈实现密封,端盖通过装设腔的负压与装设舱紧固连接;装设舱外侧开设连通装设腔的抽气孔,抽气孔用于装设腔抽真空,并通过密封塞密封;装设舱的上端开设通孔一和电磁阀一;端盖开设通孔二和电磁阀二;控制舱与装设舱固定连接;锚系连接于端盖下部。本发明中航行器装设在装设舱当中,布放前通过真空负压连接封闭,布放过程中通过水压将装设舱打开,简化了设备的结