
基于顶视点线特征融合的单目相机视觉里程计初始化方法.pdf

阳炎****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于顶视点线特征融合的单目相机视觉里程计初始化方法.pdf
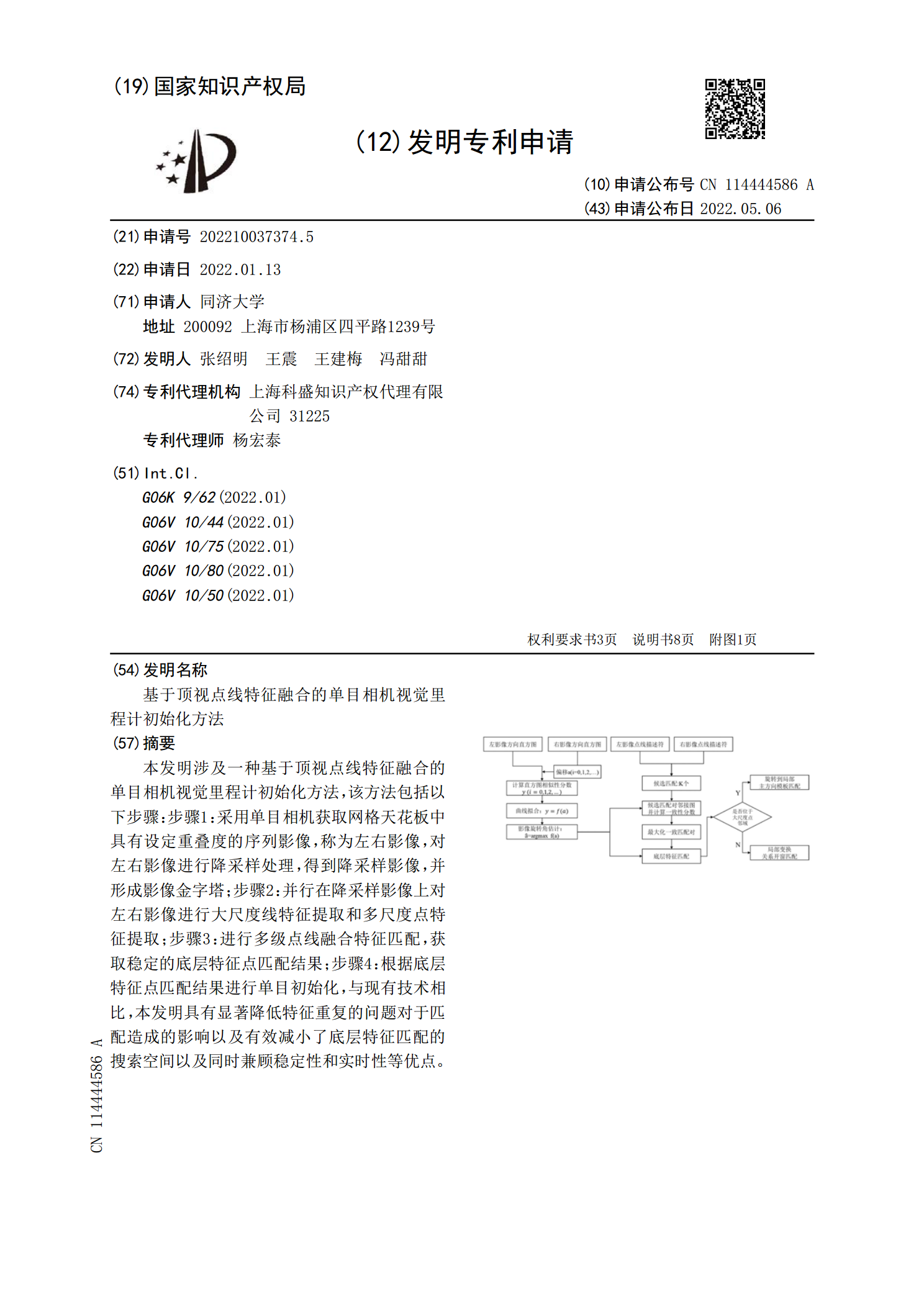
本发明涉及一种基于顶视点线特征融合的单目相机视觉里程计初始化方法,该方法包括以下步骤:步骤1:采用单目相机获取网格天花板中具有设定重叠度的序列影像,称为左右影像,对左右影像进行降采样处理,得到降采样影像,并形成影像金字塔;步骤2:并行在降采样影像上对左右影像进行大尺度线特征提取和多尺度点特征提取;步骤3:进行多级点线融合特征匹配,获取稳定的底层特征点匹配结果;步骤4:根据底层特征点匹配结果进行单目初始化,与现有技术相比,本发明具有显著降低特征重复的问题对于匹配造成的影响以及有效减小了底层特征匹配的搜索空间
基于船载单目相机的视觉特征提取方法.pdf
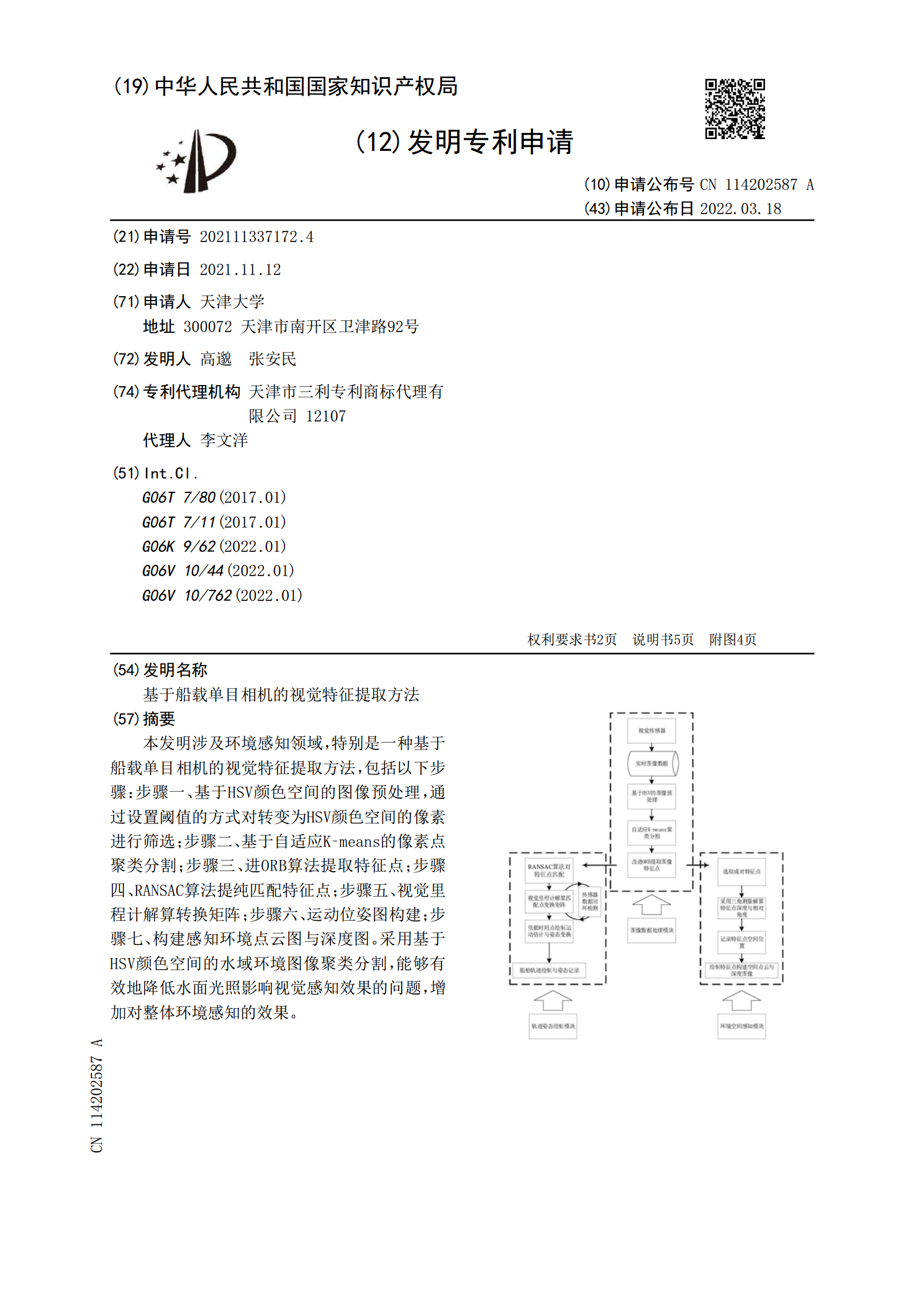
本发明涉及环境感知领域,特别是一种基于船载单目相机的视觉特征提取方法,包括以下步骤:步骤一、基于HSV颜色空间的图像预处理,通过设置阈值的方式对转变为HSV颜色空间的像素进行筛选;步骤二、基于自适应K‑means的像素点聚类分割;步骤三、进ORB算法提取特征点;步骤四、RANSAC算法提纯匹配特征点;步骤五、视觉里程计解算转换矩阵;步骤六、运动位姿图构建;步骤七、构建感知环境点云图与深度图。采用基于HSV颜色空间的水域环境图像聚类分割,能够有效地降低水面光照影响视觉感知效果的问题,增加对整体环境感知的效果
基于点线特征融合的单目视觉贯导SLAM方法及装置.pdf
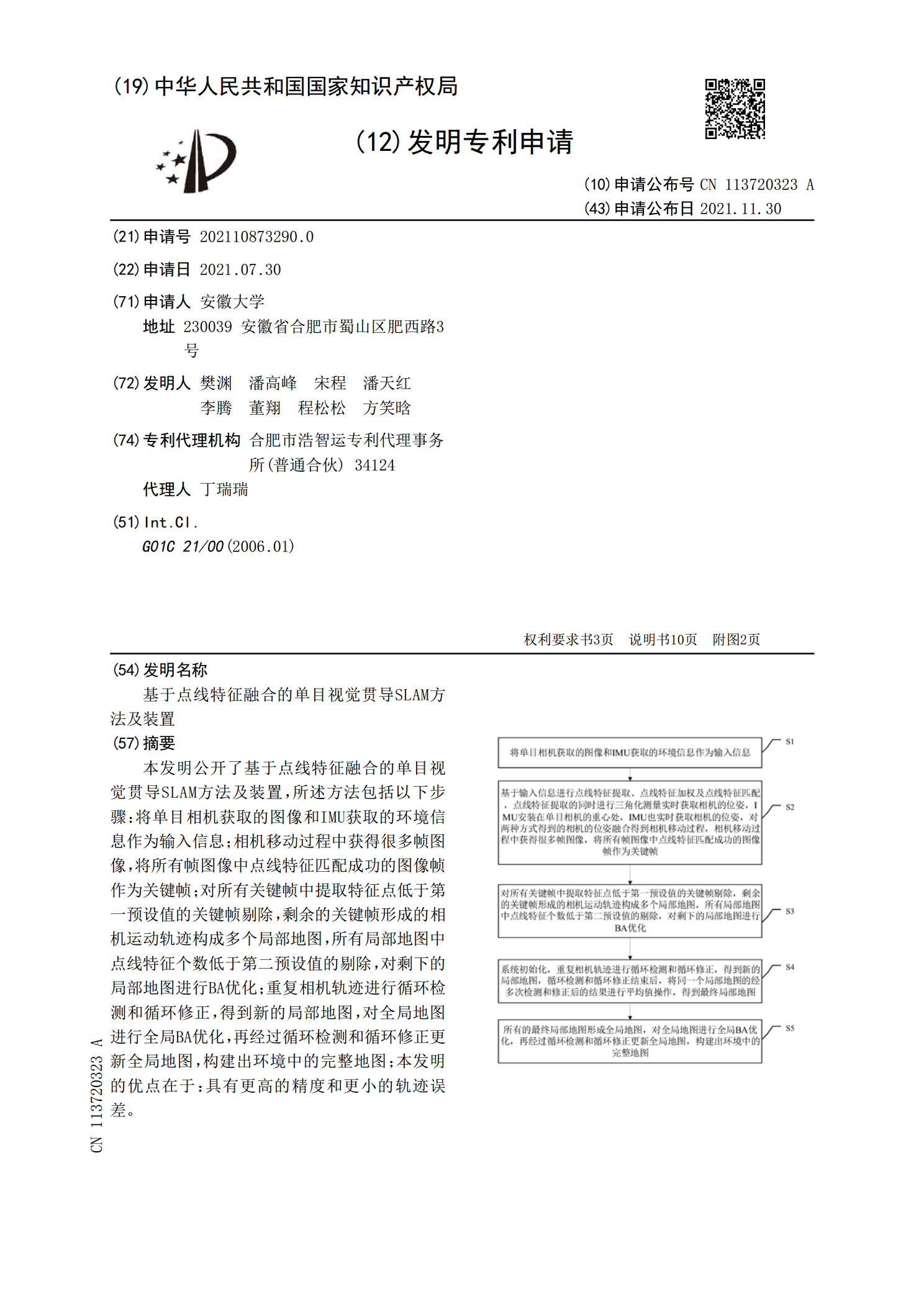
本发明公开了基于点线特征融合的单目视觉贯导SLAM方法及装置,所述方法包括以下步骤:将单目相机获取的图像和IMU获取的环境信息作为输入信息;相机移动过程中获得很多帧图像,将所有帧图像中点线特征匹配成功的图像帧作为关键帧;对所有关键帧中提取特征点低于第一预设值的关键帧剔除,剩余的关键帧形成的相机运动轨迹构成多个局部地图,所有局部地图中点线特征个数低于第二预设值的剔除,对剩下的局部地图进行BA优化;重复相机轨迹进行循环检测和循环修正,得到新的局部地图,对全局地图进行全局BA优化,再经过循环检测和循环修正更新全
一种基于点线特征融合的视觉惯性定位方法.pdf
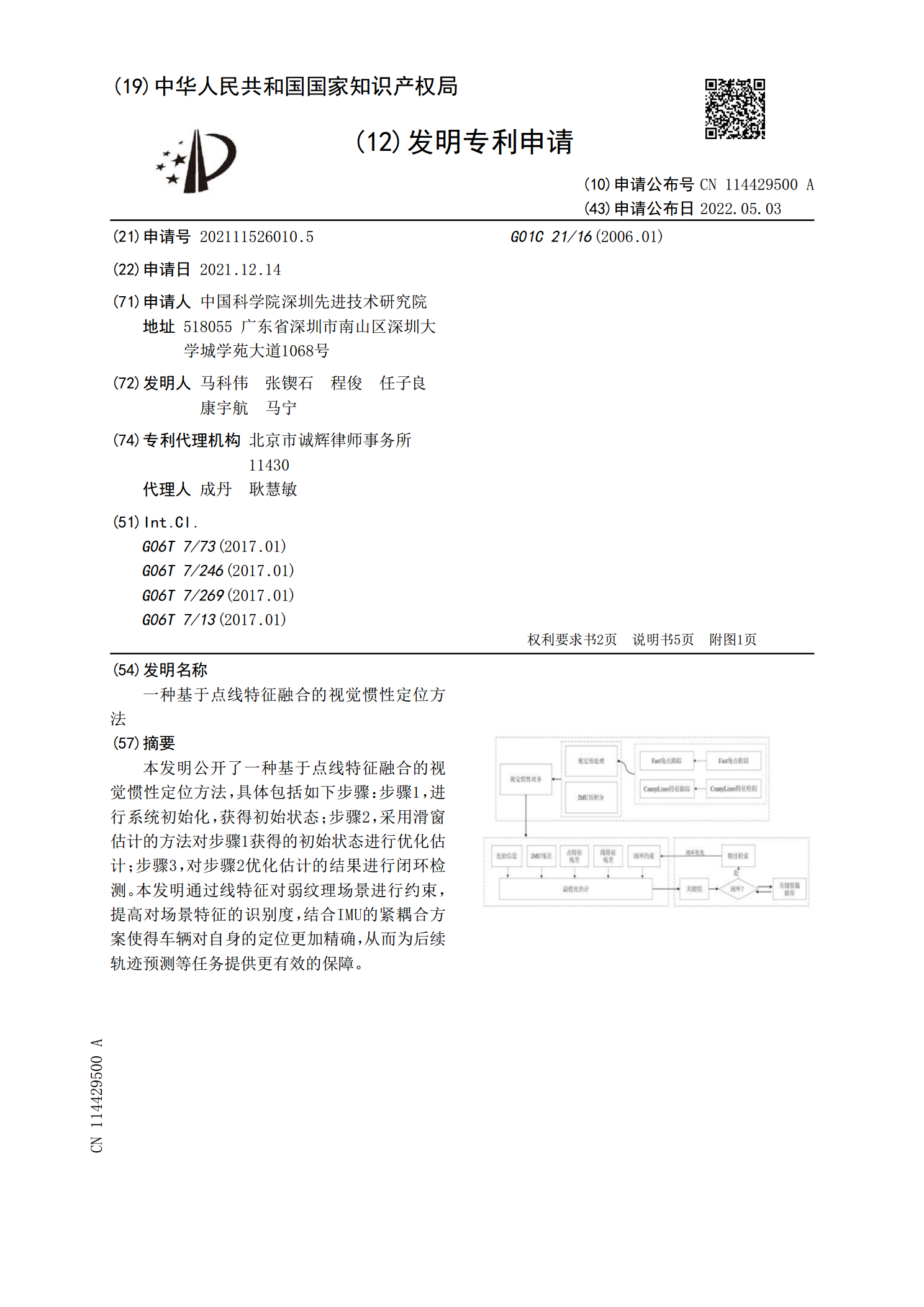
本发明公开了一种基于点线特征融合的视觉惯性定位方法,具体包括如下步骤:步骤1,进行系统初始化,获得初始状态;步骤2,采用滑窗估计的方法对步骤1获得的初始状态进行优化估计;步骤3,对步骤2优化估计的结果进行闭环检测。本发明通过线特征对弱纹理场景进行约束,提高对场景特征的识别度,结合IMU的紧耦合方案使得车辆对自身的定位更加精确,从而为后续轨迹预测等任务提供更有效的保障。
基于单目相机重建的虚实融合渲染方法及装置.pdf
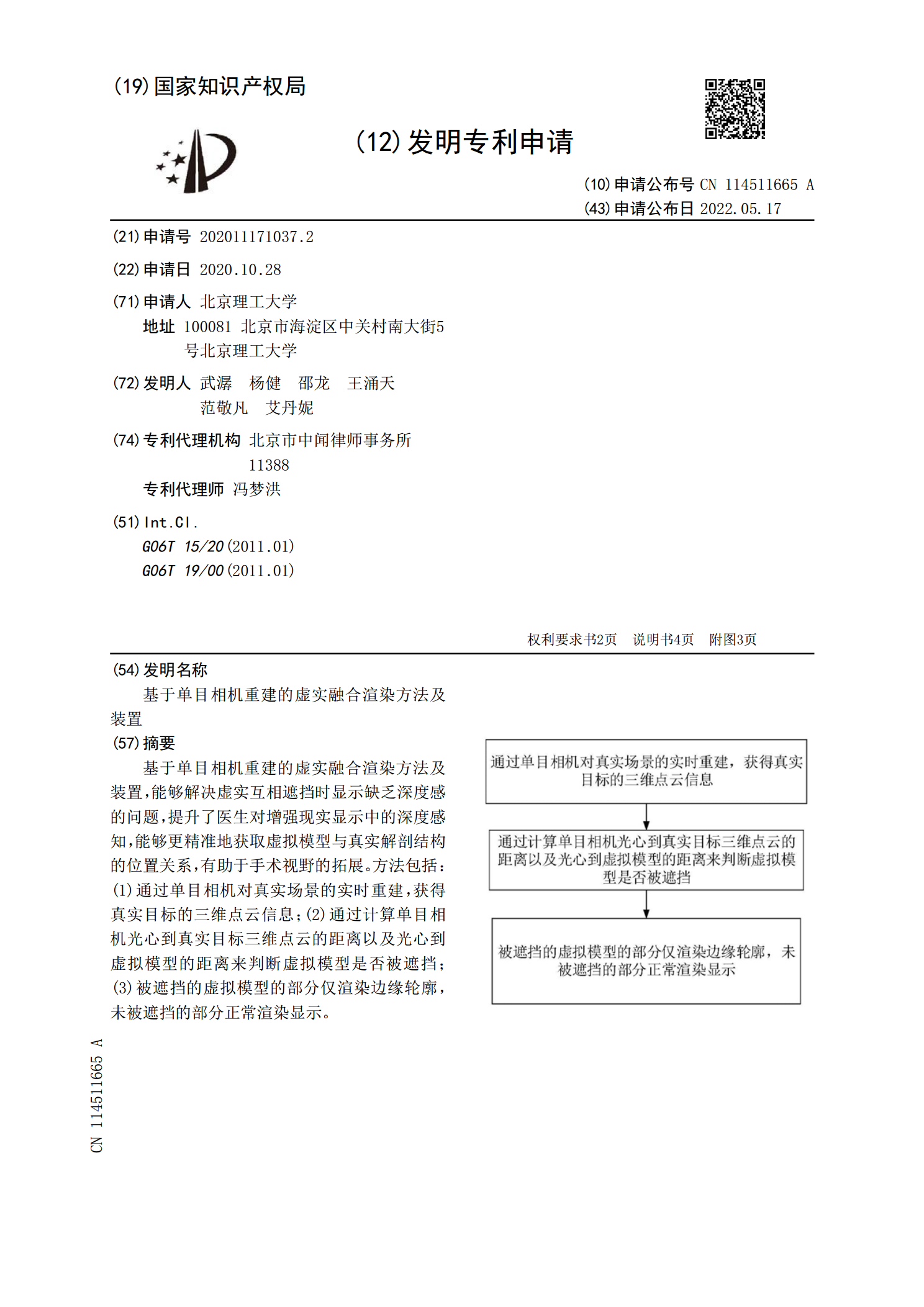
基于单目相机重建的虚实融合渲染方法及装置,能够解决虚实互相遮挡时显示缺乏深度感的问题,提升了医生对增强现实显示中的深度感知,能够更精准地获取虚拟模型与真实解剖结构的位置关系,有助于手术视野的拓展。方法包括:(1)通过单目相机对真实场景的实时重建,获得真实目标的三维点云信息;(2)通过计算单目相机光心到真实目标三维点云的距离以及光心到虚拟模型的距离来判断虚拟模型是否被遮挡;(3)被遮挡的虚拟模型的部分仅渲染边缘轮廓,未被遮挡的部分正常渲染显示。