
一种网联自动驾驶环境下考虑多目标优化的协同换道方法.pdf

一只****呀淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种网联自动驾驶环境下考虑多目标优化的协同换道方法.pdf
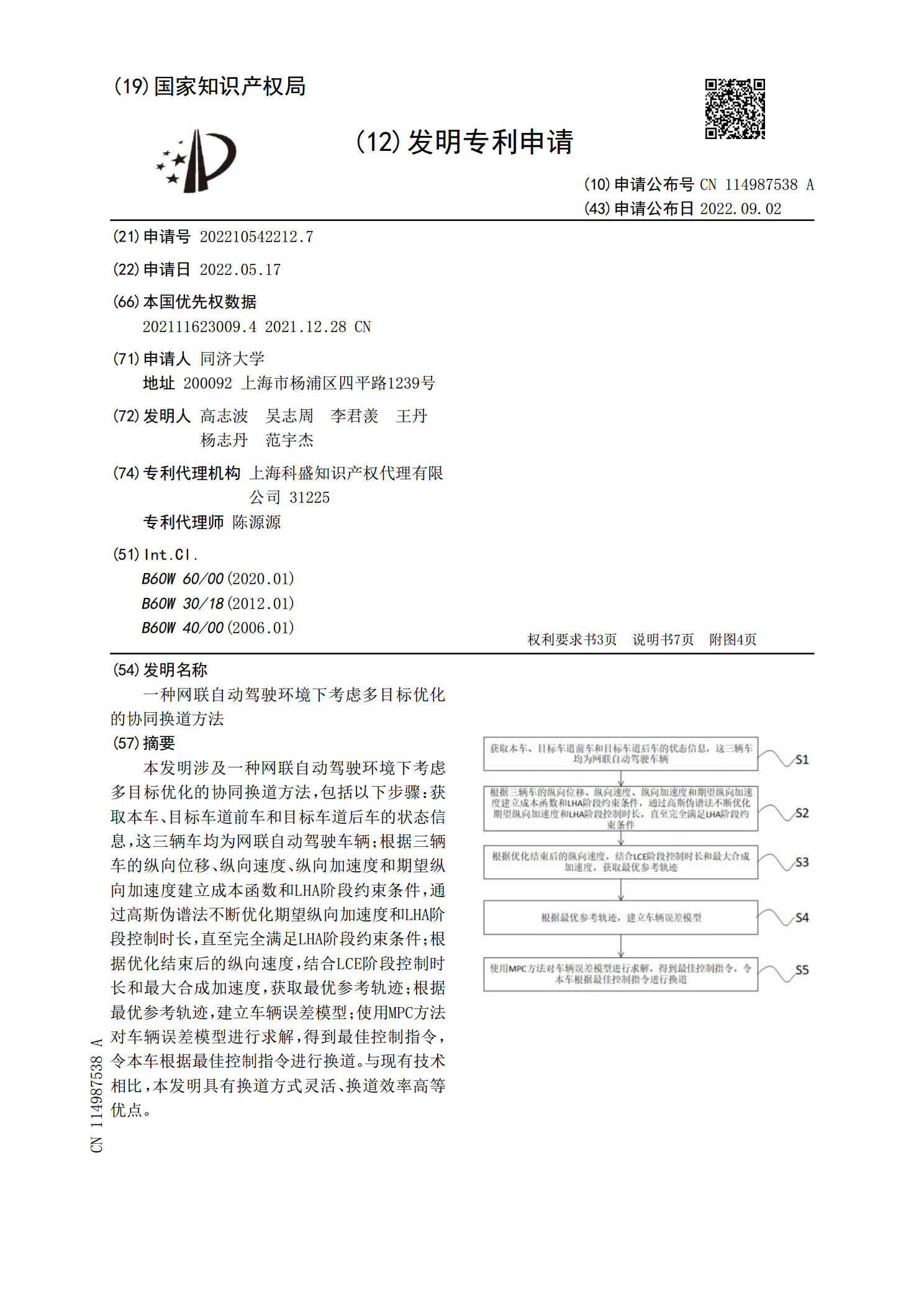
本发明涉及一种网联自动驾驶环境下考虑多目标优化的协同换道方法,包括以下步骤:获取本车、目标车道前车和目标车道后车的状态信息,这三辆车均为网联自动驾驶车辆;根据三辆车的纵向位移、纵向速度、纵向加速度和期望纵向加速度建立成本函数和LHA阶段约束条件,通过高斯伪谱法不断优化期望纵向加速度和LHA阶段控制时长,直至完全满足LHA阶段约束条件;根据优化结束后的纵向速度,结合LCE阶段控制时长和最大合成加速度,获取最优参考轨迹;根据最优参考轨迹,建立车辆误差模型;使用MPC方法对车辆误差模型进行求解,得到最佳控制指令

基于多目标优化的智能网联汽车队列换道方法.pptx
汇报人:CONTENTSPARTONEPARTTWO换道场景描述换道方法的重要性现有换道方法的局限性PARTTHREE多目标优化方法介绍多目标优化在队列换道中的应用优化目标的确定与选择PARTFOUR换道决策模型构建车辆动力学模型建立车辆间协同控制策略设计仿真实验与结果分析PARTFIVE方法优势分析局限性分析未来研究方向探讨PARTSIX实际应用场景介绍案例分析:某高速公路上的智能网联汽车队列换道实践案例总结与启示PARTSEVEN研究结论总结对未来研究的建议与展望汇报人:

智能网联环境下的多车协同换道策略研究.docx
智能网联环境下的多车协同换道策略研究标题:智能网联环境下的多车协同换道策略研究摘要:随着智能网联技术的快速发展,多车协同换道成为提高道路交通流效率和安全性的研究热点。本文通过对智能网联环境下的多车协同换道策略进行研究,旨在总结和评估目前的研究成果,并提出一种有效的策略,以提高换道过程中的交通流效率。1.引言1.1研究背景1.2研究目的2.智能网联环境下的多车协同换道策略2.1现有研究综述2.2多车协同换道的基本原理2.3多车协同换道策略分类3.多车协同换道策略评估3.1评估指标选择3.2模拟仿真实验设计3

智能网联车辆协同换道时序计算方法、装置、设备及介质.pdf
本发明提供了一种智能网联车辆协同换道时序计算方法、装置、设备及介质,智能网联车辆换道技术领域,包括获取目标车辆信息和协同车辆信息,根据所述目标车辆信息计算目标车辆的纵向加速度、换道轨迹和换道总时长;确定目标车辆触碰车道分界线的第二时刻和目标车辆离开原车道的第三时刻;构建目标车辆换道判断模型;在目标车辆满足目标车辆换道判断模型的条件下,根据目标车辆的纵向加速度和协同车辆信息计算协同车辆的协同时长;由所述换道总时长、协同车辆的协同时长、第二时刻和第三时刻确定智能网联车辆协同的换道时序,本发明用于解决现有技术中

一种智能网联队列换道方法.pdf
本发明公开了一种智能网联队列换道方法,包括:产生队列换道意图;计算目标车道车辆动态间隙;计算队列换道所需间隙;判断目标车道车辆动态间隙是否大于队列换道所需间隙,若大于则选择此间隙作为换道目标间隙;若没有则判断是否属于强制换道,若是则目标车道车辆协助实现队列协同换道;若不是,则等待下一个间隙;队列内车辆逐个开始换道,获得换道车辆与各车辆的实际距离间隙,并计算换道车辆与各车辆的安全间隙,若各实际距离间隙全部满足了计算的安全间隙,则继续进行换道,否则调整换道车辆的运动状态;待所有队列内车辆逐个实现换道,则队列换