
一种基于博弈论的港口码头面自动驾驶换道决策方法.pdf

邻家****ng


1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于博弈论的港口码头面自动驾驶换道决策方法.pdf
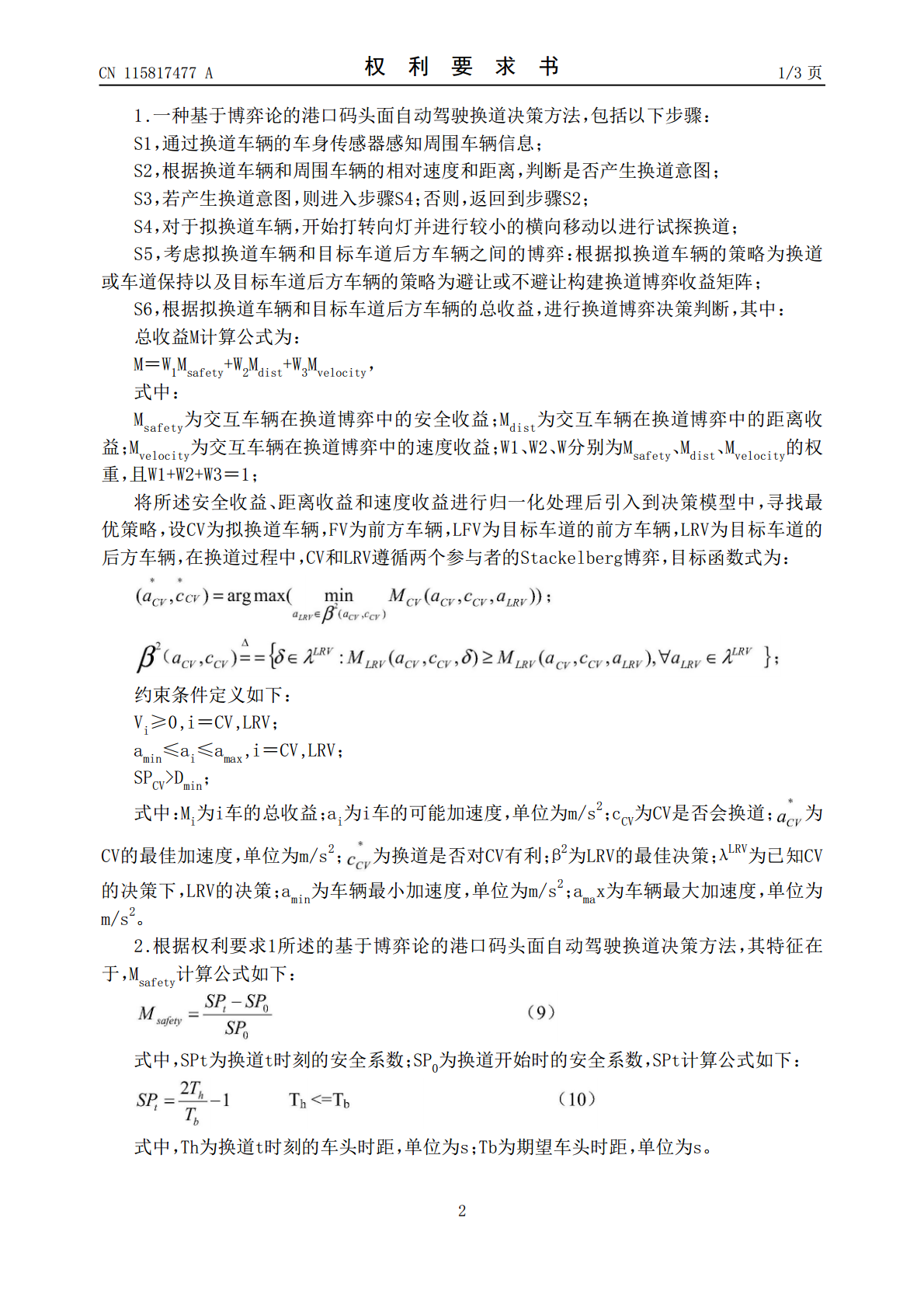
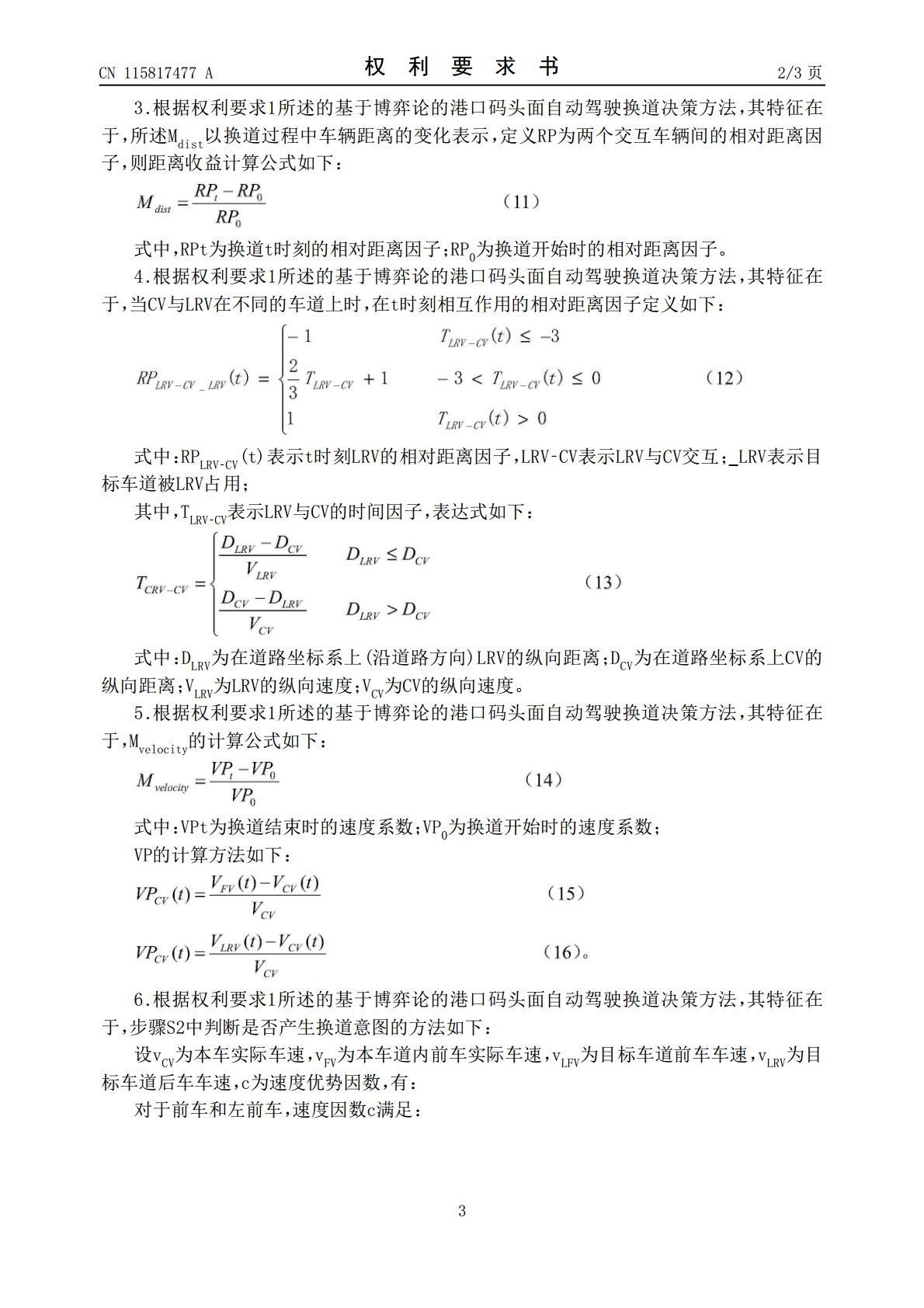
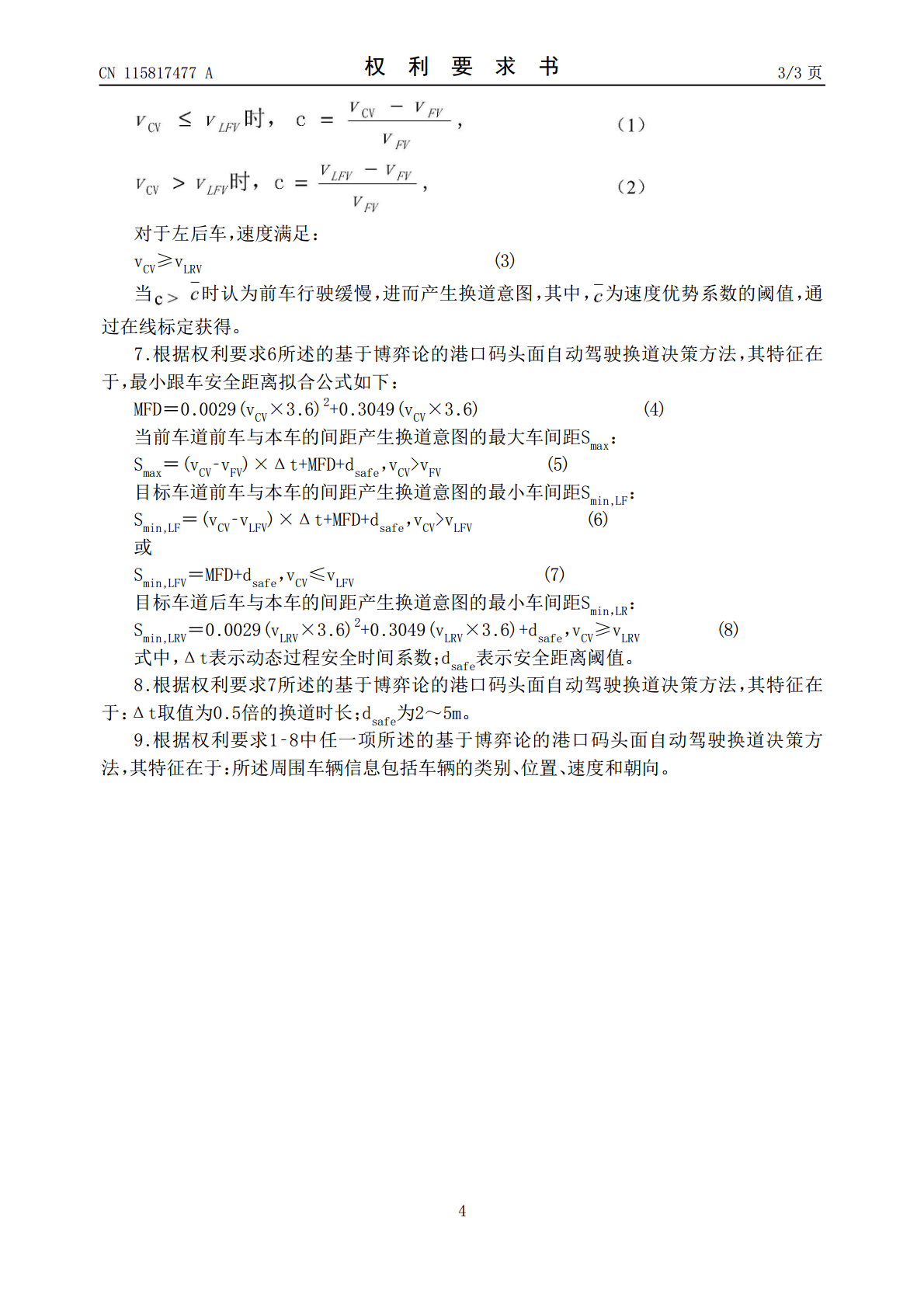
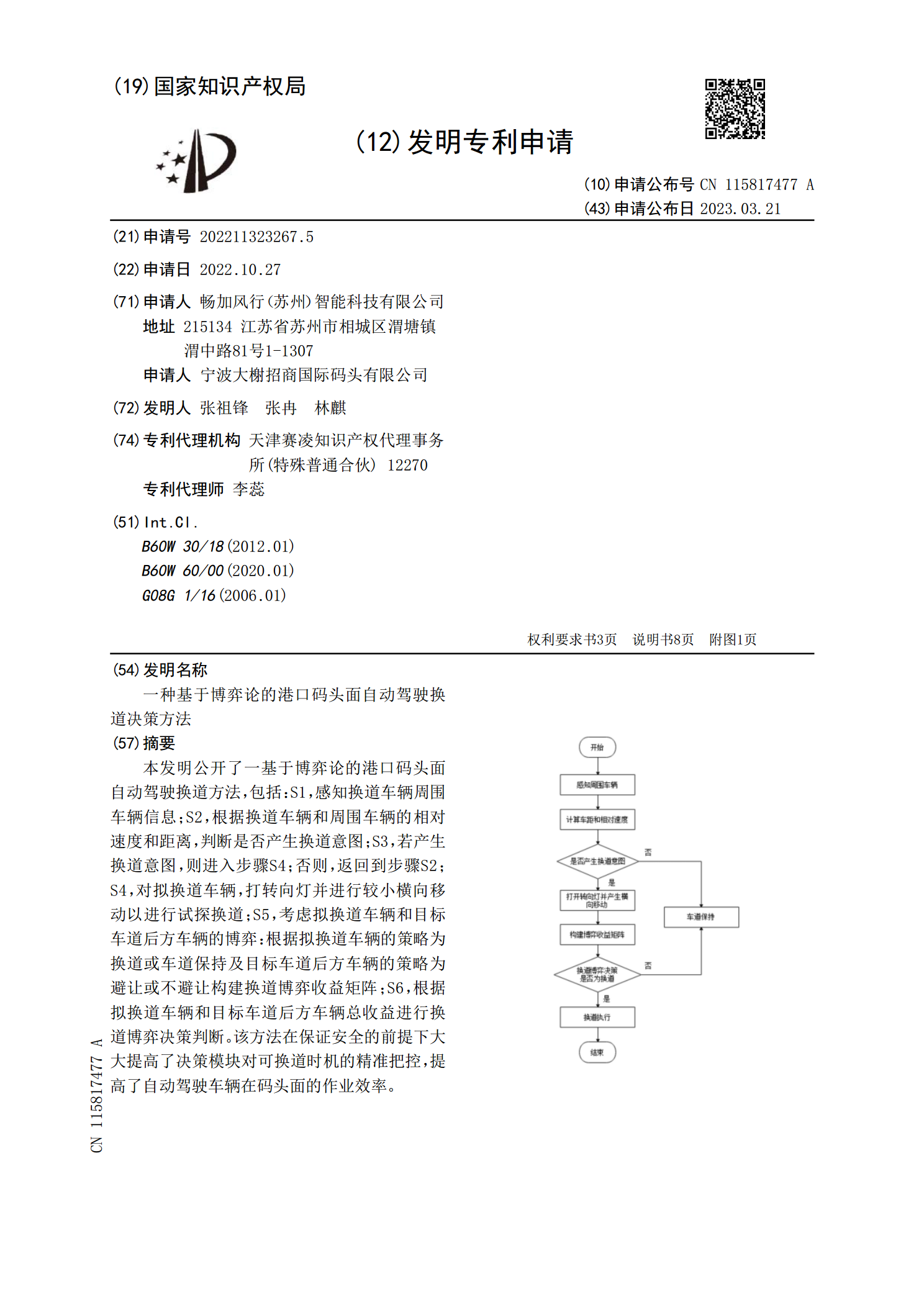
本发明公开了一基于博弈论的港口码头面自动驾驶换道方法,包括:S1,感知换道车辆周围车辆信息;S2,根据换道车辆和周围车辆的相对速度和距离,判断是否产生换道意图;S3,若产生换道意图,则进入步骤S4;否则,返回到步骤S2;S4,对拟换道车辆,打转向灯并进行较小横向移动以进行试探换道;S5,考虑拟换道车辆和目标车道后方车辆的博弈:根据拟换道车辆的策略为换道或车道保持及目标车道后方车辆的策略为避让或不避让构建换道博弈收益矩阵;S6,根据拟换道车辆和目标车道后方车辆总收益进行换道博弈决策判断。该方法在保证安全的前

一种基于深度Q学习的自动驾驶换道决策方法.pdf
一种基于深度Q学习的自动驾驶换道决策方法,属于自动驾驶技术领域。解决了现有自动驾驶车辆基于强化学习进行换道决策,由于驾驶环境状态复杂,导致学习的效率很低的问题。本发明采集目标自动驾驶车辆前后和同向左和/或右车道车辆的相对位置及与相对速度;将相对位置及与相对速度作为环境向量,输入至经Q值函数训练的全连接神经网络,获得所有换道动作的Q值估计值;判断所有换道动作是否属于当前时刻安全动作集合,提取属于当前时刻安全动作集合的换道动作;采用Argmax函数,从所述属于当前时刻安全动作集合提取Q值估计值最大的换道动作,
一种基于二维码的换电柜离线换电方法.pdf
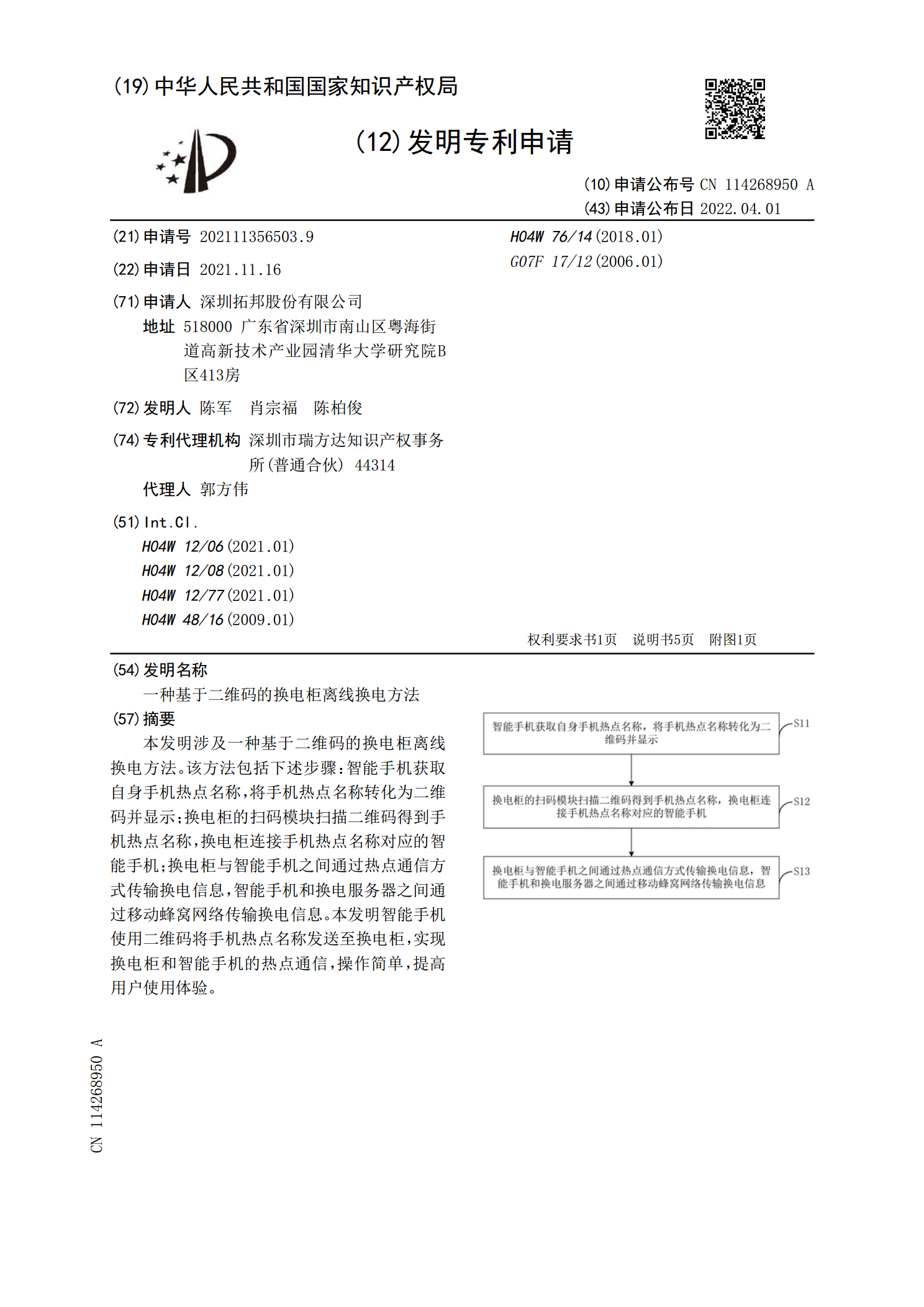
本发明涉及一种基于二维码的换电柜离线换电方法。该方法包括下述步骤:智能手机获取自身手机热点名称,将手机热点名称转化为二维码并显示;换电柜的扫码模块扫描二维码得到手机热点名称,换电柜连接手机热点名称对应的智能手机;换电柜与智能手机之间通过热点通信方式传输换电信息,智能手机和换电服务器之间通过移动蜂窝网络传输换电信息。本发明智能手机使用二维码将手机热点名称发送至换电柜,实现换电柜和智能手机的热点通信,操作简单,提高用户使用体验。
一种网联自动驾驶环境下考虑多目标优化的协同换道方法.pdf
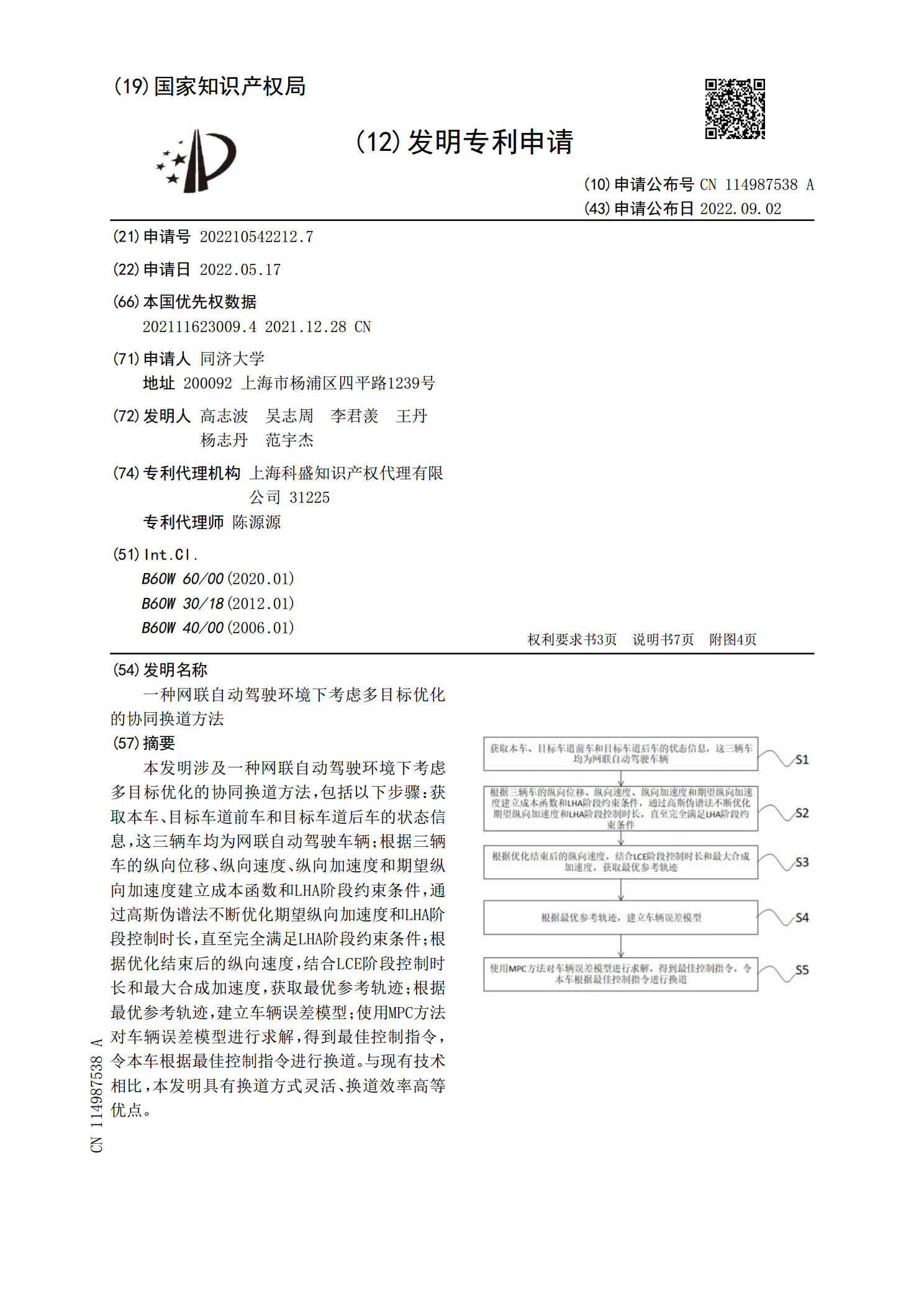
本发明涉及一种网联自动驾驶环境下考虑多目标优化的协同换道方法,包括以下步骤:获取本车、目标车道前车和目标车道后车的状态信息,这三辆车均为网联自动驾驶车辆;根据三辆车的纵向位移、纵向速度、纵向加速度和期望纵向加速度建立成本函数和LHA阶段约束条件,通过高斯伪谱法不断优化期望纵向加速度和LHA阶段控制时长,直至完全满足LHA阶段约束条件;根据优化结束后的纵向速度,结合LCE阶段控制时长和最大合成加速度,获取最优参考轨迹;根据最优参考轨迹,建立车辆误差模型;使用MPC方法对车辆误差模型进行求解,得到最佳控制指令

车辆自动驾驶时换道的控制方法、控制系统及车辆.pdf
本发明提供了一种车辆自动驾驶时换道的控制方法、控制系统及车辆,该控制方法包括:提供车辆附近预设范围的道路环境模型;根据所述道路环境模型获取本车道内前方的车辆信息和障碍物信息;根据本车车速、所述本车道内前方的车辆信息和障碍物信息判断所述车辆是否生成换道意图;如果判断生成所述换道意图,则通过所述道路环境模型获取相邻车道内车辆信息;根据本车车速和相邻车道内车辆信息判读控制是否可以当前车速向所述相邻车道换道。本发明可以在保证乘客乘车舒适性的前提下,避免车辆在换道中因视觉盲区引起车辆碰撞。